Изобретение относится к литейному производству и может быть применено при раздаче цветных и черных металлов.
Цель изобретения - повышение точности дозирования.
На фиг. 1 схематично показано раздаточное дозирующее устройство; на фиг. 2 - программный дозирующий блок.
Устройство содержит ванну 1 с металлом, электромагнитный насос 2, соедиВыходной сигнал регулятора б дозы, зависящий от соотношения сигналов на его входах, подается на источник 3 питания насоса 2 и определяет величину тока по его нагрузочной цепи (насосу 2). При наличии этого тока происходит откачка жидкого металла из ванны 1 в заливочное устройство. С датчика 4 расхода через резистор 14 на вход интегратора 5 расхода поступает сигнал, пропор15
20
25
ненный с источником 3 питания, трубонро- 10 циональный расходу расплава. Интегрирование этого сигнала во времени дает на выходе интегратора сигнал, пропорциональный величине дозы, подаваемый на вход регулятора б дозы через резистор 9. На регуляторе 6 дозы сравниваются оба входные сигнала, по мере заливки его выходной сигнал уменьшается, а по истечении заданной дозы становится равным нулю. Это ведет к прекращению протекания тока через насос и, соответстЕзенно, заливки.
Программный дозирующий блок 7 настраивается таким образом, что сигнал об окончании цикла дозирования подается заведомо позднее момента окончания истечения дозы. При этом программный дозирующий блок 7 снимает выходной сигнал с регулятора 6 дозы и одновременно - с выхода интегратора 5 (например, разряжает конденсатор 15 замыканием размыкающегося контакта 19).
В начале следующего цикла дозирования с первого выхода программного дозирующего блока 7 вновь подается сигнал задания дозы на регуляторе 6 дозы и со второго выхода - разрещение на интегрирование на интегратор 5. Величина дозы регулируется изменением величины сигнала, поступающего на регулятор 6 дозы с программного до- зирующего устройства 7.
При появлении возмущающих воздействий система регулирования автоматически изменяет производительность и время дозирования так, что величина дозы остается неизменной.
В устройстве сводится к минимуму время транспортного запаздывания (длительность заполнения трубопровода металлом).
Это достигается тем, что в начальный момент дозирования до момента заполнения 45 металлом активной зоны датчика 4 расхода насос 2 работает с максимальной производительностью (так называемый режим «отсечки), а далее происходит отсчет дозы.
вод с установленным на нем датчиком 4 расхода, выход которого соединен с первым входом интегратора 5, регулятор 6 дозы, первый вход которого соединен с выходом интегратора 5, а второй вход - с первым выходом программного дозирующего блока 7, причем второй выход этого блока дополнительно соединен с вторым входом интегратора 5, а выход регулятора 6 дозы соединен с источником 3 питания насоса.
Устройство может быть реализовано на любых известных элементах автоматики. Например, интегратор 5 и регулятор б дозы реализованы на операционных усилителях. Цени питания и коррекции операционных усилителей не показаны. В данном случае регулятор б дозы представляет собой операционный усилитель 8 с реализованной на нем апериодической передаточной функцией с помощью входных резисторов 9 и 10, резистора 11 и конденсатора 12 в цени обратной связи. Интегратор 5 выполнен на операционном усилителе 13 с входным резистором 14, емкостью 15 в обратной связи и реализует функцию интегрирования. На регуляторе б может быть реализована любая передаточная функция.
Программный дозирующий блок 7 может быть выполнен в виде потенциометрическо- го задатчика на резисторах 16 и 17 и контактов 18 и 19 реле времени, которые могут выполняться, например, в виде транзисторных ключей. Размыкающийся контакт 19 подключен к обратной связи операционного усилителя 13 интегратора 5. Через замыкающийся контакт 18 сигнал задания поступает через резистор 10 на вход операционного усилителя 8 регулятора б дозы.
Источником 3 питания насоса может служить, например, тиристорное устройство с фазоимнульсным управлением.
Устройство работает следующим образом.
Цикл дозирования определяется программным дозирующим блоком 7. С началом цикла через замыкающийся контакт 18 с переменного резистора 17 подается сигнал задания дозы на вход операционного усилителя 8 через резистор 10 регулятора 6 дозы. Одновременно дается разрещение на интегрирование интегратора 5, например, размыканием размыкающегося контакта 19 в цепи обратной связи операционного усилителя 13.
40
50
Настройкой системы регулирования можно получить желаемые статические и динамические свойства устройства. В устройстве в качестве электромагнитного насоса могут применяться различные типы кондукционных и индукционных насосов, что не меняет его 55 принципиальной сущности. Возможно исполнение системы автоматического регулирования на современной эле.ментной базе, например, с применением микропроцессора.
Выходной сигнал регулятора б дозы, зависящий от соотношения сигналов на его входах, подается на источник 3 питания насоса 2 и определяет величину тока по его нагрузочной цепи (насосу 2). При наличии этого тока происходит откачка жидкого металла из ванны 1 в заливочное устройство. С датчика 4 расхода через резистор 14 на вход интегратора 5 расхода поступает сигнал, пропорциональный расходу расплава. Интегрирование этого сигнала во времени дает на выходе интегратора сигнал, пропорциональный величине дозы, подаваемый на вход регулятора б дозы через резистор 9. На регуляторе 6 дозы сравниваются оба входные сигнала, по мере заливки его выходной сигнал уменьшается, а по истечении заданной дозы становится равным нулю. Это ведет к прекращению протекания тока через насос и, соответстЕзенно, заливки.
Настройкой системы регулирования можно получить желаемые статические и динамические свойства устройства. В устройстве в качестве электромагнитного насоса могут применяться различные типы кондукционных и индукционных насосов, что не меняет его принципиальной сущности. Возможно исполнение системы автоматического регулирования на современной эле.ментной базе, например, с применением микропроцессора.
Ф1/1.1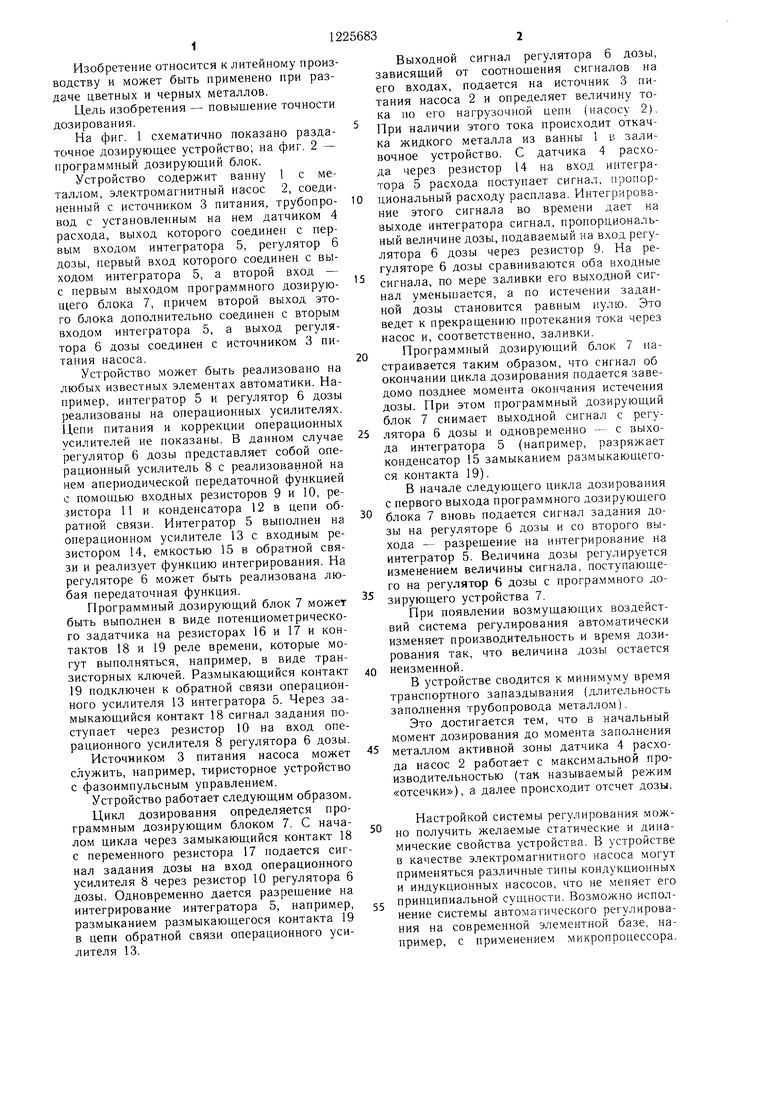
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разливки расплава | 1983 |
|
SU1158289A1 |
| Устройство для автоматического управления процессом литья | 1986 |
|
SU1405962A1 |
| Устройство для дозирования жидкого металла | 1983 |
|
SU1138243A1 |
| Устройство для автоматического управления процессом литья | 1989 |
|
SU1653894A1 |
| Устройство для дозирования наплавленного металла | 1990 |
|
SU1738529A1 |
| Интегратор | 1981 |
|
SU955106A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| КУЛОНОМЕТРИЧЕСКАЯ УСТАНОВКА | 1997 |
|
RU2120625C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |


| Устройство для дозирования жидкого металла | 1977 |
|
SU719805A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Устройство для автоматического дозирования жидкого металла | 1980 |
|
SU933241A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Циркунов В | |||
| Э | |||
| и др | |||
| Бесконтактный контроль потока жидких металлов | |||
| - Рига: Знание, 1973, с | |||
| Гидравлическая или пневматическая передача | 0 |
|
SU208A1 |
| Устройство для дозирования жидкого металла | 1983 |
|
SU1138243A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
