Изобретение относится к системак автоматики и может быть использовано в автоматизированных системах управления машинами, механизмами, поточными линиями и т.д.
Цель изобретения - сокращение командных шин, упрощение конструкции и процесса программирования.
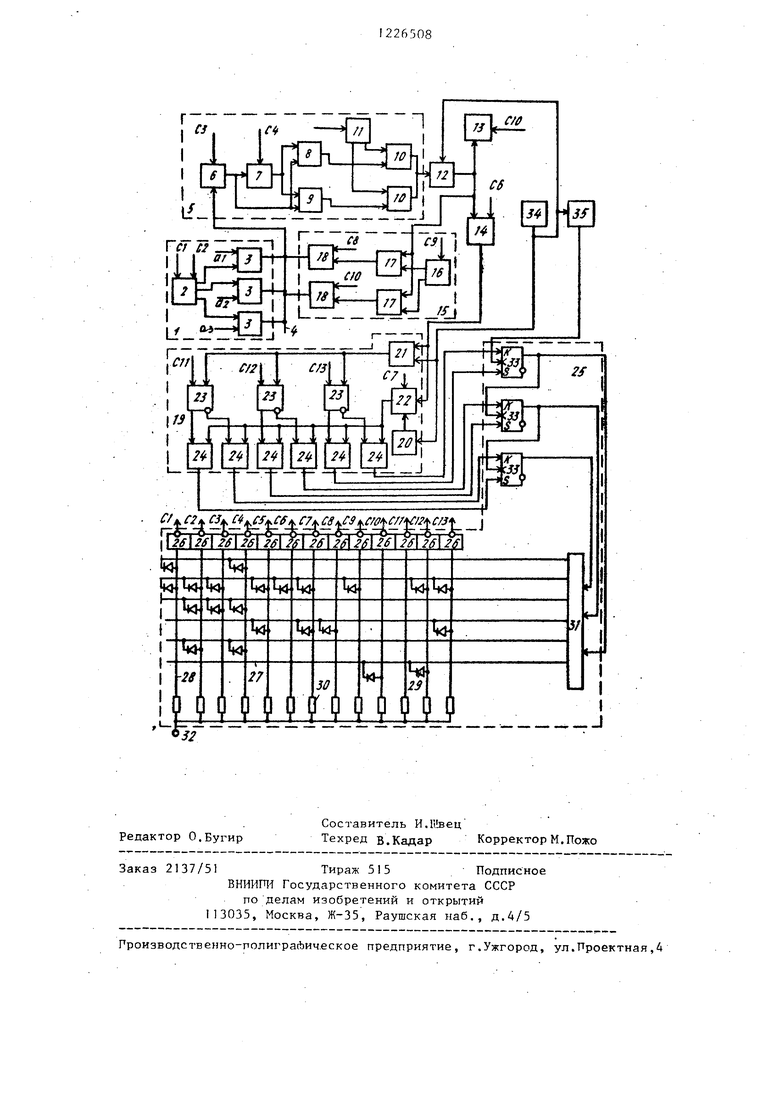
На чертеже представлена функцио- нальная схема устройства для дистан- ционного программного управления электропроводными механизмами.
Устройство состоит из входного блока 1, содержащего дешифратор 2, соединенный с элементами 3 совпадени выходы которых подключены к информационной шине 4, соединенной с входом вычислительного блока 5, состоящего из элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 6, управ ляемого триггера 7 записи, элементов И 8 и ИЛИ 9, элементов 10 совпадения и дешифратора J1. Выход блока 5 через триггер 12 памяти связан с выходным блоком 13, управляемым инвертором 4 и с блоком 15 оперативной памяти, содержащим дешифратор 16 элементы записи 17 и считьшания 18. Выход инвертора 14 соединен с управ- ляющим блоком 19, содержащим элемент НЕ 20, первый и второй элементы И 21 и 22, элементы 23 записи с прямыми и инверсными выходами, элементы 24 считывания, вых оды которых связаны с блоком 25 задания программы, со- С
держащим командные шины С - ,3 , элементы НЕ 26, горизонтальные шины 27, вертикальные шины 28, диоды 29, резисторы 30, дешифратор 31, клемму 32 питания, счетные триггеры 33. Синхронизирует работу устройства генератора 34 импульсов, связанный с элементом 35 задержки.
К клемме 32 подключается источник напряжения, питающий устройство.
Выходной блок состоит из стандартных ячеек памяти и соответствующих усилителей (не показаны), передающих логические сигналы из ячеек памяти на электроприводные механизмы (не показаны) по команде из программного блока 25.
Входные сигналы а,, а и а характеризуют состояние объекта управления и используются устройством, как осведомительные сиглалы. Физически сигналы а, а и а представляют собой два уровня напряжения один из которых условно принимается за логическую 1, а другой - за ло
гический О. Датчики таких сигналов могут устанавливаться на различ ньгх машинах, конвейерных линиях. Они определяют взаимное положение механизмов, обрабатываемых деталей и т.д Типы таких датчиков -могут быть самые различные. Простым примером мо- , гут служить путев.ые (конечные) выключатели КВД-25, БВК24 и т.д.
Сигналы на входах, на которые поступают дискретные сигналы с датчиков (не показаны) обозначают а,
а , а.
Входы всех элементов обозначены стрелками, направленными к этим элементам.
Триггер 12 памяти производит запись информации только тогда, когда на выходе генератора 34 имеется 1.
Счетные триггеры 33 изменяют свое состояние после прихода сигнала 1 на их счетные входы.
Под элементами 17 и 23 записи понимаются ячейки памяти, куда записывается информационный сигнал в виде логической 1 или О по срот- ветств:7ющим командам С, - C,j . В качестве одного из примеров ячейки памяти можно привести RS триггер с управляющим (командным) входом . и с прямым и инверсным выходами для элемента 23.
Элемент с 1итывания может представлять собой двухвходовой логический элемент И, на первый вход которого подается информация в виде логической 1 или О, а на второй вход подается команда на считьша- ние на соответствующем такте.
На одном такте блок 5 может вычислить одну из следующих логических функций:
А ,
S
где
А
А.. А,: А., А
2
А.-А I А + А
2
А( + Aj J А . fT. , И А, - входы блока 5,
2
А
г
а А А, и AJ инверсия А.
Принцип действия предлагаемого устройства рассмотрим на примере работы электропривода механизма в зависимости от результатов вычисления функции
(
+ а
55
Длительность тактов определяется суммарным временем задержки распространения сигнала в реальных логических элементах, а также временем, необходимым для записи информационя
ного сигнала п ч-рип еры н яч( памяти. Выбранная или определенная длительность такта обеспечивается частотой следования импульсов генератора импульсов.
Начальное состояние всех элементов памяти, в том числе и всех триггеров, соответствует логическому О на их прямых выходах. Обычно это обеспечивается, например, подачей стандартного сигнала (например, кнопкой) по целям установки в О всех триггеров, т.е. на R-входы всех триггеров. Начальное состояние других элементов устройства знача- ния для работы устройства не имеет.
Физически функция а,- а + + aj реализует возможность включени какого-либо механизма тогда и толь- ко тогда-, когда напряжение входного сигнала (например, от конечных выключателей) а соответствует логической 1, а значение напряжений сигналов а 2 и а-, соответствует ло- гическому О, или когда напряжение входного сигнала а , соответствует логической 1 независимо от гэначе- ний а и а 2 .
На первом такте активизируется первая (верхняя) шина 27 программного блока 25, логические О через соответствующие диоды 29 поступают на элементы НЕ 26, и на командных шинах С и С появляются команды, обеспечивающие подачу вводного сигнала а, через элемент 3 на шину 4 и запись значения 1 в триггер 7. На втором такте активизируется вторая шина 27 и под действием команд С| и С происходит передача значения сигнала а на вход блока 5, где по команде С элемент 6 инвертирует а Команда С,, позволяет получить на выходе блока 5 результат вычисления функции а а, и за счет единичного сигнала с выхода генератора 34 полученный результат записывается в триггер 12. Если значение функции а , а равно 1, то под действием команды Су (1) оно записывается в верхний элемент 17 записи блока 15.. При этом на входах инвертора 14 имеются логические 1, а на выходе - О. Поэтому с выхода элемента И 21 на пер- вые входы элементов 23 поступают логические О и состояния элементов 23 на изменяются.
5
l2 «S5f}.44
Дальнейшее вычисление функции а,, а 2 3. продолжается следующим образом. На третьем такте активизируется третья шина 27, и по командам
С,, С-, Сл значение а записьгоаетii О
ся в триггер 7. На четвертом такте активизируется четвертая шина 27, и под действием команд С и С происходит передача результата вычисления функции а, из элемента 17 через элемент 18 на вход блока 5 и вычисле iffle функции а,- а а, Если результат равен О, то он записывается в триггер 12-и далее в нижний элемент 17 записи под действием команды С (О). На пятом такте по командам С и С значения а, записывается в триггер 7. На шестом такте по команде С,д значение а а а появляется на входе блока 5 и, так как команда Су имеет логический О, на выходе блока 5 появляется результат вычисления функции а, a.j а -ь а,, который записьтается в триггер 12 и дале поступает в выходной блок 13.
Допустим, что на втором такте результат вычисления функции а, а равен О, то заранее известно, что функция а, а а также равна О, в этом случае под действием команды Cg (1) на выходе управляемого инвертора 14 появляется-сигнал 1. При этом команды С,, , С, , С, записываются в элементы 23, так как с выхода элемента 21 поступает разрешающий сигнал 1. Когда на выходе генератора 34 появляется сигнал О, то он запрещает запись в триггер I2 и элементы 23. При этом на выходе элемента НЕ 20 появляется 1, с выхода элемента 22 поступает разрешающий сигнал на считьшание команд t-(( С,, , С,2 , С,2 С,5 , и происходит передача этих команд на R- и S-входы счетных триггеров 33. Эти триггеры переключаются в состояние, соответствующее четвертому такту, и результат вычисления функции а, а с выхода триггера 12 записывается- в нижний элемент 17, т.е. вычисление производится по второму такту, а программа записи соответствует четвертому такту. Когда на генераторе 34 появляется 1, то устройство переходит к работе на пятом такте.
Вернемся к четвертому такту пер-- воначального описания работы устрой-- ства. Допустим, что значение функции
ay a
равно 1, тогда заранее
известно, что функция а а а + а равна 1. При этом по команде С (О) на выходе элемента 14 устанавливается 1 и с выхода элемента 21 поступает сигнал, разрешающий запись, команд С, , С„ , С;,з в элементы 23. Когда на выходе генератора 34 появляется логический О, то происходит считьгеание значений команд С(1 , , С , С , С, , С,з элементами 24 и триггеры 33 переключаются в состояние, соответствующее шестому такту. Происходит запись результата вычисления функции а, а
а а с выхода триггера 12 в выходной блок 13 по команде С, . Таким образом для вычислений всей функции понадобилось четыре такта вместо шести. Элемент 35 задержки служит для задеряжи сигнала на время переходного процесса в счетных триггерах 33.
Как видно Из приведенного при- мера, за счет введения триггера 12 памяти и элементов записи с прямым и инверсными выходами в предлагаемом устройстве по сравнению с известным сокращается количество командных шин (13 вместо 18), упрощается конструкция (нет блоков управления блоком оперативной памяти и вьтходным блоком) , очЛпадает необходимость в программировании пяти командных шин.
При увеличении числа ячеек памяти и, соответственно, входов дешифратора, например, в блоке оперативной памяти количество сокращаемых командных шин увеличивается, так как общее сокращение количества-командны шин соответствует формуле п га + с
+ К, где п - число сокращенных щин, m - число входов детифратора блока оперативной памяти, с - число входов дешифратора выходного блока, К - число счетных триггеров.
Формула изобретения
Устройство для дистанционного программного управления электроприводными механизмами, содержащее выходной блок, управляемый инвертор, генератор импульсов, соединенньш выходом с первым входом первого элемента И, через элемент задержки - с первым входом блока задания программы, а через элемент fE - с первым входом второго элемента И, блок оперативной памяти и входной блок подключены выходами к информационной шине, соединенной с первым входом вычислительного блока, выход второго элемента И соединен с первыми входами элементов считьгеания, а выход первого элемента И - с первыми входами элементов записи, выходы элементов считьгоания соединены с соответствующими установочными входами блока задания программы, отличающееся тем, что, с целью упрощения конструкции, сокращения числа командных шин, в нем элементы записи вьшолнены с инверсными выходами и введен триггер памяти, первый вход которого соединен с выходом вычислительного блока, второй вход - с выходом генератора импульсов, а выход - с первым входом выходного блока, с первым входом блока оперативной памяти и через управ- ляемьш инвертор с вторыми входами первого и второго элементов И.
Изобретение относится к системам автоматики и может быть использовано в автоматизированных системах управления машинами, механизма тн поточными линиями и т.д. Целью изобретения является сокращение командных шин, упрощение конструкции и процесса программирования. Устройство для дистанционного программного управления электроприводными механизмами состоит из входного блока, са- держащего дешифратор, элементы совпадения, вычислительного блока, состоящего из элементов исключающее ИЛИ, триггера, элементов И и ИЛИ, элементов совпадения и дешифратора, генератора импульсов, блока задания программы, блока управления, блока оперативной памяти, выходного блока, триггера памяти, инвертора. В данном устройстве для дистанционного программного управления сокращено количество командных шин, упрощена конструкция отдельных блоков. 1 ил. § (Л to ю О5 СЛ О оо
Редактор О.Бугир
Составитель И.Швец
Техред В.Кадар Корректор М.Пожо
Заказ 2137/51Тираж 515Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграЛич.еское предприятие, г.Ужгород, ул.Проектная,4
| Устройство для дистанционного программного управления механизмами | 1979 |
|
SU773672A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1982 |
|
SU1071999A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
