1
Изобретение относится к кондитерскому производству, а именно к устройствам для укладки изделий, например конфет, в коробки.
Известно устройство для укладки изделий в коробки, включающее подающее приспособление, укладочную головку с вакуумными захватами, укрепленными на каретках, имеющих возможность возвратно-поступательного перемещения, механизм поворота вакуумиых захватов вокруг вертикальной оси и механизм управления.
Цель изобретения - повышение «адежности в работе устройства.
Для этого в предлагаемом устройстве механизм поворота ваКуумных захватов выполней в виде смещенных один относительно другого зубчатых секторов, закрепленных на трубках вакуумных захватов, при этом последние связаны с подвижно укрепленными зубчатыми рейками, а привод кареток выполнен в виде штанги с зубьями, взаимодействующими с механизмом управления через зубчатый сектор.
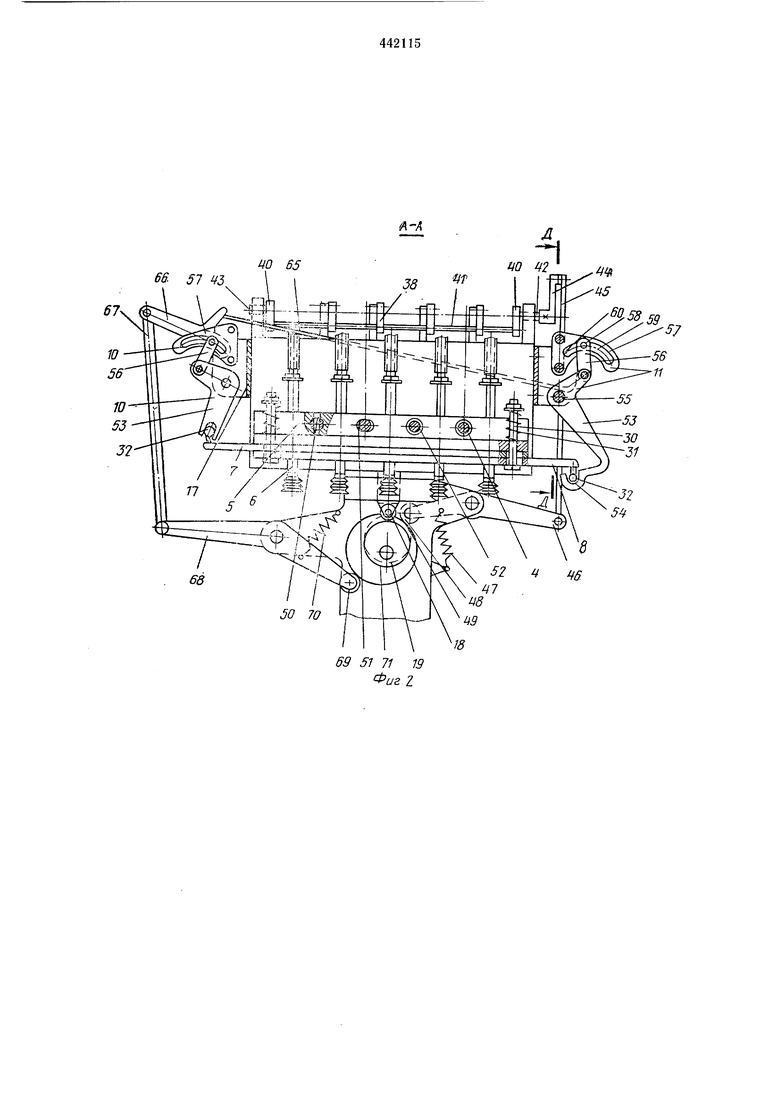
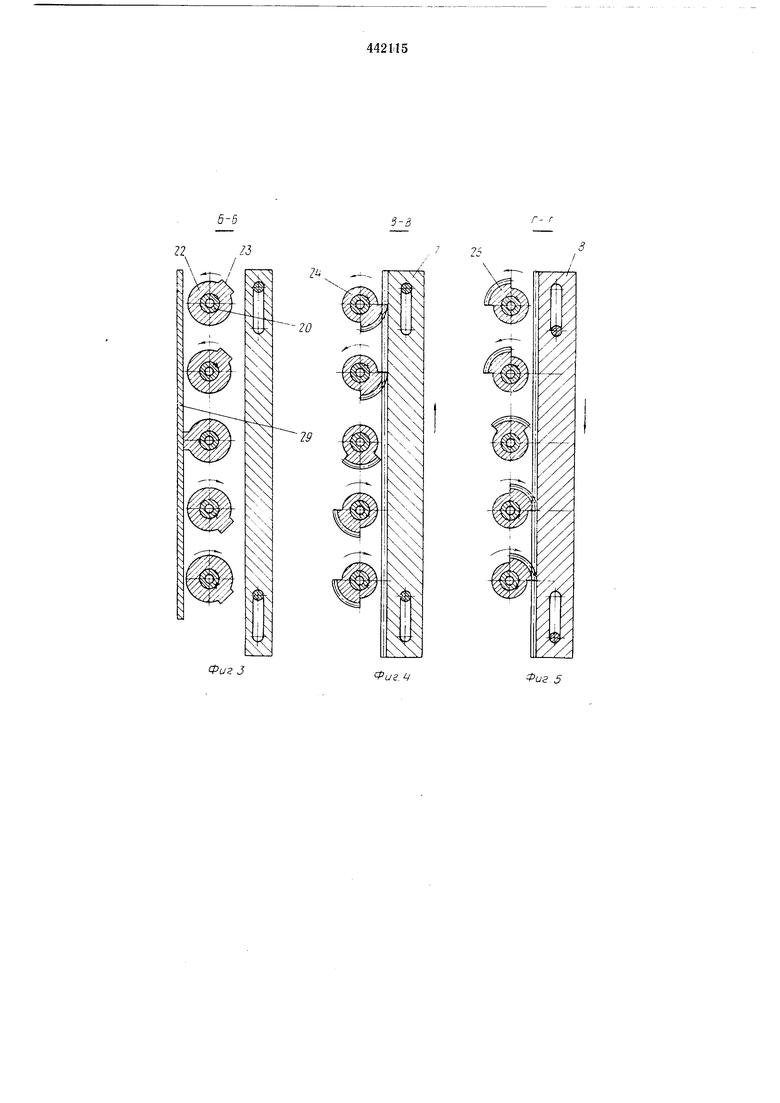
На фиг. 1 схематически изображено предлагаемое устройство; на фиг. 2 - разрез по А-А на фиг. 1; на фит. 3 - разрез по Б-Б на фиг. I; на фиг. 4 - разрез по В-В на фиг. 1; на фиг. 5 - разрез по Г-Г на фиг. 1; на фиг. 6 - разрез по Д-Д на фиг. 2; на фиг. 7 - разрез по Е-Е на фиг. 1.
Устройство для укладки изделий состоит из станины 1 с кулачковым валом 2, подающего приспособления, укладочной головки, включающей корпус 3, штанги-рейки 4, каретки 5 с вакуумными захватами 6 и зубчатыми рейками 7 и 8, механизм 9 уп|равления каретками и механизмы 10 и 11 привода зубчатых реек 7 и 8.
Подающее приспособление включает транспортер 12 для подачи укладываемых изделий и транспортер 13 для подачи открытых коробок 14.
Корпус укладочной головки состоит из боковин 15 и 16, стянутых планками 17.
На боковинах укреплены ве|ртикальные стержни с роликами 18, которые опираются на кулачки 19, посаженные на кулачковом валу 2.
Вакуумные захваты состоят из - рубки 20, эластичной насадки 21, кольца 22 с выступом 23, зубчатых секторов 24 и 25, пружины 26, гаек 27 и гибкой трубки 28. Кольцо 22 и секторы 24 и 25 жестко закреплены на Т1рубке 20. Гибкая трубка 28 соединена с вакуумной системой (на чертеже не показана).
Каретка 5 имеет отверстия для трубок 20 вакуумных захватов б, количество которых в каждой каретке может быть любым заданным, и борт 29. К каретке болтами 30 с пружинами 31 поджимаются рейки 7 и 8, в которых выполнены для них продольные пазы. На одном из концов каждой рейки закреплен штырь 32.
Механизм 9 поворота вакуумных захватов выполнен в виде смещенных один относительно Д|ругого зубчатых секторов 33, свободно насаженных на оси 34 и находящихся в зацеплении со штангами-рейками 4. Каждый зубчатый сектор 33 шарнирно соединен с тягой 35. Второй шарнир 36 тяги 35 закреплен в пазу 37 пласткны 38, подвижной вокруг оси 39. Криволинейный паз 37 имеет радиус кривизны, равный расстоянию между шарнирами тяги 35, и проходит через ось 39. Количество пластин 38 соответствует количеству штанг-реек 4. Пластины 38 между собой и с пластинками 40 жестко соединены стяжками 41, причем пластинки 40 имеют шипы 42 и 43, образующие вал, ось которого совпадает с осью 39. Шппы 42 и 43 входят в отверстия боковины 15, при этом шип 42 выступает за боковину. На его выступающем конце жестко насажено коромысло 44, шарнирно соединенное через шатун 45 с двуплечим рычагом 46, которое под действием пружины 47 РОЛИКОМ 48 взаимодействует с кулачком 49, насаженным на кулачковом валу 2.
Каждая штанга-рейка 4 жестко соединена со своей кареткой штифтом 50.
В каретках имеются отве|рстия 51 и 52 для штанг-реек 4, причем первое выполнено овальным с боковым зазором для штанг-реек, а второе - увеличенного диаметра с кольцевым зазором.
Механизмы 10 и 11 привода реек 7 и 8 включают двуплечие рычаги 53 с пазами 54 для штырей 32, которые (рычаги) свободно установлены «а осях 55. Вторыми плечами рычаги 53 шарнирно соединены че|рез тяги 56 с пластинами 57, при этом второй шарнир 58 тяги 56 закреплен в криволинейном пазу 59 пластины 57. Наз 59 имеет радиус кривизны, равный расстоянию между шарнирами тяги 56, ипроходит через ось 60 качания пластины 57, которые соединены € пластинами 61 стяжками 62. Пластины 61 имеют шипы 63 и 64, образующие вал, ось которого совпадает с осью 60. На втором конце шипа 63 механизма 11 закреплено коромысло, соединенное тягой 65 с двуплечим коромыслом 66 механизма 10, которое вторым плечом через шатун 67, двуплечий рычаг 68 и ролик 69 под действием пружины 70 взаимодействуют с кулачком 71, закрепленным на валу 2. Для пе|ремешения каждой рейки 7 и 8 служат соответственно рычаги 53, тяги 56 и пластины 57.
Подающее приспособление кинематически связано с кулачковым валом 2, от которого получает прерывистое движение.
Устройство работает следующим образом.
После остановки транспорте|ра 12 корпус 3 с каретками 5 и вакуум-захватами 6 под действием кулачков 19 опускается так, что вакуум-захваты соприкасаются с изделиями, находящимися на транспортере. Затем с помощью клапанных приспособлений (на чертежах не показаны) вакуум-захваты 6 через трубки 28 соединяются с вакуум-системой, благодаря чему они захватывают изделия. После этого корпус 3 поднимается, и коромысло совершает рабочее перемещение путем качания от кулачка 71 через шатун 67. Благодаря тяге 65 аналогичное качание сове|ршает также коромысло 72.
При перемещении коромысел 66 и 72 пластины 57 поворачиваются вокруг оси 60. При этом под действием тяги 56 поворачиваются на осях 55 рычаги 53, которые через пазы 54 и штыри 32 перемещают рейки 7 и 8 в горизонтальной плоскости. Рейки 7 и 8 перемещаются навстречу одна другой, поворачивая те вакуум-захваты, которые своими секторами 24 и 25 находятся в зацеплении с рейками 7 и в. В зависимости от того, с какой рейкой соединен через соответствующий сектор 24 или 25 вакуум-захват 6, он поворачивается по часовой стрелке или против нее. Если у вакуум-захвата ни один из секторов не сцеплен с рейками, то вакуум-захват с изделием поворачивается вок|руг вертикальной оси.
После изменения положения в горизонтальной плоскости продольных и поперечных осей изделий с вакуум-захватами 6 каретки 5 со штангами-рейками 4 перемещаются и переносят изделия в положение над коробками, установленными на транспортере 13. Каждая каретка 5 при этом перемещается на определенное расстояние с тем, чтобы не только переносить изделия, но и изменить расстояние между рядами изделий, захваченных соседними каретками.
Для перемещения кареток 5 движение передается от кулачка 49 через рычаг 46, шатун 45, коромысло 44, пластины 38, тяги 35, зубчатые секторы 33 и штанги-рейки 4. При этом штыри 32 реек 7 и 8 выходят из пазов 54 рычагов 53, но рейки не изменяют своего положения по отношению к «аретке 5, будучи прижаты к ней болтами 30 с помощью пружин 31.
Затем корпус 3 движется вниз под действием кулачка 19 и опускает изделия в коробку, после чего вакуум-захваты 6 отключаются от вакуумной сети, и корпус 3 поднимается вверх, оставляя изделия в коробке.
Далее все механизмы приводятся от своих кулачков в исходное положение в следующем порядке: совершают обратный ход штангирейки 4 с каретками 5 и вакуум-захватами 6 (при этом штыри 32 входят в пазы 54); рейки 7 и 8 поворачивают вакуум-захваты, транспортер 12 подводит под корпус 3 следующую порцию укладываемых изделий, а транспорTeip 13 отводит наполненную и подводит пустую коробку.
В дальнейшем цикл повторяется.
Для изменения величины перемещения каждой каретки 5 меняют положение шарнира 36 тяги 35 в пазу 37. Если положение шарниpa 36 совпадает с осью 39, то в дальнейшем при рабочем ходе коромысла 44 соответствующая штанга-рейка 4 с кареткой 5 остается неподвижной. Чем дальше от оси 39 будет закреплен шарнир 36, тем большим будет ход каретки. Для расположения пранспортеров 12 и 13 различным образом по отношению к корпусу 3 шарнир 36 закрепляется в пазу 37 с другой стороны от оси 39 при рабочем ходе коромысла 44, при этом каретка 5 перемещается в противоположную сторону.
При перемене положения шарниров 36 в пазах 37 для изменения хода кареток 5 их исходное положение не меняется вследствие того, что положение второго шарнира тяги 35 совпадает с центром окружности, частью которой является ось криволинейного паза 37, а радиус этой окружности равен расстоянию между шарнирами тяги 35.
Аналогично регулируется ход реек 7 и 8 и, соответственно, величина поворота вокруг вертикальной оси вакуум-захватов 6: изменяется положение шарниров 58 тяг 56 в пазах 59 пластин 57. При совпадении полбжения шарнира 58 с осью качания пластины 57 соответствующая рейка при перемещении коромысел 66 и 72 остается неподвижной.
Для подключения к рейкам 7 и 8 соответствующего вакуум-захвата 6 он вручную оттягивается вниз, сжимая пружину 26, и поворачивается так, что в зацепление входит сектор 24 или 25.
Для отключения вакуум-захвата 6 от реек он поворачивается так, что секторы 24 и 25 выходят из зацепления с рейками, а кольцо 22 своим выступом 23 входит в соприкосновение с бортом 29 каретки 5, фиксируя тем самым положение вакуум-захвата.
Предмет изобретения
Устройство для укладки изделий в коробки, например конфет, включающее подающее приспособление, укладочную головку с вакуумными захватами, укрепленными на каретках, имеющих возможность возвратно-поступательного перемещения, механизм поворота вакуумных захватов вокруг вертикальной оси и механизм управления, отл и ч а ющееся тем, что, с целью повыщения надежности устройства в работе, механизм поворота вакуумных захватов выполнен в виде смещенных один относительно другого зубчатых секторов, закрепленных на трубках вакуумных захватов, при этом последние связаны с подвижно укрепленными зубчатыми рейками, а привод кареток выполнен в виде штанги с зубьями, взаимодействующими с механизмом управления через зубчатый сектор.
Фиг 7 17 J 3 6В.
69 51 71 19 Фиг I 51 3
Фиг J
Фиг. V
Фиг 5
Д-Д
53
28
b (4;
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1980 |
|
SU967929A1 |