Изобретение относится к области автоматизации технологических процессов с применением проьйлшленных po6qTOB в машиностроении и приборостроении.
Известен вакуумный захват, вклю«чающий соединенный с исполнительным органом корпус и установленную в йем присоску 13. .
Однако.такой захват не обеспечивает установку или сборку детали в ре- . жиме поиска, не позволяет компенсировать накапливающуюся суммарную .погрешность из-за недостаточной точности позиционирования промышленного робота, а также из-за неточности . изготовления и фиксации базовой и устанавливаемой детали и т.д.
Цель изобретения состоит в расширении технологических возможностей захвата путем обеспечения ориентации собираемых деталей.
Для достижения цели предлагаемый вакуумный захват снабжен упругой подвеской, грузом, источником сжатого воздуха И-соединенным с ним насадком, выполненным-в виде угольника, вертикальная часть которого установлена на корпусе с возможностью врадёния, при этом горизонтальная част| ,
насадка выполнена изогнутой и соединеЕ с грузом посредством дополнительно введенных упругих злементов, а корпус связан с исполнительным органом посредством упругой подвески.
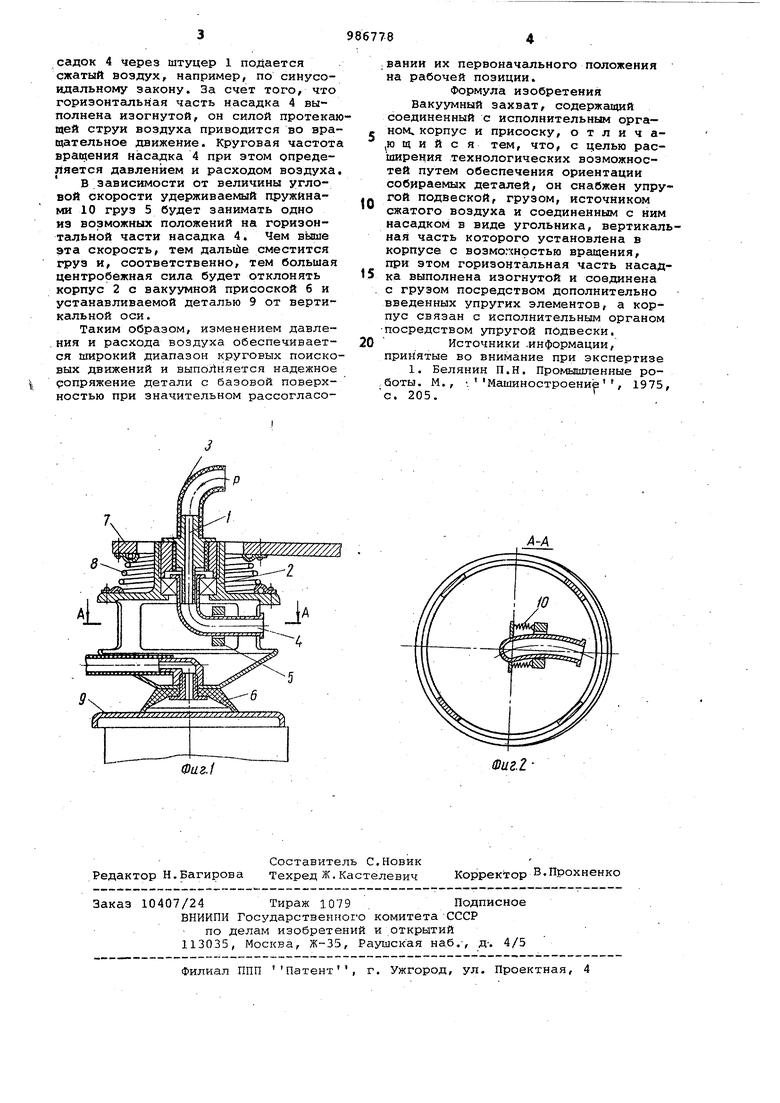
На фиг.1 - изображен предлагаемый вакуумный захват, продольный разрез; на фиг.2 - разрез А-А на фиг.1.
10
Вакуумный захват содержит штуцер 1, установленный в корпусе 2 и сое динякйций источник 3 сжатого воздуха с насадком 4. Яасадок 4 выполнен в виде угольника, вертикальная часть
15 которого установлена в корпусе 2 с возможностью вращения, а горизонт5альная выполнена изогнутой и имеет сое- . диненный с ней пос)едством упругих элементов (пружин) груз 5. На корпу20се 2 также установлена присоска. 6, соединенная с вакуумом, при .зтом корпус захвата соединен с исполни тельным органом 7 посредством упругой подвески 8. в. виде конической пружи25ны.
Захват работает следующим образом.
При подаче удерживаемой в захвате присоской б устанавливаемой детали 9 одновременно с командой на движение
30 (Исполнительного органа 7 вниз в на- .
садок 4 через штуцер 1 подается сжатый воздух, например, по синусоидальному закону. За счет того, что горизонтальная часть насадка 4 выполнена изогнутой, он силой протекающей струи воздуха приводится во вращательное движение. Круговая частота вращения насадка 4 при этом определяется давлением и расходом воздуха.
Независимости от величины угловой скорости удерживаемый пружинами 10 груз 5 будет занимать одно из возможных положений на горизонтальной части насадка 4. Чем выше эта скорость, тем далыйе сместится груз и, соответственно, тем большая центробежная сила будет отклонять корпус 2 с вакуумной присоской б и устанавливаемой деталью 9 от вертикальной оси.
Таким образом, изменением давле.ния и расхода воздуха обеспечивается широкий диапазон круговых поисковых движений и выполняется надежное сопряжение детали с базовой поверхностью при значительном рассогласо,вании их первоначального положения
на рабочей позиции.
Формула изобретения Вакуумный захват, содержащий соединенный с исполнительным органом, корпус и присоску, о т л и ч а(Ю щ и и с я тем, что, с целью расширения технологических возможностей путем обеспечения ориентации собираемых деталей, он снабжен упругой подвеской, грузом, источником сжатого воздуха и соединенным с ним насадком в виде угольника, вертикалная часть которого установлена в корпусе с возмогхнрстью вращения, при этом горизонтальная часть насадка выполнена изогнутой и соединена с грузом посредством дополнительно введенных упругих элементов, а корпус связан с исполнительным органом
посредством упругой подвески. Источники -информации, принятые во внимание при экспертизе 1. БелЯНИН П.Н, Промышленные ро.боты, М., -.Машиностроение, 1975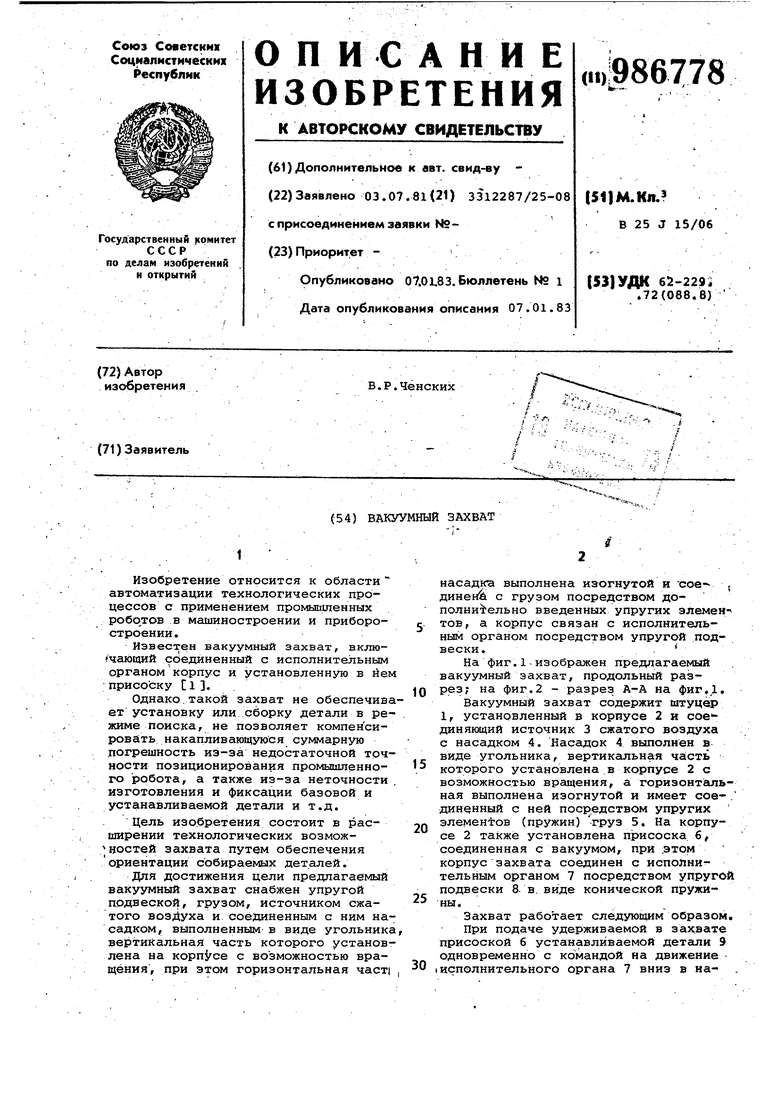
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват | 1984 |
|
SU1222546A1 |
| Устройство для автоматической сборки деталей | 1979 |
|
SU778994A1 |
| Вакуумный схват | 1977 |
|
SU637248A1 |
| Устройство для поштучного отделения плоских заготовок от стопы | 1988 |
|
SU1569062A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Устройство для автоматической сборки деталей | 1980 |
|
SU931351A2 |
| Вакуумный схват для листовых деталей | 1982 |
|
SU1030293A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
t
Фиг.(
Фиг. г
