Изобретение относится к технологическому оборудованию и может быть использовано в приборостроении.
Целью изобретения является повышение точности центрирования за счет сокращения количества элементов, обеспечивающих сведение захватных губок.
На фиг, 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Схват манипулятора содержит пневмо- цилиндр 1 с поршнем 2 и штоком 3, на конце которого закреплена вакуумная присоска 4, а также поворотный корпус 5, в котором размещена втулка 6 с закрепленными на ней плоскими пружинами 7. В радиальных пазах корпуса 5 размещены регулируемые захватные губки 8, скрепленные с пружинами 7, а также пальцы 9 с роликами. Во втулке б выполнен паз 10, в котором размещен штифт 11, закрепленный на штоке 3. Между поршнем 2, корпусом 5 и втулкой 6 установлены пружины 12 и 13 соответственно, а над штоком 3 в пневмоцилиндре 1 установлен регулируемый упор 14.
Схват работает следующим образом.
На загрузочной позиции поршень 2 перемещается сжатым воздухом вниз и присоска 4 захватывает деталь. При этом втулка 6 вначале также перемещается вниз до упора в корпус 5, после чего втулка 6 останавлива- ется, а пружина 12 сжимается; захватные губки 8 под действием пружин 7 расходятся, и между ними свободно проходит присоска 4.
Затем поршень 2 возвращается в верхнее положение под действием пружин 12 и 13; втулка 6 штифтом 11 также поднимается. Захватные губки 8 при этом взаимодействуют с пальцами 9 и сходятся, центрируя деталь, удерживаемую присоской 4. Ход поршня 2 и относительное положение присоски 4 и захватных губок 8 регулируются упором 14. Далее схват перемещается на сборочную позицию, где устанавливает удерживаемую деталь в собираемое изделие.
Формула изобретения Схват манипулятора, содержащий поворотный корпус, в центральном отверстии которого коаксиально размещены подпружиненная втулка и поршень со штоком, с закрепленной на его конце вакуумной присоской, а также захватные губки, размещенные в радиальных пазах корпуса, и пальцы, закрепленные на корпусе, отличающийся тем, что, с целью повышения точности центрирования, схват снабжен плоскими пружинами, закрепленными одним концом на втулке, а другим концом закрепленными на захватных губках, кроме того, шток снабжен штифтом, а во втулке выполнен продольный закрытый паз, в котором размещен упомянутый штифт, при этом втулка подпружинена относительно поршня, а захватные губки имеют возможность взаимодействия своею тыльной стороной с пальцами.
Вид А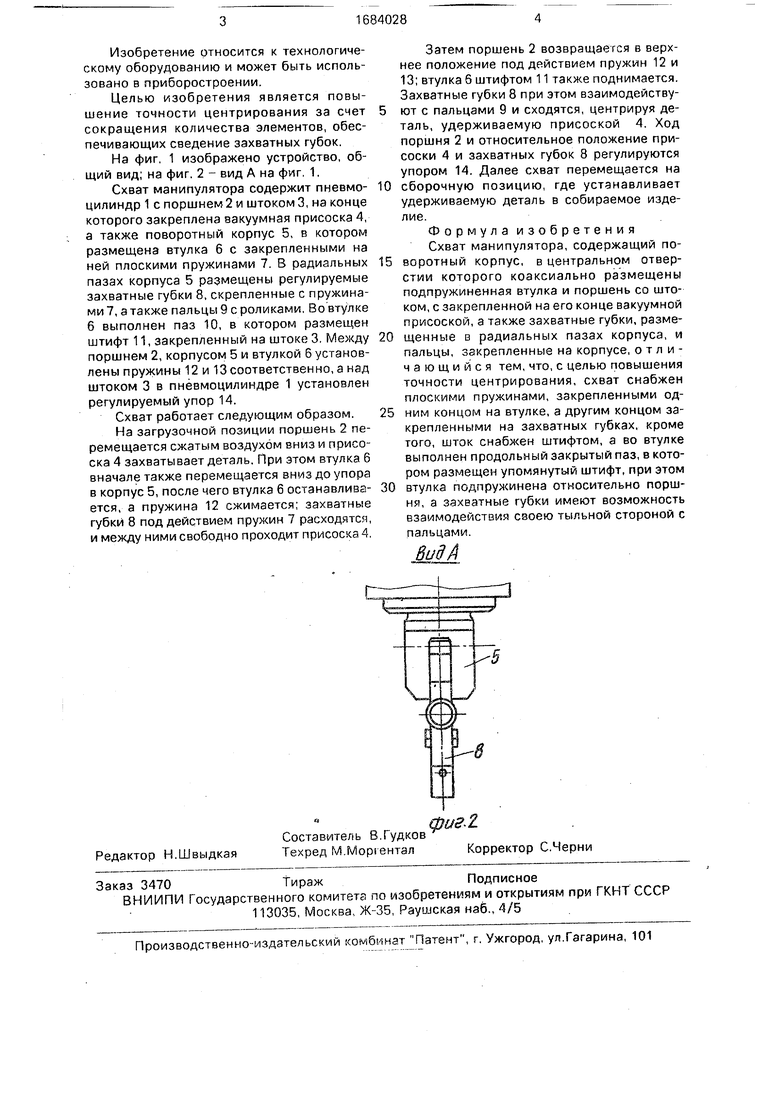
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Манипулятор | 1983 |
|
SU1151452A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
Изобретение относится к приборостроению и позволяет повысить точность центрирования за счет сокращения количества. элементов, обеспечивающих сведение захватных губок При перемещении поршня 2 вниз втулка 6 также опускается до упора в корпус 5 и останавливается. При этом захватные губки 8 под действием плоских пружин 7 расходятся. Шток 3 продолжает опускаться до тех пор, пока присоска 4 не захватит деталь. Затем шток 3 под действием пружин 12 и 13 поднимается и своим пальцем 11 поднимает втулку 6 При этом присоска 4 размещается между губками 8, которые взаимодействуют с пальцами 9 и сходятся, центрируя деталь 2 ил fe О 00 О ю 00 фиг1
| Патент США №4611397, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
