1
Изобретение относится к кондитерскому производству, а именно к машинам для укладки штучных изделий в коробки, например конфет типа «Ассорти.
Известна машина для укладки штучных изделий в коробки, состояш:ая из плиты, укрепленной на вертикальном -валу и совершаюшей прерывистое движение, головок с вакуумными захватами, установленными с возможностью перемеш ения в вертикальной плоскости, и транспортируюших устройств.
Цель изобретения - выемка штучных изделий непосредственно из отливочных форм и укладка их в коробки.
Для этого предлагаемая машина снабжена укрепленными на плите держателями для форм, площадками, снабженными вакуумными захватами и расположенными на плите между держателями с возможностью поворота вокруг горизонтальной оси, жестко укрепленными на стержнях столиками для коробок, имеюшими боковые ограждения и установленными под каждой плош,адкой с возможностью возвратно-поступательного движения в вертикальной плоскости, « приспособлениями для фиксации форм и коробок.
Держатели для форм выполнены в виде жестко смонтированных на плите пла-нок, имеюш,их пазы П-образной формы.
Кроме того, каждое приспособление для фиксации форм и коробок выполнено в виде качающегося подпружиненного рычага, приводимого в движение от копира.
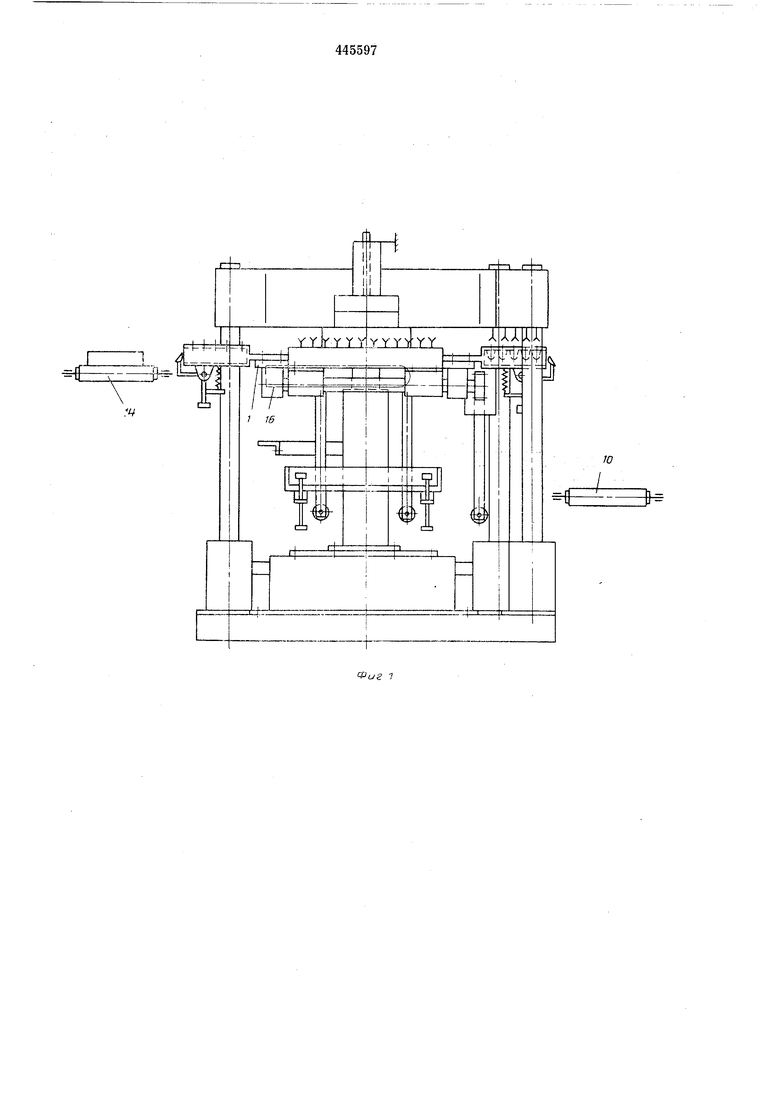
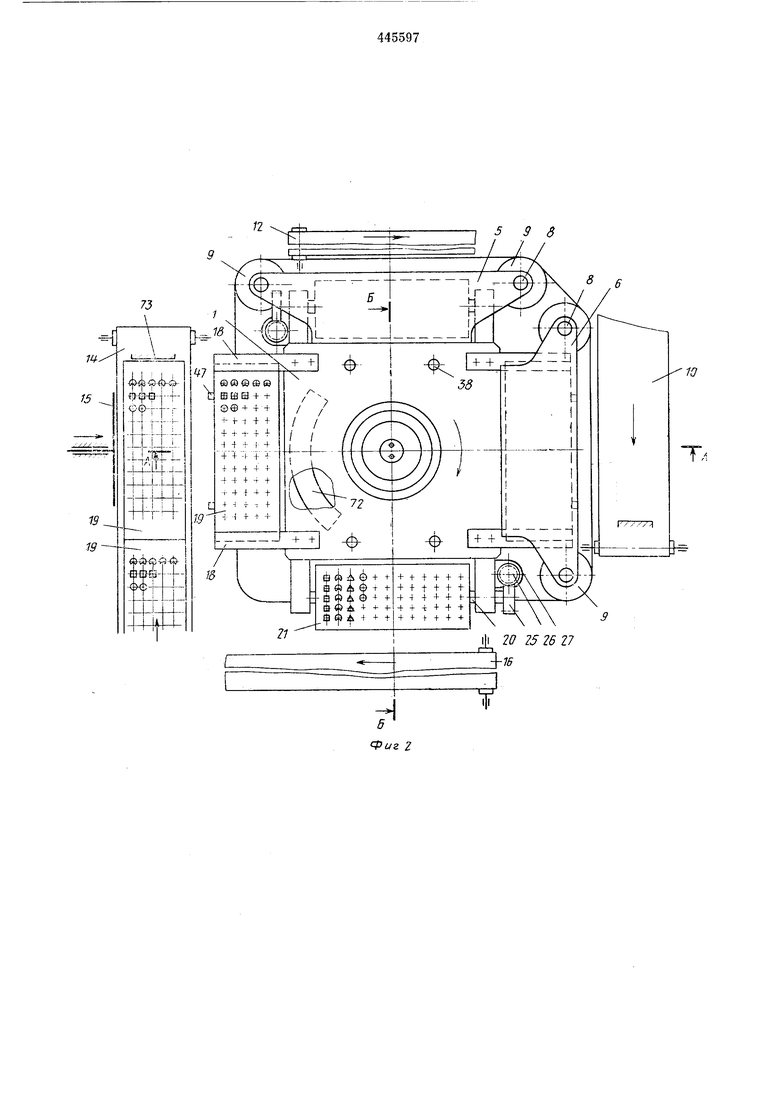
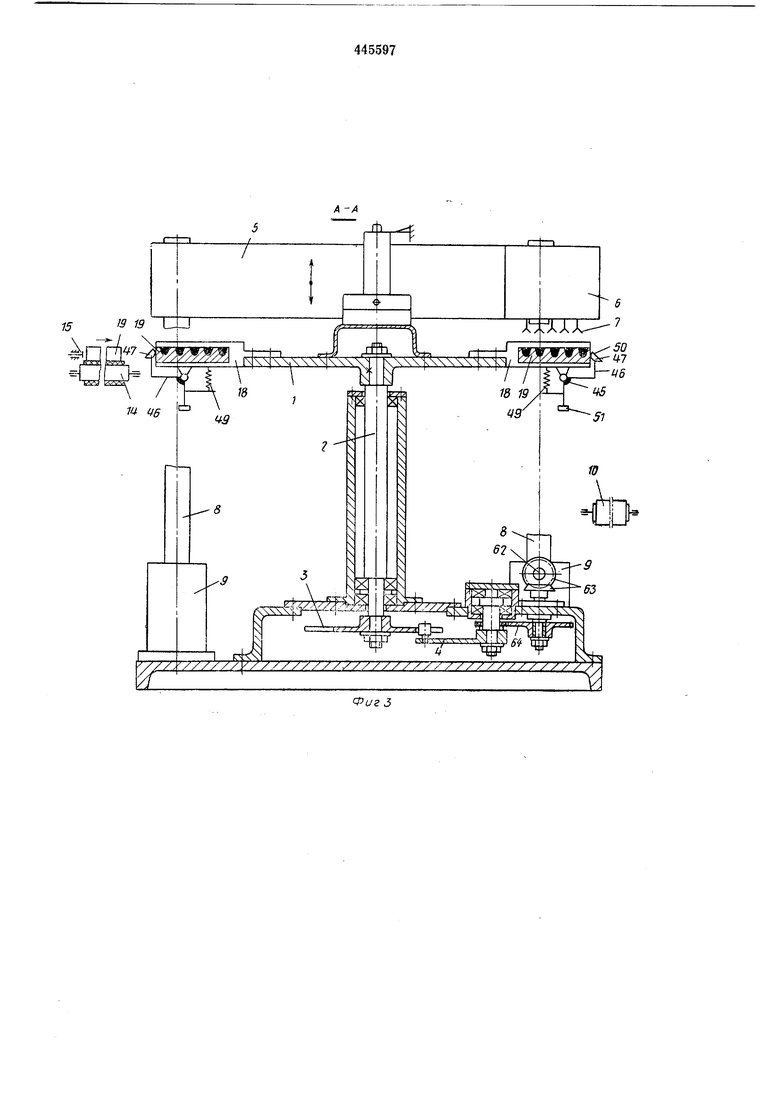
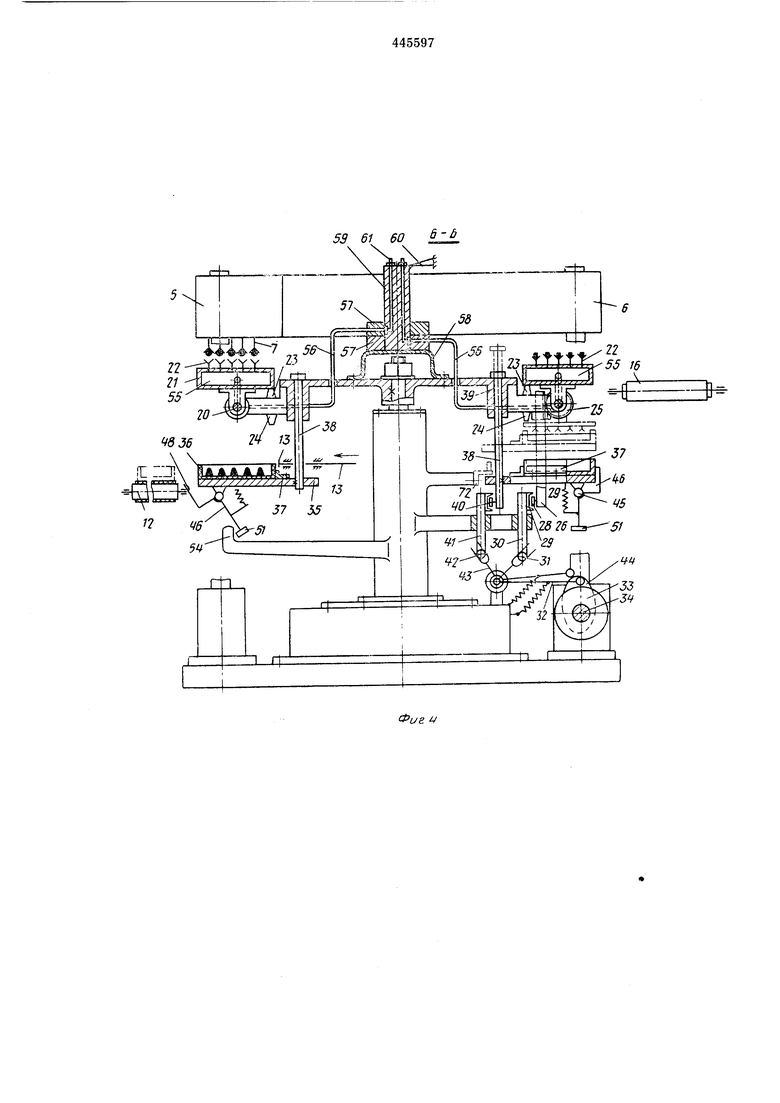
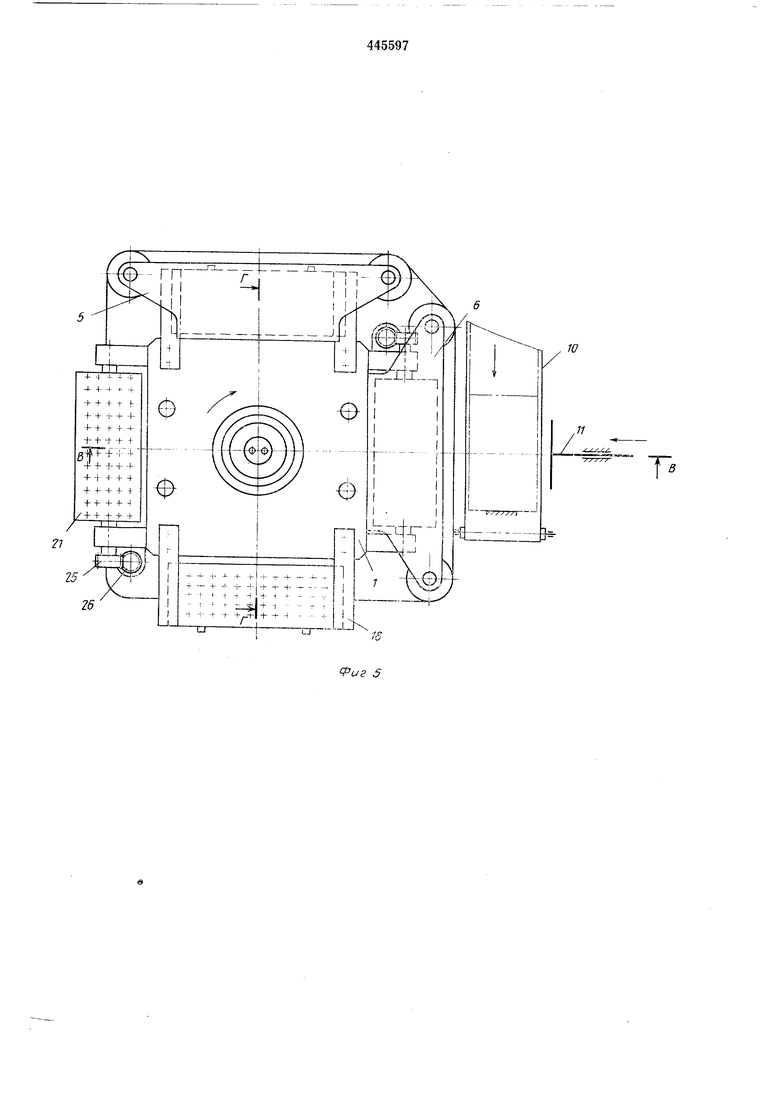
На фиг. 1 схематически изображена предлагаемая машина, вид спереди; на фиг. 2 - то же, сверху; на фиг. 3 - разрез по А-А на фиг. 2; на фиг. 4 - разрез по Б-Б на фиг. 2; на фиг. 5 - машина после поворота
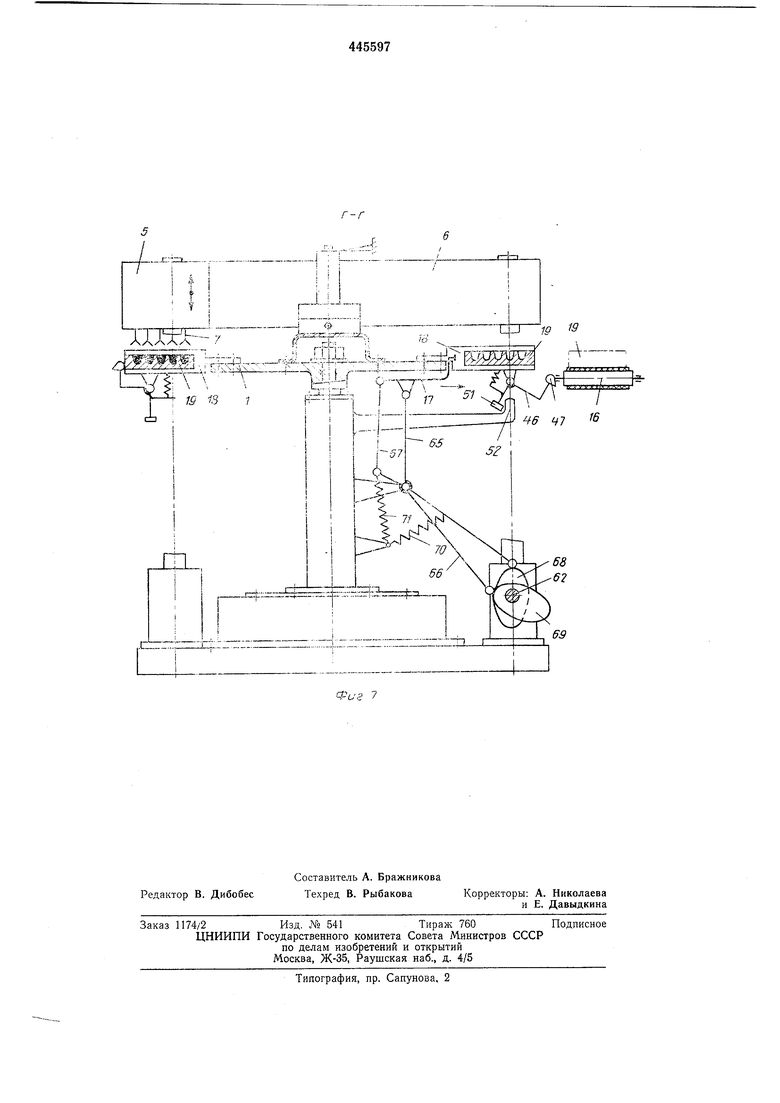
плиты на 90°, вид сверху; на фиг. 6 - разрез по В-В на фиг. 5; на фиг. 7-разрез по Г-Г на фиг. 5.
Мащина содержит плиту 1, укрепленную на вертикальном валу 2 (фиг. 3) с мальтийским
крестом 3, приводимым в движение от кривошипа 4, головок 5 и 6 с вакуумными захватами 7, установленными на стойках 8 с возможностью перемещения во втулках-направляющих 9 в вертикальной плоскости, транспортер
10 и толкатель 11 для подачи и ввода пустых коробок в машину, транспортер 12 и толкатель 13 для вывода наполненных коробок, транспортер 14 и толкатель 15 для подачи форм с изделиями в машину, транспортер 16
и толкатель 17 для вывода опорожненных форм из машины.
Держатели 18 для форм выполнены в виде жестко смонтированных на плите 1 планок, имеющих П-образные пазы для форм 19 с
конфетами. На горизонтальных валиках 20 жестко установлены площадки 21 с вакуумными захватами 22. Площадки 21 в верхнем положении онираются на уноры 23, а в нижнем ноложении - на уноры 24 нлиты 1.
На валике 20 носажена реечная шестерня 25, связанная с рейкой 26, установленной на кронштейне 27. На конце рейки закренлен ролик 28, нернодкчески перед остановкой ротора входящий в наз 29 ползуна 30, нриводимого в возвратно-ностунательное движение в вертикальной плоскости через ролик 31 двунлечнм рычагом 32 от кулачка 33, носаженного на кулачковом валу 34.
Под каждой нлощадкой 21 находятся столики 35 для коробок 36 с боковыми ограждениями 37. Столикн закреплены на стерн нях 38, установленных в отверстиях выстунов 39 плиты 1. На одном из стержней расположен ролик 40, входяихий в назы ползуна 41, на котором имеется ролик 42, связанный с двуплечим рычагом 43, взаимодействующим с кулачком 44.
Формы 19 удержнваются в держателях 18, а коробки 36 - на столике 35 ограждения приспособлениями в виде установленных на осях 45 двунлечнх рычагов 46 с упорами 47 и 48 и пружинами 49.
Упоры 47 нмеют наклонную поверхность 50. На втором плече рычагов 46 установлены ролики 51, взаимодействующие с неподвижными колирами 52, 53 н 54.
Площадки 21 имеют полость 55, с которой соединены вакуум-захваты 22. Полости 55 щлангами 56 связаны с золотником 57, установленным на кронштейне 58, закрепленном на плите 1. В золотнике 57 подвижно установлен стержень 59, удерживаемый от вращения кронштейном 60. Стержень 59 связан щлангами 61 с ва,куумной коммуникацией (на чертежах не показана).
Кулачковый вал 34 кинематически связан с кулачковым валом 62, который конической зубчатой передачей 63 и цилиндрической зубчатой передачей 64 связан с кривощипом 4.
Каждый нз толкателей 11, 13 и 15 связан с кулачковым валом 34, а толкатель 17 - рычагами 65 и 66, тягой 67 и кулачками 68 и 69.
К кулачкам рычаги поджимаются пружинами 70 и 71. Столик 35 в верхнем положении удерживается копиром 72, нрнмыкающим к пазу ползуна 41 и установленным под плитой 1.
По транспортеру 14 (фнг. 2 и 3) к машине подаются отливочные формы 19 с изделиями, они подходят к неподвижному упору 73. Толкатель 15, приводимый от кулачкового вала 62, во время выстоя плиты 1 подает форму в держатели 18. При этом форма заходит на наклонные поверхности упоров 47, в связи с чем рычаг 46 поворачивается вокруг оси 45 н утапливает упоры 47 иод форму 19.
Затем форма входит в держатели 18 до упора в их торцовые стенки, после чего рычаг 46 под действием пружины 49 возвращается в
исходное положение, поджимая и фиксируя форму 19 в держателях 18 и препятствуя ее смещению в радиальном направлении. После выстоя плита 1 с валом 2 мальтийским крестом 3 и кривошипом 4 поворачивается на 90° по часовой стрелке и располагается над головкой 5 (фиг. 5), при этом площадка 21 перемещается па место, занимаемое до поворота держателя.ми 18 с формой 19. При этом
выетое головка 5 онускается к форме 19, и вакуум-захваты 7 захватывают часть конфет. После этого головка 5 поднимается вверх с вакуум-захватами и конфетами, извлекая их из формы, последние перемещаются в горизонтальной плоскости в головке до заданного расстояния.
При следующем новороте плиты 1 на 90° под головку 5 подходит площадка 21 с вакуум-захватами 22, к транспортеру 14 - держатели 18, а держатели с формой 19, ранее находивщиеся под головкой 5, - под головку 6. Головка 6 опускается и извлекает оставщуюся часть конфет из формы 19 с носледующим неремещением их в горизонтальной плоскости,
как это описано выше для головки 5.
Одновременно головка 5 с конфетами опускается, при этом конфеты ложатся на вакуум-захваты 22 площадки 21. Затем с помощью клапанных механизмов вакуум-захваты 7
отключаются от вакуумной коммуникации, а вакуум-захваты 22 подключаются к ней, после чего головка 5 поднимается. При этом изделия захватываются вакуум-захватами 22 площадки 21. Во время этого же выстоя плиты 1 в держ;атели 18 подается форма 19.
После поворота плиты на 90° держатели 18 с формами 19 и площадки 21 с вакуум-захватами 22 по отношению к транспортерам снова будут в положении, показанном на фиг. 5.
При подходе к этому положению плиты 1 копир 52 отводит рычаг 46 с упорами 47 от формы 19. При выетое плиты 1 толкатель 17 под действием рычага 65 и кулачка 68 выталкивает форму 19 из держателей 18 на транспортер 16. При обратном ходе толкателя 17 рычаг 66 под действием кулачка 69 через тягу 67 опускает толкатель ниже уровня плиты 1. Головка 6 (фиг. 6) при этом же выетое плиты 1 опускает на площадку 21 с вакуум-захватами 22 укладываемые изделия (вторую их часть), и на нлощадке 21 собирается полный комплект изделий, отлитых в одной форме. При этом же выетое плиты 1 на столик 35
(фиг. 5 и 6) толкателем И с транспортера 10 подаются пустые коробки. До этого момента при подходе плиты к положению выстоя рычаг 46 отводится от столика 35 копиром 53. В начале очередного поворота ролик 51 сходкт с копира 53, и рычаг 46 под действием пружины 49 прижимает упором 48 коробку 36 к ограждению 37.
При следующем повороте на 90° плита I занимает ноложеиие, показанное на фиг. 2
После остановки плиты 1 ползун 30 посредстBOM рычага 32 и кулачка 33 через паз 29 и ролик 28 перемещает рейку 26 в верхнее положение. При подъеме последняя поворачивает шестерню 25 с валиком 20 на 180°, вследствие чего площадка 21 переворачивается вакуум-захватами 22 до прижима в упор 24 (локазаио штрихпунктиром на фиг. 4). Затем к площадке 21 поднимается столик 35 с коробкой 36, при этом движение передается от кулачка 44 через рычаг 43, ролик 42, ползун 41, ролик 40 и стержень 38, после чего вакуум-захваты отключаются от вакуумной коммуникации, освобождаясь тем самым от изделий. В начале поворота плиты 1 ролик 40 выходит из паза ползуна 41 и находит на неподвижный копир 72, удерживающий столик 35 в верхнем положении. В дальнейшем ползун 41 опускается в исходное положение. Затем после поворота плиты в положение, показанное на фиг. 5, столик 35 с коробкой 36 опускается в нижнее положение (фиг. 6) и удерживается головками стержней 38, которые упираются в плиту 1. После опускания столика 38 площадка 21 поворачивается на 180° до подхода к упору 23. При следующем повороте плиты 1 копир 54 отводит рычаг 46 с упорами 48 от коробки, а толкатель 12 выталкивает заполненную коробку на транспортер 12, и на площадку 21 с вакуум-захватами 22 головкой 5 передается очередная партия изделий. 6 Предмет изобретения 1. Машина для укладки штучных изделий в коробки, состоящая из плиты, укрепленной на вертикальном валу и совершающей прерывистое движение, головок с вакуумными захватами, установленными с возможностью перемещения в вертикальной плоскости, и транспортирующих устройств, отличающаяся тем, что, с целью выемки изделий, например конфет типа «Ассорти, непосредственно из отливочных форм и укладки их в коробки, она снабжена укрепленными на плите держателя.ми для форм, площадками, снабженными вакуумными захватами и расположенными на плите между держателями с возможностью поворота вокруг горизонтальной оси, жестко укрепленными на стержнях столиками для коробок, имеющими боковые ограждения и установленными под каждой площадкой с возможностьювозвратно-поступательного движения в вертикальной плоскости, и приспособлениями для фиксации форм и коробок. 2. Машина по п. I, отличающаяся тем, что держатели для форм выполнены в виде жестко смонтированных на плите планок, имеющих пазы П-образной формы. 3. Машина по п. 1, отличающаяся тем, что каждое приспособление для фиксации форм и коробок выполнено в виде качающегося подпружиненного рычага, приводимого в движение от копира. Г I iK + + -Ь + + t + + + + + + + + t + -ь + 4 + 4- + t- + + + III 20 25 26 27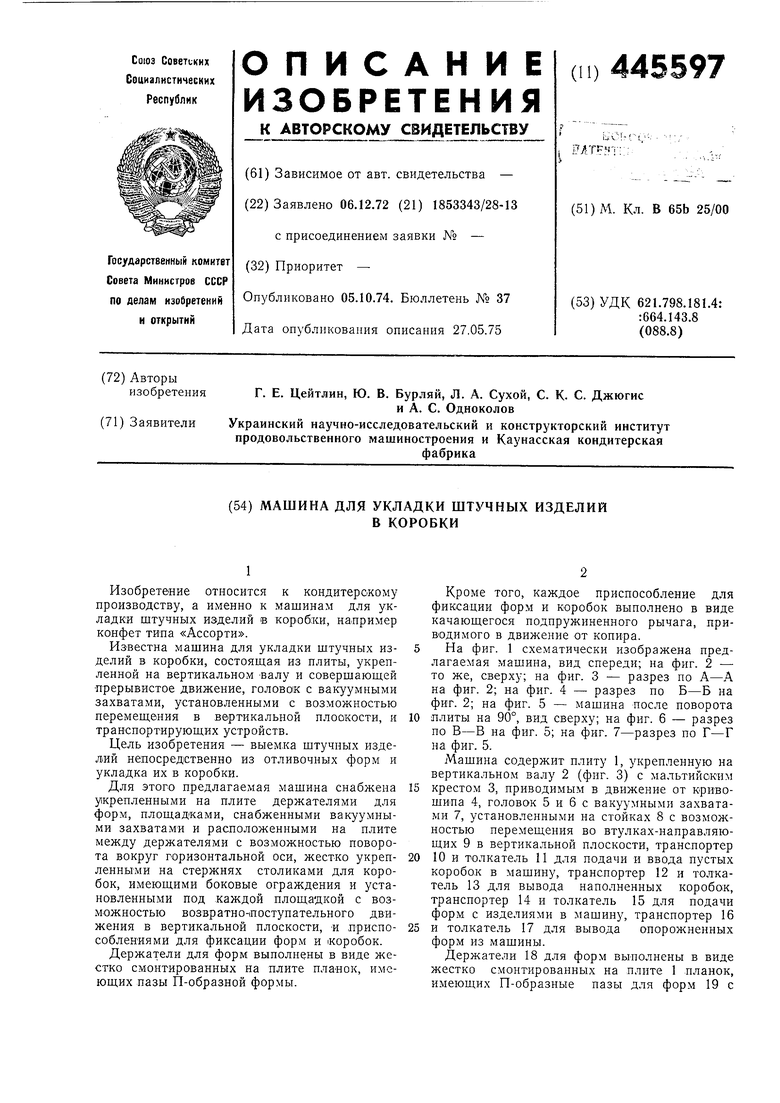
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для укладки штучных изделийВ КОРОбКи | 1979 |
|
SU846406A2 |
| Машина для укладки штучных изделий в коробки | 1977 |
|
SU676499A2 |
| МАШИНА ДЛЯ УКЛАДКИ В КОРОБКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1967 |
|
SU206379A1 |
| Автомат для сборки коробок | 1990 |
|
SU1735047A1 |
| УСТРОЙСТВО для УКЛАДКИ в КОРОБКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1969 |
|
SU257331A1 |
| Устройство для укладки штучныхиздЕлий B КОРОбКи | 1978 |
|
SU839865A1 |
| Устройство для укладки в коробки штучных предметов | 1972 |
|
SU440304A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Установка для упаковки продуктов в картонные коробки | 2020 |
|
RU2730764C1 |
| УСТРОЙСТВО для РАСФАСОВКИ МЕЛКОКУСКОВЫХ ШТУЧНЫХ ИЗДЕЛИЙ В КОРОБКИ И ИХ ЗАКЛЕЙКИ | 1969 |
|
SU239842A1 |

5 Фиг 2
Т
fpue 5 CJ J
