Изобретение относится к упаковочной технике и может быть использовано для упаковки готовых изделий, например швейных машин.
Цель изобретения - повышение производительности путем исключения необходи- 1мости переналадки при подаче коробки различных типоразмеров.
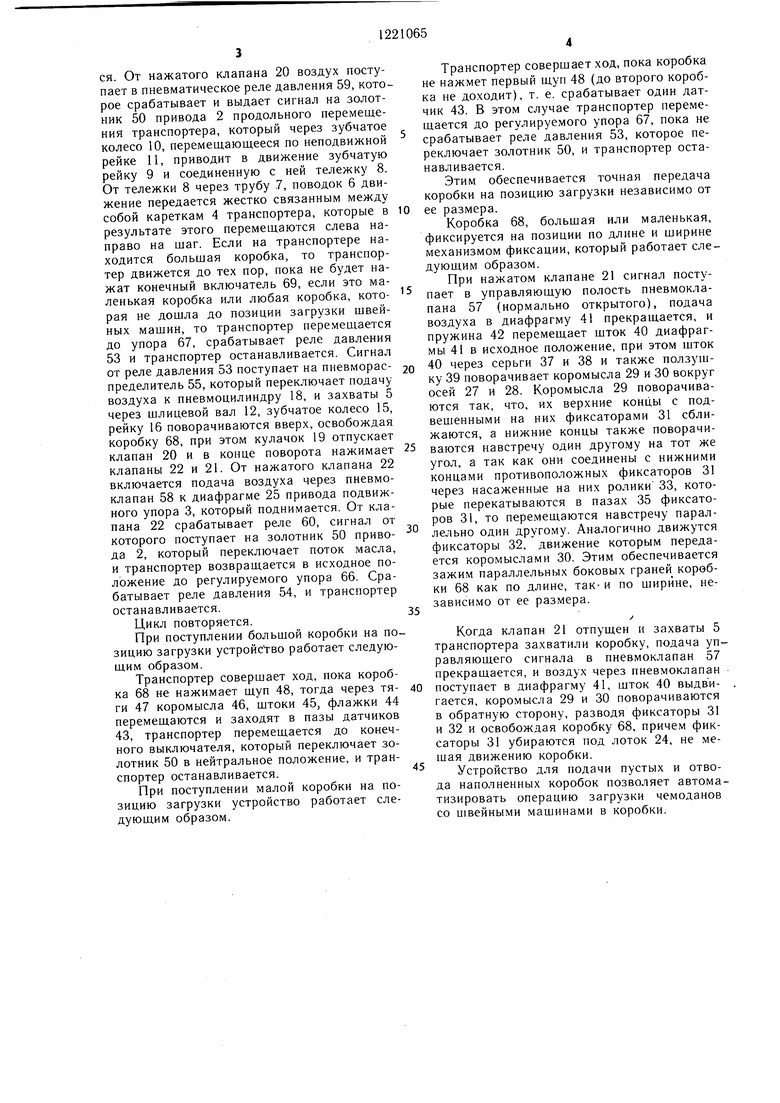
На фиг. 1, 2 и 3 схематично показано устройство для подачи пустых и отвода наполненных коробок, вид сбоку; на фиг. 4 и 5 - то же, вид сверху; на фиг. 6 - то же, вид спереди; на фиг. 7 изображен вид А на фиг. 3; на фиг. 8 - разрез Б-Б на фиг. 3; на фиг. 9- схема управления устройством; на фиг. 10- механизм фиксации, вид спереди; на фиг. 11 - то же, вид сбоку.
Устройство для подачи пустых и отвода наполненных коробок содержит раму 1, на которой смонтирован транспортер с приводом 2, упор 3 для остановки поданной коробки и механизм фиксации. Для повышения производительности устройство снажено смонтированными на транспортере каретками 4 с захватами 5. Каретки 4 жестко соединены между собой и размещены на одинаковом расстоянии одна от другой. Каретки 4 через поводок 6 и трубу 7 телескопически связаны с тележкой 8 посредством зубчатой рейки 9, находящейся в зацеплении с зубчатым колесом 10, вращающимся на оси штока привода 2 и имеющим возможность перемещаться по зубчатой рейке 11. Устройство снабжено приводом поворота захватов 5, включающим в себя шлице- вой вал 12, входящий одним концом в шли- цевую втулку 13 на первой каретке, а другим концом закрепленный в подщипниковой опоре 14. Зубчатое колесо 15 входит в зацепление с рейкой 16, перемещающейся в направляющей 17 и жестко связанной с пнев- моцилиндром 18. На конце шлицевого вала 12 установлен кулачок 19, взаимодействующий с пневматическими клапанами 20-22, установленными на опоре 23. Лоток 24 для перемещения пустых коробок смонтирован на раме 1. Упор 3 выполнен подвижным, смонтирован под лотком 24 и имеет привод от пневматической диафрагмы 25. Механизм фиксации выполнен в виде расположенных во взаимно перпендикулярных плоскостях коромыс- ловых механизмов, имеющих общий привод и состоящих из установленных в раме 26 на осях 27 и 28 коромысел 29 и 30, верхние концы которых щарнирно соединены с фиксаторами 31 продольной и 32 поперечной фиксации. На нижних концах коромысел 29 и 30 насажены ролики 33 и 34, которые входят в пазы 35 и 36. Коромысла 29 и 30 через серьги 37 и 38 и ползущ- ку 39 соединены со штоком 40 диафрагмы 41, на который воздействует пружина 42. Каретки 4 кинематически связаны с приводом 2 транспортера и с приводом поворота захватов.
0
5
0
0
5
0
5
Транспортер оснащен системой опознавания коробок, выполненной в виде бесконтактных датчиков 43 с пазами, в которые входят флажки 44, закрепленные на штоках 45, щарнирно связанных через коромысла 46 и тяги 47 со щупа.ми 48, установленных на осях кронщтейнов 49. Управление работой приводом 2 осуществляют гидравлической схемой, включающей в себя золотник 50, регуляторы потока с тормозными золотниками 51 и 52, гидравлические реле давления 53 и 54. Пневмоцилиндр 18 управляется пневмо- схемой, включающей в себя пневмораспре- делитель 55, дроссели 56, пневмоклапа- ны 57 и 58, пневматические реле давления 59 и 60. Диафрагма 41 управляется пневмо- клапаном 57. Контроль исполнения осуществляется пневматическим реле давления 61. Диафрагма 25 подвижного упора 3 управляется пневмоклапаном 58.
Взаимосвязь гидравлической и пневматической схем и контроль исполнения команд обеспечиваются пневмоклапанами 20-22 и конечными выключателями 62-64. Устройство также снабжено рольгангом-накопителем 65 и регулируемыми упорами 66 и 67, взаимодействующими с подаваемой тележкой, 8, а также конечным выключателем 69.
Устройство для подачи пустых и отвода наполненных коробок работает следующим образом.
В исходном положении транспортер находится в крайнем левом положении, захваты 5 подняты. Коробка 68 находится на первой позиции транспортера, при этом конечный выключатель 62 замкнут, упор 3 поднят, а фиксаторы 31 и 32 механизма фиксации разведены.
Когда транспортер доходит до крайнего левого положения, срабатывает реле давления 54 и переключает золотник 50 в среднее (нейтральное) положение. В то же время нажаты клапаны 21 и 22 кулачков 19. Если на транспортер поступает коробка 68 с рольганга-накопителя 65, то подается сигнал от агрегата обандероливания на пневмо- распределитель 55, который переключается, Пневмоцилиндр 18 срабатывает и, двигая рейку 16, поворачивает зубчатое колесо 15, а значит, и щлицевой вал 12, щлице- вую втулку 13 и, соответственно, захваты 5 всех кареток транспортера на 90° вниз, при этом один из захватов захватывает коробку 68.
В начале поворота клапаны 21 и 22 отпускаются, осуществляется размыкание кулачка 19. В конце рабочего хода привода 2 кулачок 19 нажимает клапан 20, прекращается подача воздуха в диафрагму 25 привода подвижного упора 3 через пневмо- клапан 58, и упор 3 убирается. Одновременно подача воздуха осуществляется через пневмоклапан 57 к диафрагме 41 механизма фиксации. Фиксаторы 31 и 32 расходятся. От нажатого клапана 20 воздух поступает в пневматическое реле давления 59, которое срабатывает и выдает сигнал на золотник 50 привода 2 продольного перемещения транспортера, который через зубчатое колесо 10, перемещающееся по неподвижной рейке И, приводит в движение зубчатую рейку 9 и соединенную с ней тележку 8. От тележки 8 через трубу 7, поводок 6 движение передается жестко связанным между собой кареткам 4 транспортера, которые в результате этого перемещаются слева направо на щаг. Если на транспортере находится большая коробка, то транспортер движется до тех пор, пока не будет нажат конечный включатель 69, если это маленькая коробка или любая коробка, кото- рая не дощла до позиции загрузки швейных машин, то транспортер перемещается до упора 67, срабатывает реле давления 53 и транспортер останавливается. Сигнал от реле давления 53 поступает на пневморас- пределитель 55, который переключает подачу воздуха к пневмоцилиндру 18, и захваты 5 через шлицевой вал 12, зубчатое колесо 15, рейку 16 поворачиваются вверх, освобождая коробку 68, при этом кулачок 19 отпускает клапан 20 и в конце поворота нажимает клапаны 22 и 21. От нажатого клапана 22 включается подача воздуха через пневмо- клапан 58 к диафрагме 25 привода подвижного упора 3, который поднимается. От клапана 22 срабатывает реле 60, сигнал от которого поступает на золотник 50 приво- да 2, который переключает поток масла, и транспортер возвращается в исходное положение до регулируемого упора 66. Срабатывает реле давления 54, и транспортер останавливается.
Цикл повторяется.
При поступлении большой коробки на позицию загрузки устройство работает следующим образом.
Транспортер совершает ход, пока коробка 68 не нажимает щуп 48, тогда через тя- ги 47 коромысла 46, щтоки 45, флажки 44 перемещаются и заходят в пазы датчиков 43, транспортер перемешается до конечного выключателя, который переключает золотник 50 в нейтральное положение, и транспортер останавливается.
При поступлении малой коробки на позицию загрузки устройство работает следующим образом.
Транспортер совершает ход, пока коробка не нажмет первый щуп 48 (до второго коробка не доходит), т. е. срабатывает один датчик 43. В этом случае транспортер перемешается до регулируемого упора 67, пока не срабатывает реле давления 53, которое переключает золотник 50, и транспортер останавливается.
Этим обеспечивается точная передача коробки на позицию загрузки независимо от ее размера.
Коробка 68, большая или маленькая, фиксируется на позиции по длине и ширине механизмом фиксации, который работает следующим образом.
При нажатом клапане 21 сигнал поступает в управляющую полость пневмокла- пана 57 (нормально открытого), подача воздуха в диафрагму 41 прекращается, и пружина 42 перемещает шток 40 диафрагмы 41 в исходное положение, при этом щток 40 через серьги 37 и 38 и также ползуш- ку 39 поворачивает коромысла 29 и 30 вокруг осей 27 и 28. Коромысла 29 поворачиваются так, что, их верхние концы с подвешенными на них фиксаторами 31 сближаются, а нижние концы также поворачиваются навстречу один другому на тот же угол, а так как они соединены с нижними концами противоположных фиксаторов 31 через насаженные на них ролики 33, которые перекатываются в пазах 35 фиксаторов 31, то перемещаются навстречу параллельно один другому. Аналогично движутся фиксаторы 32, движение которым передается коромыслами 30. Этим обеспечивается зажим параллельных боковых граней коробки 68 как по длине, так- и по ширине, независимо от ее размера.
J
Когда клапан 21 отпущен и захваты 5 транспортера захватили коробку, подача управляющего сигнала в пневмоклапан 57 прекращается, и воздух через пневмоклапан поступает в диафрагму 41, шток 40 выдвигается, коромысла 29 и 30 поворачиваются в обратную сторону, разводя фиксаторы 31 и 32 и освобождая коробку 68, причем фиксаторы 31 убираются под лоток 24, не мешая движению коробки.
Устройство для подачи пустых и отвода наполненных коробок позволяет автоматизировать операцию загрузки чемоданов со швейными машинами в коробки.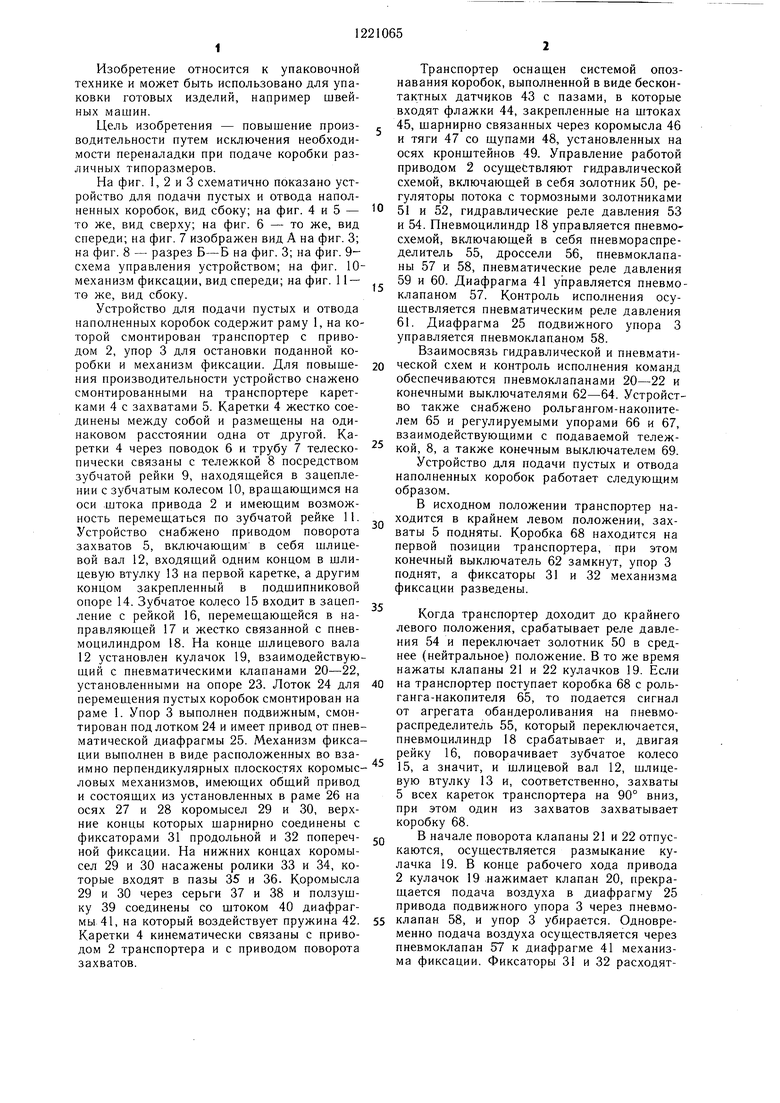





/1
V
17n
гз
-IS
5 Ч
58 П
Ф(г.
4
т
J
/
57 /
х5
/
7
12
BudHi
51
Г
7
51
/// //////л
Г г
I .
5J Ы
I
о:
X
3
5Q
А
U
Фиг.
J6
Фиг. Я
ВНИИПИ Заказ 1540/25 Тираж713 Подписное Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| УСТРОЙСТВО для ПОДАЧИ ПУСТЫХ и ОТВОДА НАПОЛНЕННЫХ КОРОБОВ К УПАКОВОЧНЫМ МАШИНАМ | 0 |
|
SU220132A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
