Изобретение относится к машиностроению, а именно к автооператорам для транспортировки и установки деталей на шпиндель станка, а также пе- с р емещения готовых деталей из зоны обработки к позиции разгрузки.
Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения за- Ю грузки и выгрузки деталей со шпинделя без его остановки.
На фиг.1 показан автооператор в исходном положении, общий вид, на фиг.2 - то же, в положении загрузки.
Автооператор содержит установленную на корпусе 1 механическую руку, выполненную в виде силового цилиндра 2, шток 3 которого связан с поршнем 4 посредством шарика 5, подпружинен пружиной 6 и жестко соединен с цангой 7 захвата, вьтолненной с заборным конусом. Зажимное кольцо 8 смонтировано на корпусе 1 с возможвую полость силового цкпиндра 2 подают рабочую жидкость, за счет че го его поршень 4 начинает перемещат ся влево, перемещая захватную цангу
7совместно с подпружиненным ловите лем 14, при этом шток 3 перемещаетс по шлицам кольца 11, а пружина 6 сжимается. о
Под действием пружин 9 кольцо 8 перемещается влево совместно с цангой 7, принудительно деформируя ее до тех пор, пока упоры ограничения хода штанг 10 не упрутся в корпус 1
8это время цанга 7, продолжая пере мещаться влево, входит в деталь 21, захватывает ее с кармана 20 и, пере мещаясь дальше, подходит к зоне загрузки шпинделя 19. Конический на конечник 17 входит в гнездо вращающегося шпинделя 19 и передает через штифт 15 вращение штоку 3 и жестко соединенной с ним цанге 7. При дальнейшем перемещении штока 3
15
20
ностью свободного продольного переме-25 влево пружина 13 сжимается и цанга
с Ю
4652442
вую полость силового цкпиндра 2 подают рабочую жидкость, за счет чего его поршень 4 начинает перемещаться влево, перемещая захватную цангу
7совместно с подпружиненным ловителем 14, при этом шток 3 перемещается по шлицам кольца 11, а пружина 6 сжимается. о
Под действием пружин 9 кольцо 8 перемещается влево совместно с цангой 7, принудительно деформируя ее до тех пор, пока упоры ограничения хода штанг 10 не упрутся в корпус 1.
8это время цанга 7, продолжая перемещаться влево, входит в деталь 21, захватывает ее с кармана 20 и, перемещаясь дальше, подходит к зоне загрузки шпинделя 19. Конический наконечник 17 входит в гнездо вращающегося шпинделя 19 и передает через штифт 15 вращение штоку 3 и жестко соединенной с ним цанге 7. При дальнейшем перемещении штока 3
15
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1975 |
|
SU598732A1 |
| Захватное устройство | 1989 |
|
SU1763175A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Устройство съема и передачи деталей на токарном автомате | 1989 |
|
SU1712126A1 |
| Захват | 1980 |
|
SU905061A1 |
| Автоматический токарный станок | 1982 |
|
SU1026972A1 |
| Устройство для сборки запрессовкой деталей типа вал-втулка | 1986 |
|
SU1333527A1 |
| Поворотно-зажимное устройство | 1983 |
|
SU1127745A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Загрузочное устройство | 1976 |
|
SU657961A1 |
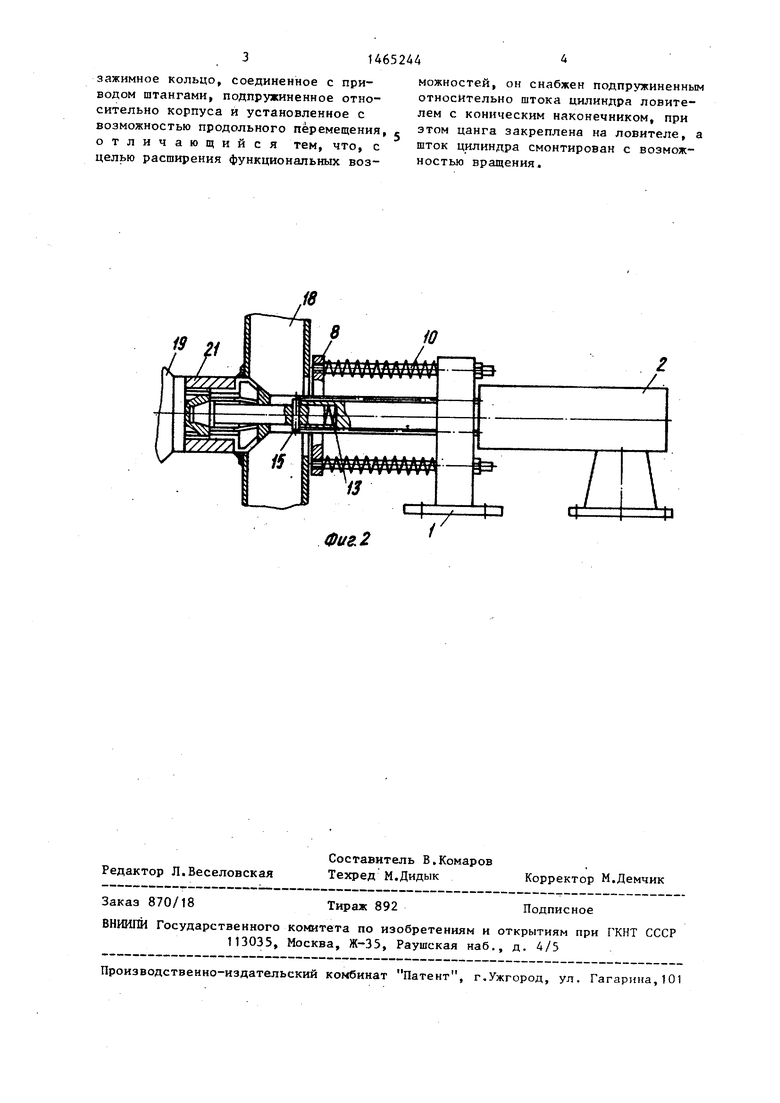

щения, подпружинено пружинами 9 и соединено с приводами штангами 10, которые имеют на своих свободных концах упоры ограничения хода. На Hapyat- ной поверхности штока 3 выполнены 30 шлицы, которыми он сопрягается с внутренними шлицами кольца 11, установленного в корпусе 1 в подшипниках 12 качения. В цанге 7 установлен подпружиненный пружиной 13 ловитель 14, в котором закреплен щтифт 15, перемещающийся по направляющим 16 штока 3. На конце ловителя 14 закреплен конический наконечник 17 из фрикционного материала. Система управле- 40 ния приводом перемещения цанги (силовым цилиндром 2) связана с системами управления приводами накопителя 18
7 надевает деталь 21 на зажимное устройство шпинделя 19. После срабатывания зажимного устройства подается сигнал на прекращение подачи рабочей среды в силовой цилиндр 2, цанга 7 выходит из детали 21 и возвращается в исходное положение.
При выполнении операции, съема обработанного изделия со шпинделя 35 станка цанга 7, перемещаясь в крайнее левое положение, благодаря заборному конусу входит во внутреннее отверстие детали 21, зажимное устройство шпинделя 19 разжимает деталь 21, которая свободно повисает на захватной цанге 7. После командыона прекращение подачи рабочей среды в силовой цилиндр 2 пружина 6 сокращается, цанга 7, перемещаясь вправо.
и зажимного устройства (не показано)
шпинделя 19. На накопителе 18 закреп-45 проходит через окно в накопителе 18,
лен карман 20, куда попадают детали образованное подпружиненными пласти21 и подпружиненные пластины 22,
которые образуют выходное окно в нанами 22, которые препятствуют продви жению вправо детали 21, сбрасывая ее в приемник (не показан).
копителе 18 с диаметром, меньшим ружного диаметра переносимой автоопе-50 ратором детали.
Автооператор работает следующим образом.
В начальном положении деталь 21 находится в кармане 20 накопителя 18. Для установки детали 21 на зажимное устройство (не показано) шпинделя 19 обслуживаемого станка в пра
7 надевает деталь 21 на зажимное устройство шпинделя 19. После срабатывания зажимного устройства подается сигнал на прекращение подачи рабочей среды в силовой цилиндр 2, цанга 7 выходит из детали 21 и возвращается в исходное положение.
При выполнении операции, съема обработанного изделия со шпинделя станка цанга 7, перемещаясь в крайнее левое положение, благодаря заборному конусу входит во внутреннее отверстие детали 21, зажимное устройство шпинделя 19 разжимает деталь 21, которая свободно повисает на захватной цанге 7. После командыона прекращение подачи рабочей среды в силовой цилиндр 2 пружина 6 сокращается, цанга 7, перемещаясь вправо.
нами 22, которые препятствуют продвижению вправо детали 21, сбрасывая ее в приемник (не показан).
После этого цикл работы повторяется .
Формула изобретения
Автооператор, содержащий установленную на корпусе механическую руку, выполненную в виде силового цилиндг ра с захватом, включающим цангу и
зажимное кольцо, соединенное с приводом штангами, подпружиненное относительно корпуса и установленное с
можностей, он снабжен подпружиненн относительно штока цилиндра ловите лем с коническим наконечником, при
- 1%-- «ж«-АЛХ ЛТ Щ/Л
возможностью продольного перемещения, , этом цанга закреплена на ловителе
ЛТПТЛТТО«л « «Л-.
отличающийся тем, что, с целью расширения функциональных возшток цилиндра смонтирован с возмож ностью вращения.
Фиг. 2
можностей, он снабжен подпружиненным относительно штока цилиндра ловителем с коническим наконечником, при
- 1%-- «ж«-АЛХ ЛТ Щ/Л
этом цанга закреплена на ловителе
шток цилиндра смонтирован с возможностью вращения.
W
/
| Автооператор | 1975 |
|
SU598732A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
