первым входом элемента ИСКЛЮЧАЮ№Е ИЛИ, выход которого соединен с выходом блока, вторые входы элементами
и ИЛИ подключены к соответствующим контактам управляющих команд блока задания программ.
Изобретение относится к системам автбматики и может быть использовано в автоматизированных системах управления, например конвейерными линиями, машинами, поточно-транспортными системами и т.д. Известны устройства для управле ния приводными механизмами, состоящие из логических элементов и шин tU . Недостатком указанных устройств йвляется громоздкость, низкая надеж ность и функциональная ограниченность. Наиболее близким по технической сущности является устройство, содер жащее входной блок, две информационные шины, инверторы, элементы И и ИЛИ, блок оперативной памяти с записывающими и считывгиощими элементами, имеющими обратную связь с информационными шинами, генерато импульсов, программный и выходной блоки . t2 . Недостатком известного устройств является относительно низкое быстро действие и функциональная ограничен ность из-за невозможности изменить программу управления в зависимости например от результата вычисления той или иной промежуточной функции Такая необходимость возникает, во-первых, при вычислениях логических функций за меньшее количество Тактов, чем при обычном, применяемом в известном устройстве способе а во-вторых, в случае реализации алгоритма управления, предусматривающего выбой той или иной програми«ы управления электроприводнь 1и механизмами в зависимости от резуль taTOB промежуточных вычислений. Кроме того, известное устройство обладает относительной конструктивr ной сложностью при параллельной пер даче данных через информационные шины на инвертирующие элементы из-за большого количества шин и необходимости иметь для каждой шин свой выходной блок и блок оператив ной памяти, так как заранее неизвестн сколько раз в процессе Отработки про рамиал надо будет обращаться к одни и тем же входным данным или данным Хранящимся в оперативной памяти. Целью изобретения является повышение быстродействия и сокращение числа информационных шин. Поставленная цель достигается тем, что в устройство для дистанционного программного управления электроприводными механизмами, содержащее генератор импульсов, соединенный выходом с первыми входами элемента И и элемента ИЛИ-НЕ, входной блок, подключенный к информационной шине, блок оперативной памяти, выходной блок, блок задания программы, введены блок управления выходным блоком и последовательно соединенные вычислительный блок, управляемый инвертор и блок управления оперативной памятью, первый выход которого соединен с первым входом блока оперативной памяти, подключенного вторым входом к выходу вычислительного блока и к первому входу выходного блока, а выходом через информационную шину к входу вычислительного блока, выход управляемого инвертора соединен с первым выходом блока управления выходным блоков и со вторым входом элемента И, выход которого соединен со вторым входом элемента ИЛИ-НЕ и с первыми входами элементов считывания, подключенных вторыми входами к выходам соответствующих элементов записи, а выходами - к соответствующим входам блока задания программы, второй вход которого через элемент задержки соединен с выходом генератора импульсов, выход элемента ИЛИ-НЕ соединен с первыми входами элементов записи, вторые входы которьсс соединены с соответствующими контактами управляющих команд от блока задания программы, выход блока управления выходньп блоком подключен ко второму входу выходного блока. Вычислительный блок содержит элемент ИЛИ, дешифратор, первый элемент совпадения и последовательно соединенные элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, триггер записи, элемент И и элемент совпадения, выход которого соединен с выходом блока, выход элемента ИСКЛЮЧАЮ1ЦЕЕ ИЛИ соединен со вторым входом элемента И и через элемент ИЛИ - с первым входом первого элемента совпадения, второй вход которого подключен к выходу
дешифратора, а выход - к выходу блока, второй вход второго элемент совпадения соединен со вторым выходом дешифратора, вход которого, а также второй вход триггера записи и элемента ИСКЛЮЧАЮОЩЕ ИЛИ соединен с соответствующими контактами управляющих команд блока задания программ..
Блок управления выходным блоком и блок управления оперативной памятью содержат элемент И, соединенный выходом с первым входом элемент ИСКЛЮЧАКХЦЕЕ ИЛИ, выход которого соединен с выходом блока, вторые входы элемента И и ИЛИ подключены к соответствующим контактам управляющих команд блока задания программ.
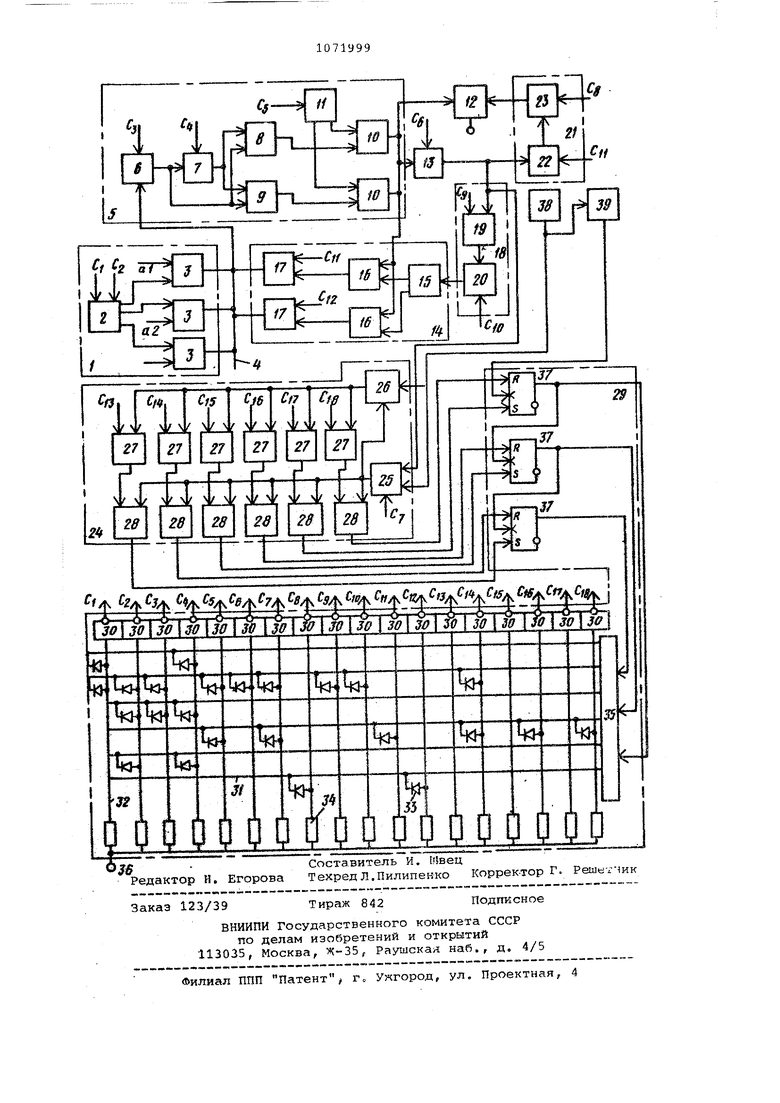
На чертеже представлена функциональная схема устройства дистанционного программного управления электроприводными механизмами.
Устройство состоит из входного блока 1, содержащего дешифратор 2, соединенного с элементами 3 совпаде ния, выходы которых подключены к информационной шине 4, соединенной с выходом Вычислительного блока 5, состоящего из элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 6, управляемого триггера 7,записи, элементов И 8 и ИЛИ 9, элементоа 10 совпадения и дешифратора 11. Выход блока 5 связан с выходным блоком 12, управляемым инвертором 13, и с блоком 14 оперативной памяти, содержащим дешифратор 15, элементы записи 16 и считывания 17. Выход инвертора 13 соединен с модулем 18 управления блоком оперативно памяти, состоящим из элементов И 19 и ИСКЛЮЧАЩЕЕ ИЛИ 20, с блоком 21 управления выходным блоком, содержащим элементы И 22 и ИЛИ 23, а также с модулем 24 управления программным блоком, содержащим элементы И 25 и ИЛИ-НЕ 26, ячейки записи 27 и считывания 28, выходы последних связаны с программным блоком 29, содержащим командные цшны С/ - С« , элементы НЕ 30, горизонтальные шины 31, вертикальные шины 32, диоды 33, резисторы 34, дешифратор 35, клемму 36 питания, счетные триггеры 37. Синхронизирует работу устройства генератор 38 импульсов, связанный с элементом 39 задержки.
Все блоки, кроме входного, а также все модули обведены пунктиром.
К клемме 36 подключается источни напряжения, питающ11й устройство.
Элемент НЕ 30 служит для инвертирования логического нуля, поступакицего на горизонтальные шины 31. с выхода дешифратора 35, через вертикальные шины 32 и диоды 33.
Выходной блок 12 состоит из стандартньах ячеек памяти и соответствующих усилителей на чертеже не показаны), передающих логические.сигналы из ячеек памяти на электроприводные механизмы (на чертеже не показаны). По командам блока 21 блок 12 запоминает, усиливает и передает на электроприводные механизмы логические сигналы.
Запись в блок 14 и триггер записи 7 осуществляется по заднему фронту импульса.
Счетные триггеры 37 изменяют свое состояние по переднему фронту испульса, поступающего на их счетнне входы. На сигналы на входах af, ai , а} поступают дискретные сигналы с датчиков (на чертеже не показаны).
При подаче на входы деши(1фатора сигналов 10, 11, 01 соответственно на верхнем, среднем и нижнем выходах дешифратсчра появляются логические единицы.
Если на выходе дешифратора 11 имеется логический сигнал 1, то на правом выходе дешифратора появляется логическая единица, а если на его входе имеется О, то на левом входе дешифратора появляется 1.
При поступлении 1 на вход дешифратора 15 активизируется его верхний выход, при поступлении О активизируется его нижний выход.
При изменении состояния счетных триггеров 37 от поступакадих на их счетные входы импульсов на выходах дешифратора 35 произойдет перемешение логического U поочередно сверху вниз.
Если значение команды С/ равно О, то на выходе элемента 6 имеется тот же логический сигнал, что и на шине 4. Если значение команды Cj равно 01, то на выходе элемента 6 появляется инверсный по сравнению с сигналом на шине 4 сигнал.
Запись в триггер 7 производится по команде С.
Дешифратор 11 и элементы 10 позволяют подавать на выход вычислительного блока 5 значения выходных сигналов элег-ieHTOB 8 и 9 в зависимости от значения команды С/ . На одном такте блок 5 может вычислить одну из следуюйшх логннеских функций:
А, , А, , А, , А, , А, А, , А , А, -f А , А, +А, , А, +AJ , А +А, , где А, и Ai - сигналы на входах 5J fn - инверсия А .
В качестве упргшляамого инвертора 13 можно взять стандартные двухвходо вые элементы. Сумма по модулю два или ИСКЛЮЧАЮЩЕЕ ИЛИ.
Принцип действия предлагаемого устройства на примере работы электропривода механизма в зависимости от результатов вычисления функции а . 1, а, + Bj будет следуннцим.
На первом такте активизируется первая (верхняя} шина 31 программного: блока 29, и нулевые сигналы через софтветствуюйще диоды 33 поступят на элементы НЕ 30. На командных шинах CI:H Сц ПОЯВЯ2СЯ единичные сигналы, которые обеспечат подачу входного сигнала -а на шину 4 и запись значейия а в триггер 7. На втором также активизируется вторая шина 31, и появятся команды С% -С. , С , С« . Под действием команд С, и Cj произойдет передача значения сигнала aj на вход блока 5, где по команде Сз;элемент 6 инвертирует а . Команда :Cj позволит получить на выходе блрка 5 результат вычисления а, а . этот результат равен 1, ТО под действием команды Cf он запишется в верхний элемент записи 16 блока оперативной памяти 14, На входах элемента 13 имеются две логические 1, одна из которых поступает с выхода блока 5, а вторая - с командной шины Си. Поэтому на выходе элемента 13 имеется логический О и дальнейшее вычисление функции а a. а, будет продо жаться в описанной далее последова ельности. На третьем такте йктиви|ируется третья шина Ли под действием команд Q - с произойдет зайись значения а в триггер 7. На четвертом также активизируется четвертая шина 31 и по командам Qi и С/ произойдет передача результата вычислений функции а. а из верхнего элемента 16 памяти за счет элемента 17 считывания на вход элемента 6 блока 5 и вычисление функции a.a.. Если результат вычисления равен О, он запишется в нижний элемент 16 записи, так как на входе элемента 20 присутствует О (С О и Сд О). На пятом такте активизируется пятая шина 31 и по командам С я Ct/ произрйдет запись значения aj в триггер 7. На шестом такте активизируется шестая шина 31 и по коменде С-ц произойдет считывание значений а. а из нижнего элемента 16 записи, и так как С О, на выходе блока 5 появится результат вычисления функции а . а + и, который по команде Се через элемент 23 подается на выходной блбк 12.
Теперь вернемся к второму такту. Дойустим, что на втором такте результат вычисления функции ал а, равен О ,тогла дальнейшее вычисление функций а - не имеет смысла, так
кик она равна О. В этом случае под действием команды Cg на выходе управляемого инвертора 13 появится логическая 1 и на выходе элемента 20 появится нулевой сигнал, таи как Cto 1, При этом уже на втором такхе произойдем запись результата вычисления функции адЭг а в нижний элемент 16 записи, Поэтом третий и четвертый такты можно опустить и перейти сразу к пятому такту.
Когда на втором такте генератор 38 импульсов выдает логический О, то на выходе элемента 25 установится логическая 1 и произойдет за.пись значений С - С в ячейки 27 записи. При этом значения С С соответствуют тому состоянию счетных триггеров 37, которое появляется у них на пятом такте работы устройства. Далее, когда генератор 38 выдает
за счет команды С
логическую
и единичного сигнала на выходе инвертора 13 происходит считывание значений , - . из ячеек 27 записи при помощи ячеек 28 считыва ния, на общие входы которых поступает разрешающий сигнгш с выхода элемента 25. При этом триггер 37 устанавливается в положение, соответствующее пятому такту работы устройства, т.е. и четвертый такты опусксцотся. Таким образом, на вычисление функции а, -32. -а,, понадобилось всего два такта вместо четырех. Элемент 39 задержки служит ,цля задержки сигнала, поступающего с генератора 38, на время переходных процессов в счетных триггерах 37 связанных с переходом этих триггеров из одного состояния в другое под действием командных сигналов, поступающих с элементов 28 считывания блока 24.
Вернемся к четвертому такту рабо устройства. Допустим, что значение вычисленной на четвертом такте функции а4-а2.-1з равно 1, тогда вычилять значение всей функции ,-5j ag не имеет смысла, так как оно будет равно 1, В этом случае, учитывая, что Сд О, на выходе управляемого инвертора 13 установится логическая 1, которая поступит на первый вход элемента И 22. На второ вход этого элемента подана единична команда С( , При этом на выходе элемента 22 появится 1, поступающая на вход элемента 23, и на его выходе появится сигнал логической 1, разрешающей запись результата вычисления функции а, -а аз и одновременно функции а.1-аг + а-з в выходной блок 12, На этом же четвертом такте команды С« - С« записываются в ячейки 27 записи в момен появления на выходе генератора 38
логического О. В начале следующего такта, когда на выходе генератора 38 появится логическая 1, произойдет считывание из ячеек 27 команд С« , и под действием этих команд произойдет установка счетных триггеп ров 37 в нулевое состояние. При этом процесс вычи с&1ения начнется вновь, т.е. активизируется первая шина 32.
Таким образом, на вычисление функции а/агaj + а понадобилось четыре такта вместо шести.
Как видно из приведенного примера, повышается быстродействие предлагаемого устройства за счет сокращеиия числа тактов при вычислении логических последовательных и параллельных функций вслучаях получения логического нуля при промежуг точном вычислении последовательной функции и в случае получения логической единицы при промежуточных вычислениях параллельной функции. Одновременно расширяются функциональные возможности устройства за счет изменения программы управления
в зависимости от значений промежуточных вычислений и сокращается количество информгщионных шин.
Повьаиение быстродействия устройства по сравнению с базовыми уменьшает время запаздывания между моментом приема сигнёшов с датчиков и моментом выдачи управляемых коман на электроприводные механизмы, что увеличивает точность поддержания технологических режимов, а значит ведет к повьхиению качества выпускаемой продукции и экономии материала например, на технологических линиях по производству гипсокартонных лис тов, бтделочных конвейерных линиях и т.д. в промьаиленности строительных материалов.
Возможность менять программу управлений в зависимости от результатов промежуточных вычислений позволяет оптимизировать технологический процесс, например при распределении материалов по потребителям, перепуске пара между автоклавами, что приводит к экономии пара и мате1 риалов. I 1 г -Cif Ct f 57
Ij Я/fT I f/ |Ш A
24
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДНЫМИ МЕХАНИЗМАМИ'П1 •: •if4 ^• | 0 |
|
SU395886A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
