Изобретение относится к метрологическому оборудованию и преоназначено для испытания и градуировки, угловых акселерометров.
Известны стенды угловых гармонических ускорений, содерйсашие платформу, контейнер два независимых электропривоца, в которых использованы червячно-цклиндряческие редукторы и дкфференииальцая передача l. Однако наличие зубчатых передач ухудшает точностные характеристики стенда.
Известен также стена, содержащий платформу, контейнер, привоцз причем привод платформы осуществляется непосредственно от регулируемого электродвигателя, а контейнер с испытуемым прибором приводится через редуктор от гйстерезисного дакгате- пя, который установлен на вращающейс я платформе 2 .
Однако при оггсутствии зубчатых передач в приводе платформы и регулировки привода контейнера стека обладает малым диапазоном воспроизводимых ускорений н частот.
Цель изобретения расширение диапазона задаваеглых abmjtfrryn я чазтот.
2
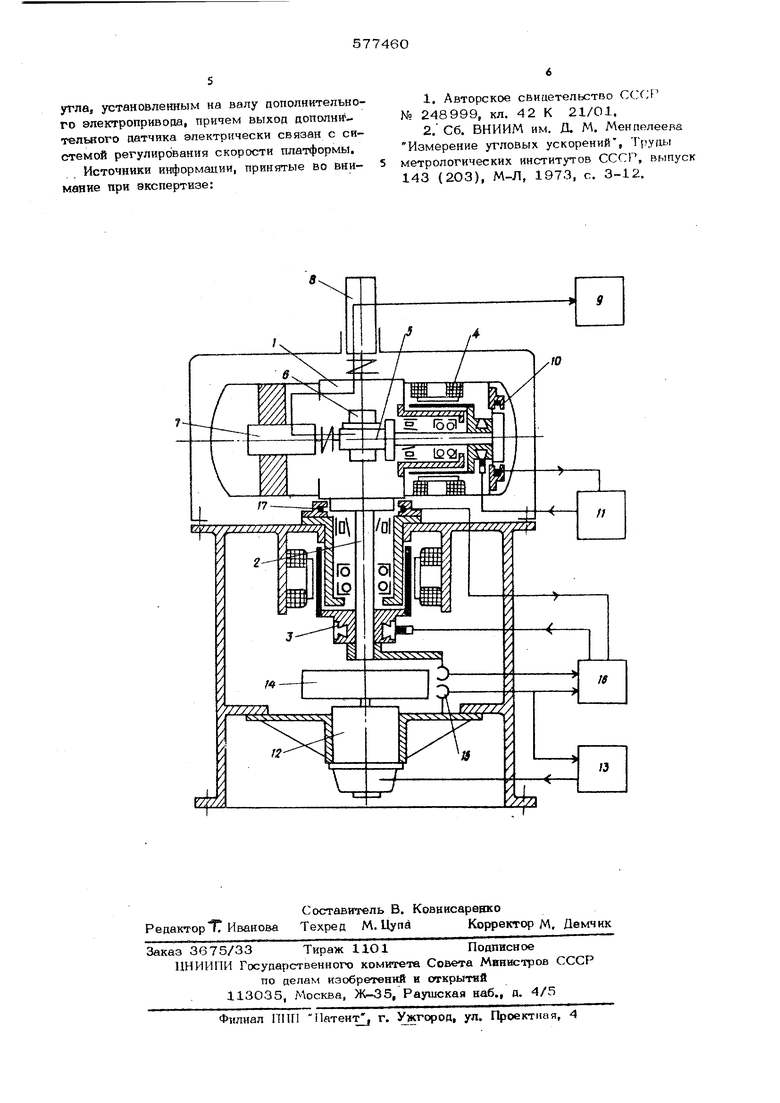
Поставленная цель достигается тем, что стенд угловых гармонических ускорений снабжен дополнительным электроприводом, вал которого установлен соосно с валом платформы и дополнительным дискретным датчиком угла, установленным на валу дополнительного электропривода, тфичем выход дополнительного датчика электрически,связан с системой регулирования скорости платформы. 10 На чертеже показан предлагаемый стенд, фронтальный разрез.
Стенд содержит платформу 1, установленную на валу 2 встроенного электродвигателя
5 3 постоянного тока. В платформу входят встроенный электродвигатель 4 привода контейнера 5 с установленным в нем испытуемым прибсфом 6. Подвижный 7 и неподаижный 8 ртутные, токосъемы служат для съема
0 сигнала с испытуемого, прибора 6, который затем регистрируется измерительным комплексом 9. Через токосъем 8 осуществляется питание электродвигателя 4 н съем сигнала с дискретного датчика 1О угла, работаюшего в цепи обратной связи по регулированию скорсхзти электродвигателя 4 системой электронрнвоца 11. Сосэсно с валом 2 установлен дсуюлнигвпьгяый элейтродвигатель 12, скорость вращения которого регулируется системой управления 13, На валу дополнительного электродвигателя 12 установлен ротор 14 дискретного датчика угла с двумя-четырьмя дорожками, на которых нанесены равноотстояшие друг от яруга, например, магнитные метки. Число меток на дорожках может быть как равным (в случае ух дорожек), так и различным. Причем разность чисел меток на дорожках должна быть минимальной. Четвертая дорожка слуксит для измерения средней скорости двигателя дополнительного электродвигателя 12. Каждая дорошса имеет счит гваюшие устройства 15, например магнитные головки. Причем одна кз них при помощи рычага установлена яа валу 2 гшатформы 1 и вращает с я вместе с ним. Остальные считывающие магнитные головки неподвижнь. Подвижная и неподвижные считывающие магнитные головки электрически связаны с системой точного электропривода 16 и служат в цепи обратной связи для регулирования скорости элек1р0йвигатвпя 3. Для увеличения надежности эксплуатации стенда привод платформ-ы имеет также запасмой дискретный датчик угла 17, аналогичный датчику 10, который электрически связан с системой электропривода 16 и поз воляет регулировать скорость вращения плат формы при отключенном дополнительном приводе 12 и считывающих устройствах 15 в менее широком диапазоне скоростей. Стенд работает следующим образом. Контейнер 5 с установленным в нем испытуемым прибором 8 приводится в-рав номерное вращение одновременно вокруг дву пересекаюш.нхся взаимно перпендикулярных осей вала 2 и вела электродвигателя 4. При этом вокруг оси чувствнггельности испытуемого прибора, которая перпендикулярна к оси вращения вала электродвигателя 4 возникает угловое ускорение Е - tOi tjj si%i (eJai где - скорсють вращения вала 2 платформы 1, рад/с; tUj - скорость вращения вала электро двигателя 4 или контейнера 5. Сигнал с испытуемого прибс а снимается токосъемами 7 и 8. Частота и фаза сиг колоа с дкскреткого датчика угла 10, зааи сншие от { екущего значения скорости вола влвктродйкгателя 4, сравниваются с частотой заоакаяего кеарцоаого генератора в си ОТвме алектропрйяода 11, которля и обвсп ивает синхронную скорость вращения конейнера 5. Аналогично работает и система точного лектропривода 16, обеспечивающая равномерное вращение платформы 1 при работе от запасного дискретного датчика угла 17. На вход фазового детектора системы электропривода 16 подаются и 4пyльcы со считывающих устройств 15. Из-за разного числа меток ротора 14 появляется разность частот, которая в фазовом детекторе преобразуется в напряжение, воздействующее на электродвигатель 3. Последний начинает вращать одно из считывающих устройств 15 и устраняет разность частот на входах фазового детектора. В установившемся режиме работы электродвигатели 3 и 12 вращаются с постоянной Скоростью, при этом подвижное считывающее устройство 15 воспроизводит сигнал с частотой tUn - Zj-() . Неподвижное считывающее устройство 15 воспроизводит сигнал с частотой, UH i Ч В синхронном режиме faJji Оц ,т.е, ZjfcJi+CJ) -Zjto j , Zt. Z, - Ч Из последнего равенства следует, что скорость основного электродвигателя 3 пропорциональна скорости дополнительного элеи-роовигателя 12 и во много раз меньше ее. Изменяя скорость вращения дополнительного двигателя 12, можно регулировать скорость основного двигателя 3 в области сверхнизких скоростей вращения. Частота обратной связи основного двигателя 3 увеличивается на несколько порядков, так как теперь она определяется суммой скоростей основного и дополнительного электродвигателей. Условия устойчивой работы электродвигателя 3 не нарушаются. Формула изобретения Стонд угловых гармонических; ускорений, содер1каший поворотную платформу, электропривод контейнера, расположенный на поворюторной платформе, токосъемы, регулируемый npi вод плггтформы, отличающийс я тем, что, с целью расщирения диапазона задаваемых амплитуд и частот, стенд снабжен дополнительным электроприводом, вал которого установлен соосно с валом платформы и дополнительным дискретным датчиком
угла, установленным на валу дополнительного электропривода, причем выход дополн тельвого датчика электрически связан с системой регулирования скорости платформы,
Источники информации, принятые во внимание при экспертизе:
1, Авторское свицетельство CCfJF № 248999, кл. 42 К 21/01.
2. Сб. ВНИИМ им, Д. М. Менпелеева Измерение угловых ускорений, Tpyiu-i метрологических институтов СССР, выпуск 143 (203), М-Л, 1973, с. 3-12.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд линейных ускорений | 1975 |
|
SU583398A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| Испытательный комплекс | 1984 |
|
SU1224731A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
