1
Изобретение относится к машинам и их элементам для автоматизации тех нологических процессов, в частности к вакуумным схватам с ориентирующими элементами.
Целью изобретения является расширение технологических возможностей за счет увеличения зоны ориентирования схвата.
На фиг.1 изображен вакуумный схват; на фиг ,2 - сеченн А-А на фиг. 1. ,- ..л:. / - - -
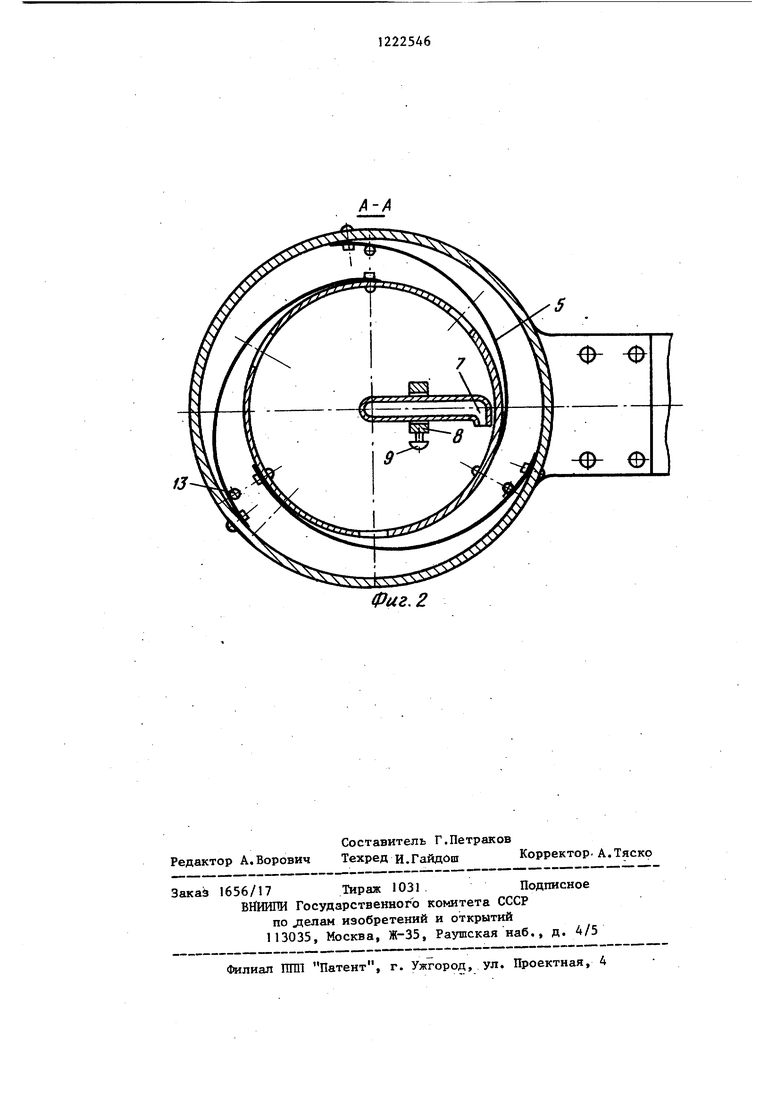
Вакуумный «xBfit содержит корпус в виде втулки 1, который крепится к исполнительному органу 2, например, промышленного робота. Внутри корпуса 1 помещен полый ориентирующий элемент 3 с закрепленной на нем вакуумной присоской 4. Корпус 1 и ориентирующий элемент 3 связаны между собой упругой подвеской в виде пластинчатых пружин 5, равномерно расположенных по окружности между корпусом I и ориентирующим элементом 3 по спирали. .В ориентирующем элементе, 3 на подшипнике 6 размещено вращающееся сопло 7 Г-образной формы с размещенным на его горизонтальной части грузом 8, фиксируемым винтом 9. К ориентирующему элементу 3 крепятся штуцера 10 и 11 для подвода воздуха к соплу 7 и создания разряжения с помощью эжекционного эффекта в полости присоски 4 соответственно. Для регулирования жесткости пружин 5 на корпусе 1 помещена гильза 12 с закрепленными на ней пальцами 13.
5
05
0
5
Схват работает следующим образом.
При перемещении схвата с удерживаемой деталью 14 к базовой поверхности 15 одновременно с командой на движение исполнительного органа 2 вниз в сопло 7 через штуцер 10 подается сжатый воздух. От действия истекающей струи сопло 7 приводится во вращательное движение, создавая колебания ориентирующего элемента 3 с деталью 14 в горизонтальной плоскости.
Частота вращения сопла 7 при этом определяется расходом (давлением) сжатого воздуха.
Величина амплитуды колебаний при работе с конкретной деталью регулируется величиной вылета груза 8 от оси вращения сопла 7.
При настройке захвата на детали других масс и типоразмеров величину поиска можно легко отрегулировать перемещением груза 8 на сопле 7 и изменением жесткости пружин 5 путем вращения гильзы 12 с пальцами 13 относительно корпуса захвата 1, т.е. изменением активной длины пружин 5.
Таким образом, благодаря тому, что вакуумный захват снабжен спиральными пружинами с регулируемой жесткостью, а вращающееся сопло - грузом с регулируемым вылетом относительно оси вращения сопла, получена возможность регулировать величину.амплитуды колебаний ориентирующего элемента 3 и тем самым расширить зону ориентации детали.
Фиг, 2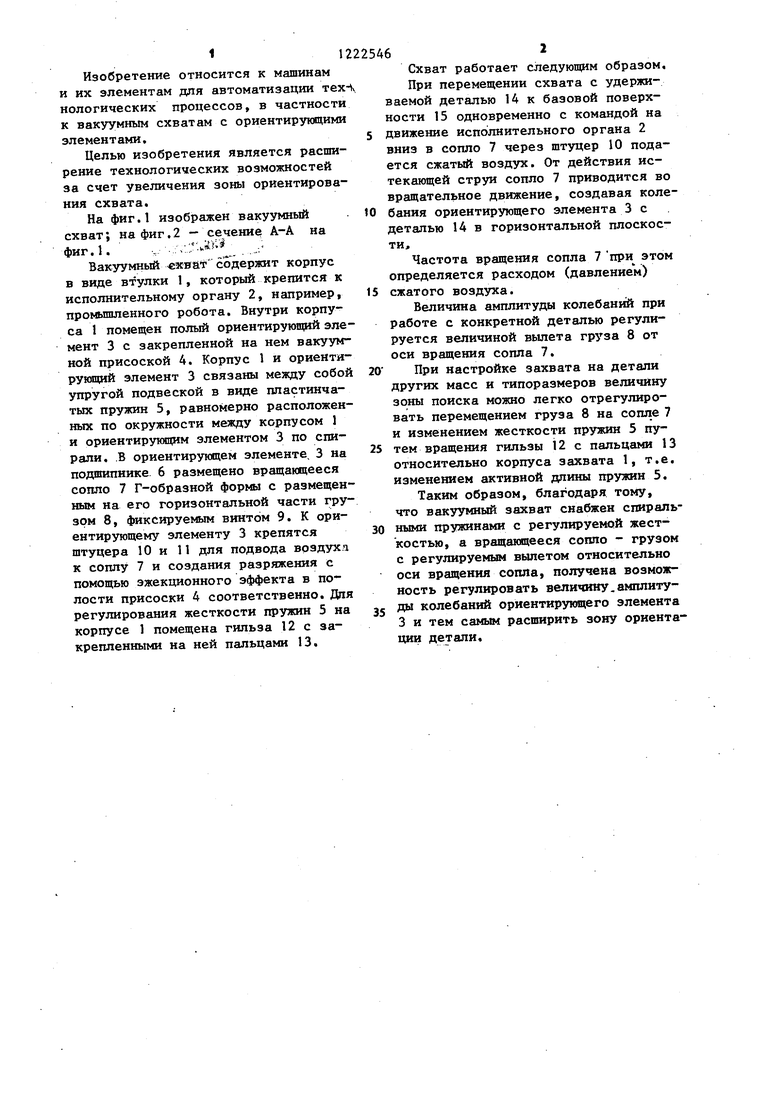
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1981 |
|
SU986778A1 |
| Вакуумный захват | 1981 |
|
SU1006212A1 |
| Схват манипулятора | 1989 |
|
SU1684028A1 |
| Схват промышленного робота | 1985 |
|
SU1284831A1 |
| Устройство для автоматической сборки деталей | 1979 |
|
SU778994A1 |
| Многопозиционный автомат для сборки узлов | 1990 |
|
SU1779530A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Манипулятор | 1982 |
|
SU1007965A1 |
| Робототехнический комплекс для обработки часовых деталей | 1989 |
|
SU1699690A1 |
| Протез верхней конечности | 1974 |
|
SU598608A1 |
| Авторское свидетельство СССР | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
