Изобретение относится к машиностроению и может быть использовано в промыш- леннь Х роботах.
Цель изобретения - повышение быстродействия механизма и упрошение системы управления.
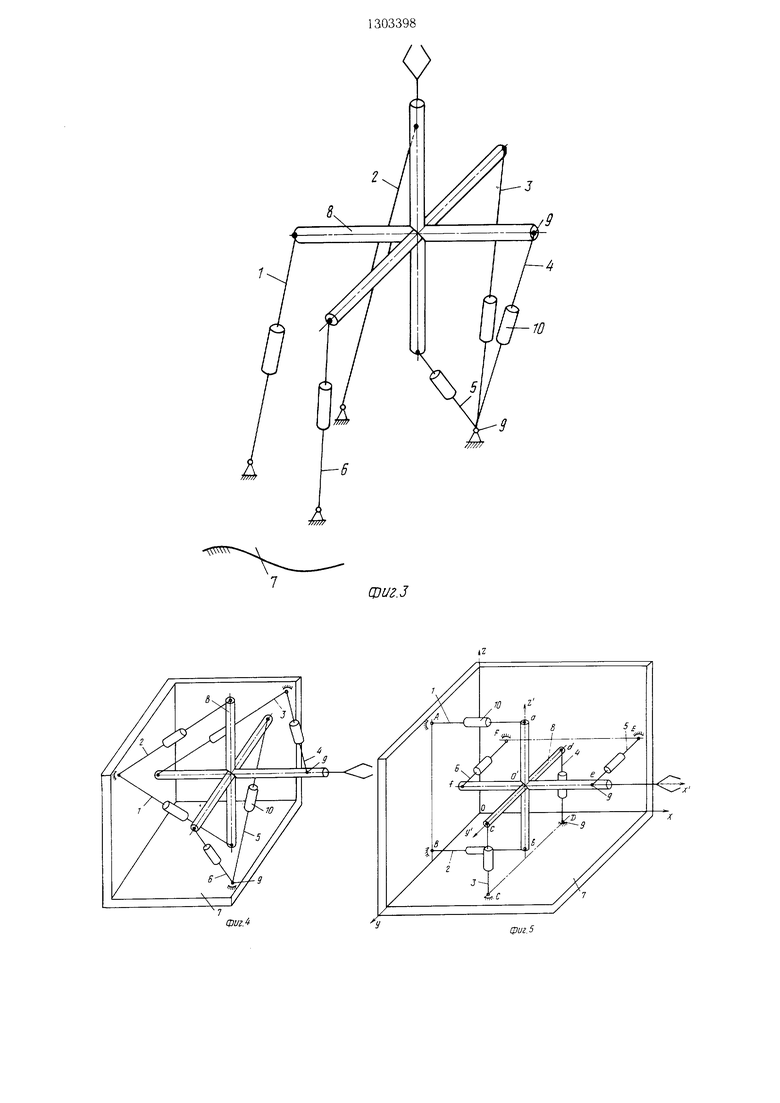
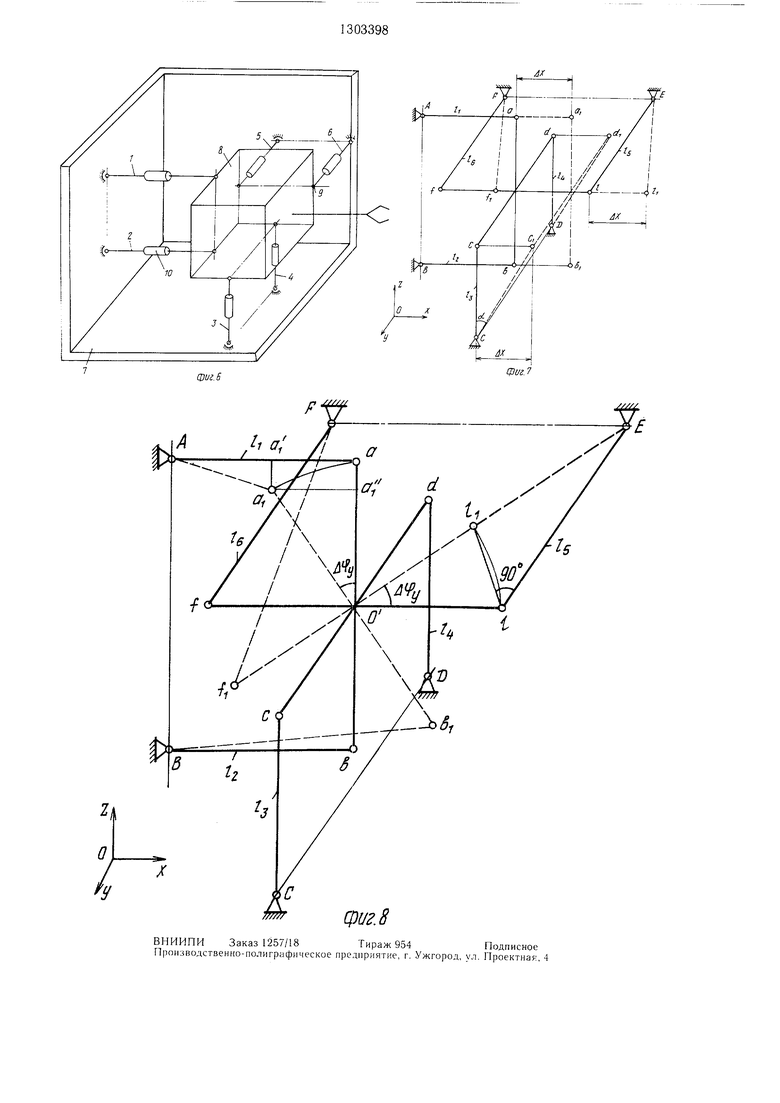
На фиг. 1-4 изображены кинематические схемы механизма, у которого центры шарниров на выходном звене расположены парами на трех взаимно перпендикулярных прямых, варианты; на фиг. 5 и 6 - кинема- тические схемы механиз.ма, у которого центры шарниров основания расположены парами на трех прямых, скрещивающихся под пря.мыми углами, варианты; на фиг. 7-8 - расчетные схемы.
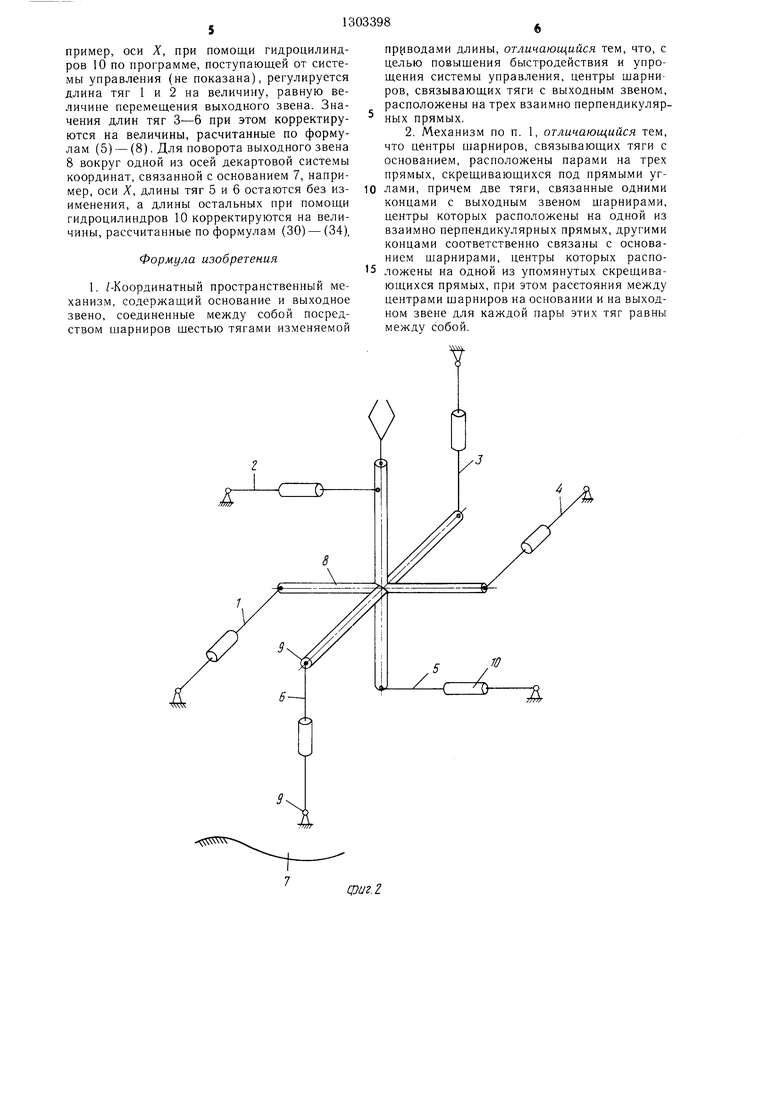
Е-координатный пространственный механизм (фиг. 1-6) содержит шесть тяг 1-6, связанных с основание.м 7 и выходным звеном 8 посредством сферических шарниров 9. Длины тяг I-6 регулируются приводами 10, например пнев.мо- или гидроцилиндрами. Тяги 1-6, основание 7 и выходное звено 8 при данных (текущих) значениях длин тяг образуют геометрически неиз.меняемую структуру, а совокупность длин тяг и их расположение однозначно характеризуют расположение выходного звена относительно основания, приче.м ни одна из этих тяг не может быть изъята без нарушения работоспособности механизма.
Пусть координаты выходного звена в сие-
теме координат OXYZ в исходном положе- НИИ равнь (фиг. 5): Хо 1|, УО Is; Zo 1з; ф,0,
где (рх - угол между осями Л и X;
ф,, - - угол между осями У и У ,
Ф; -угол между ося.ми Z и Z .
Если требуется переместить выходное звено в пространстве из исходного положения, так, чтобы его координаты получили при ращения &Х, uY, AZ, л фх , д (f у , Acpz, длинам тяг даются следующие приращения
Л1| Alf+ Л1Г+ Alf+Air
Л12 Л11+ л1 +А1Г +л11 +л1Г; л1.. л1 +л1|+л1 +л1- /+л1 /+л1Г;
33353a.j
Л1., А1НАН + Ai:+Al-; +Alf+Alf; Al.. . +Alf+Al- +AP/; А1б , +А Г+А17+А1Г;
где 1, Ц,..., - величины коррекции длин соответствующих тяг при перемещении выходного звена из исхОд ного положения вдоль оси X на величину АХ; Ij, 12...,1б- величины коррекции длин соответствующих тяг при не- ре.мещении выходного звена из исходного положения вдоль оси Y на величи-
,. . Ь, I2,...,i6- величины коррекции длин
соответствующих тяг при пе
IГ
If. 11
5
5
j
О
0
(-
0
ремещении выходного звена из исходного положения вдоль оси Z на величину AZ. 1г ,--.,1Г- величины коррекции длин соответствующих тяг при повороте выходного звена вокруг оси X из исходного положения на величину If ,..., величины коррекции длин соответствующих тяг при повороте выходного звена вокруг оси Y из исходного положения на величину Афч, Ij - величины коррекции длин соответствующих тяг при повороте выходного звена вокруг оси Z из исходного положения на величину Аф. Определяют значения слагае.мых в формуле (1) для механизма, изображенного на фиг. 5. Для перемещения выходного звена этого механизма вдоль оси X на величину АХ необходимо (фиг. 7) длины тяг 1 и 2 изменить на величину
д1 д1, ДА-(2)
При этом длины остальных тяг необходимо скорректировать на величины, значения которых определяют в явном виде. Величина коррекции длины, напри.мер, тяги 3 (фиг. 7).
А I ;f СС 1 - СС СС 1 - I:.(3)
Из ACcci следует
V(cc,)-4 (Сс)- д/ (А)- + 1з
(4;
0
0 5
А1. У|зЧ А А--- 1з;
5
Alf / U+ АХ - ,
All -/l5-f АХ - 1.5; А1б V i + ДРз Д1| ДУ;
le;
All
Д1 д Ь +ДУ ДРз Л/1з + АУ
5
ДЦ л/lt + АУ- - Д15 Д1 ДZ;
дlf -ylf + д/ 15 + U
ig.
(5) (6)
(7) (8)
(9)
(10)
(11)
(12)
(13) (14) (15) (16) (17) (18)
Для поворота выходного звена механизма вокруг одной из осей Я, У, Z необходимо длины тяг, связывающих центры шарниров, расположенных на прямых, параллельных
данной оси, оставить без изменения. Длины остальных тяг необходимо скорректировать на величины, значения которых определяются аналитически в явном виде. Например, при повороте выходного звена вокруг оси Y на угол Лф// длины тяг 3 и 4 (фиг. 8) не изменяются:
.(19)
Величина коррекции длины тяги 5; Alf El|-El Е1,-1.5.(20)
Из AEeie следует
Ее, V(Ee) + (ее,) л/ЬЧ (ее,) (21)
Длина хорды eei определяется из соот- ,,
ношения:
а;а al a O a- O и подстановке (25) н (26
eei 2(O e)sin
Лфу
(22)
Из (21) и (22) и (20) определяется Alf Vl5+4(0 e) (23)
Аналогично:
Величина коррекции длины тяги 1 д1- ;- .-(Аа,- Аа) -(Да,---,) (24 Из дАаьЛ определяется Aai V (Aa i)-+ (a,al)(25)
Из aO oia определяется aia , O ai sinA(p,, O a sinAqi,: (26)
O a j O ai cosAq y O a cos Дф.
При
,,
aia, ;
а;а al a O a- O aj . и подстановке (25) н (26) в (24) получается
АЬГ - Vl2+2(O b)--2(0 h) X
X (l2-siiiAcf,,+ O b cos Аф;,) - li . (27)
| название | год | авторы | номер документа |
|---|---|---|---|
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| Прибор для вычерчивания кривых второго порядка | 1980 |
|
SU925682A1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1441123A1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| Цепная передача | 1986 |
|
SU1567828A1 |
| Способ получения взрывной эмиссии | 1972 |
|
SU490206A1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЯРИМОВА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 2001 |
|
RU2202702C2 |
| Устройство для копирной обработки асферических поверхностей | 1981 |
|
SU986737A1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2498376C2 |
| Шестикоординатный вибростенд | 1990 |
|
SU1753322A1 |
Изобретение относится к области машиностроения и .может быть использовано в конструкциях промышленны.х роботов. Целью изобретения является повышение быстродействия и упрощение системы управления. В механизме, содержащем тяги I, 2, 3, 4, 5 и 6, связанные с основанием 7 и выходным звеном 8 посредством сферических шарниров 9, для достижения этой цели центры шарниров, расположенных на выходном звене, расположены парами на трех взаимно перпендикулярных прямых. Кроме того, центры njapHnpOB оснонания расположены парами на трех прямых, скрещивающихся под прямыми углами. I з.п. ф-лы, 8 ил. (Л 4 со о 00 со со оо CpUf.l
- Vl3+ 2(О с)--- 2(О с))(1:, sin O ccos дф)
Л/ 15+ 2(O d) 2(O d) (U sin АФЛ+ O d соЗАф
д1-- д1-;- 0;(34)
0;(35)
(36)
; (37)
V 2(O,e)- 2(Oie) (l5SinAф.+ О есо8Д(рг) 1-. Vls+ 2(0 f)--2(0,f)(l«siпдф,-f O f со8Д((,)
,.
- 1- n
Alr Vl +4(0 c) 1;,; A y Vl4+4(0 d)4in-2 A ф.I,.):
--2 A ф.1«
38) (39)
Аналогичные зависимоспи выводятся и для кинематических схем, показанных на фиг. 1-4 и 6.
Из формулы (2), (5) - (19), (23), (27) - (39) следует, что при малых перемещениях и малых углах поворота выходного звена, например, при осуществлении сборочных операций в электронной промышленности значениями коррекций длин тяг можно пренебречь. В этом случае для перемещения выходного звена на какое-то расстояние вдоль одной из осей декартовой системы координат, связанной с основанием, например, оси X. дается приращение
длина.м только двух тяг (тяг 1 и 2). Для поворота выходного звена на какой-то yro. i вокруг одной из осей той же системы координат, например оси X. необходимо длины двух тяг (тяг 3 и 4) изменить в ные стороны (увеличить или уменьшить) на величину, рассчитанную по формулам, например, (32) и (33), а остальные длины тяг оставить без изменения.
В остальных случаях механизм работа- ет следующим образом.
Для перемещения выходного aiiena 8 вдоль одной из осей декартовой систем1)1 координат, связанной с основанием 7, например, оси X, при помощи гидроцилиндров 10 по программе, поступающей от системы управления (не показана), регулируется длина тяг 1 и 2 на величину, равную величине перемещения выходного звена. Значения длин тяг 3-6 при этом корректируются на величины, расчитанные по формулам (5) - (8). Для поворота выходного звена 8 вокруг одной из осей декартовой системы координат, связанной с Основанием 7, например, оси X, длины тяг 5 и 6 остаются без из- именения, а длины остальных при помощи гидроцилиндров 10 корректируются на величины, рассчитанные по формулам (30) - (34),
Формула изобретения
приводами длины, отличающийся тем, что, с целью повыщения быстродействия и упрощения системы управления, центры щарни- ров, связывающих тяги с выходным звеном, расположены на трех взаимно перпендикулярных прямых.
ТТтУ
фиг.1
Фиг.З
фиг А
фиг. 5
/
фиг.б
сригЛ
фиг. 8
ВНИИПИ Заказ 1257/18Тираж 954Подписное
Производственно-полиграфическое предириятие, г. Ужгород, ул. Проектнак, 4
| @ -Координатный пространственный механизм (его варианты) | 1984 |
|
SU1222538A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
