Изобретение относится к радиотехнике, преимущественно к манипуляторам, предназначенным для работы в труднодоступных местах технологического оборудования, в том числе во вредных, агрессивных средах, на- пример при технологических процессах производства полупроводниковых приборов и интегральных схем.
Целью изобретения является снижение металлоемкости конструкции.
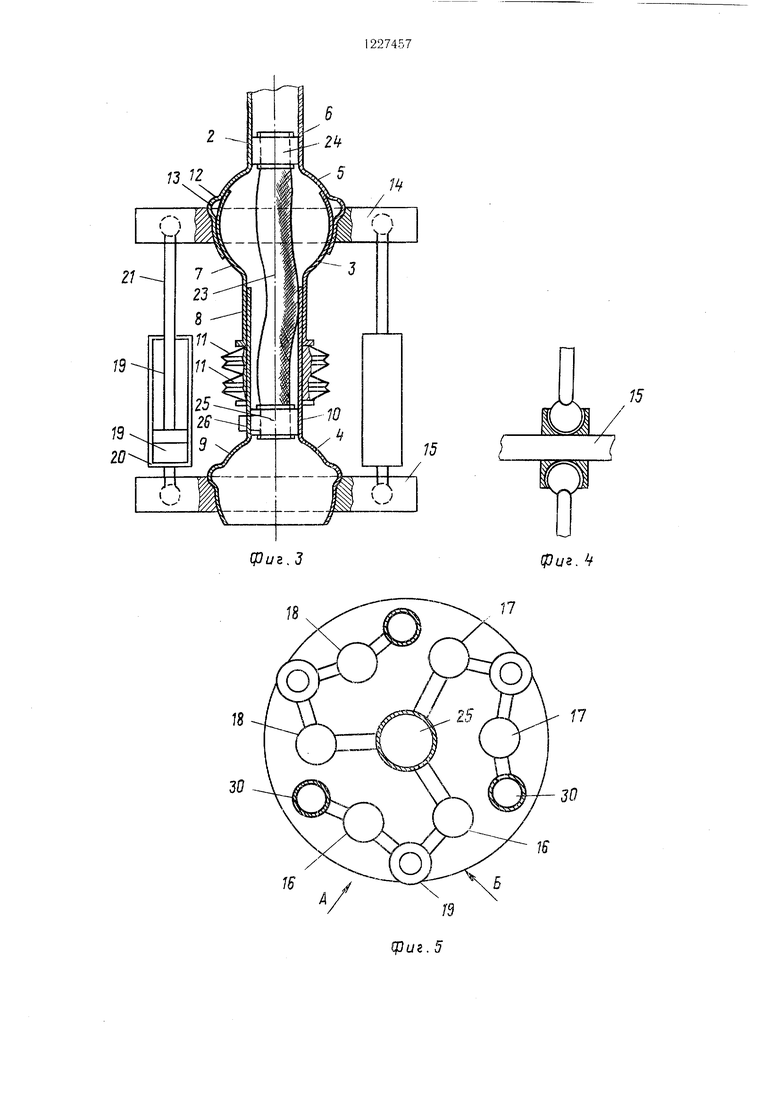
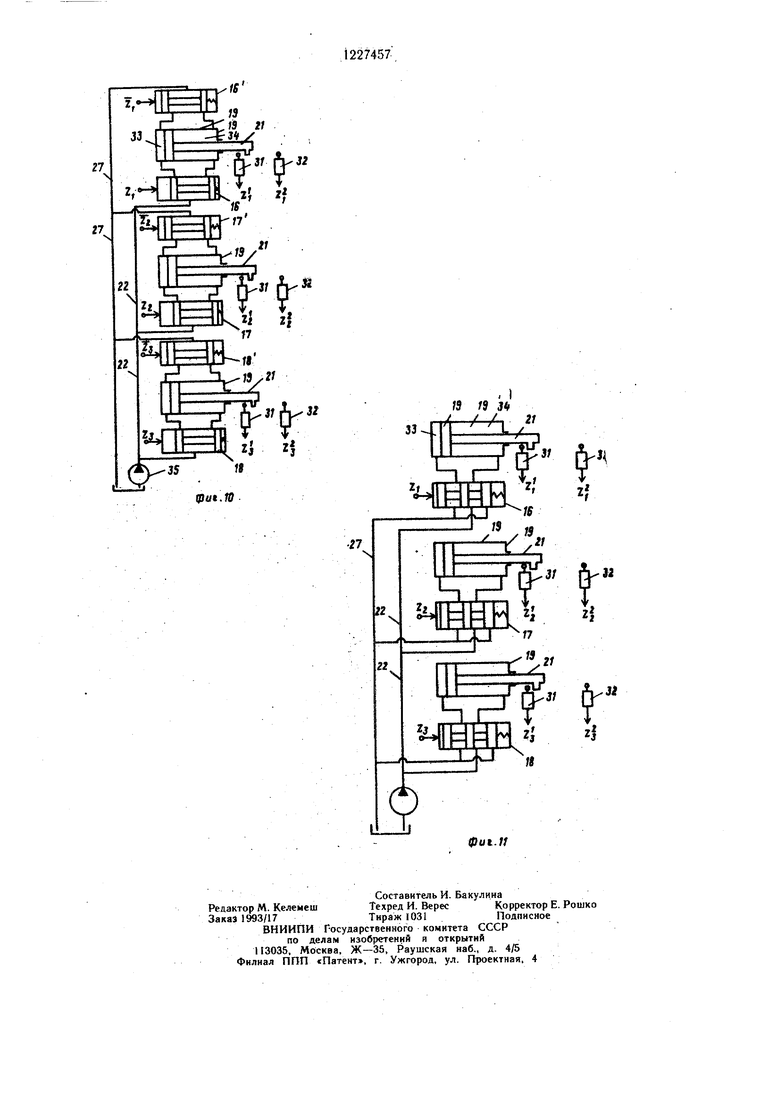
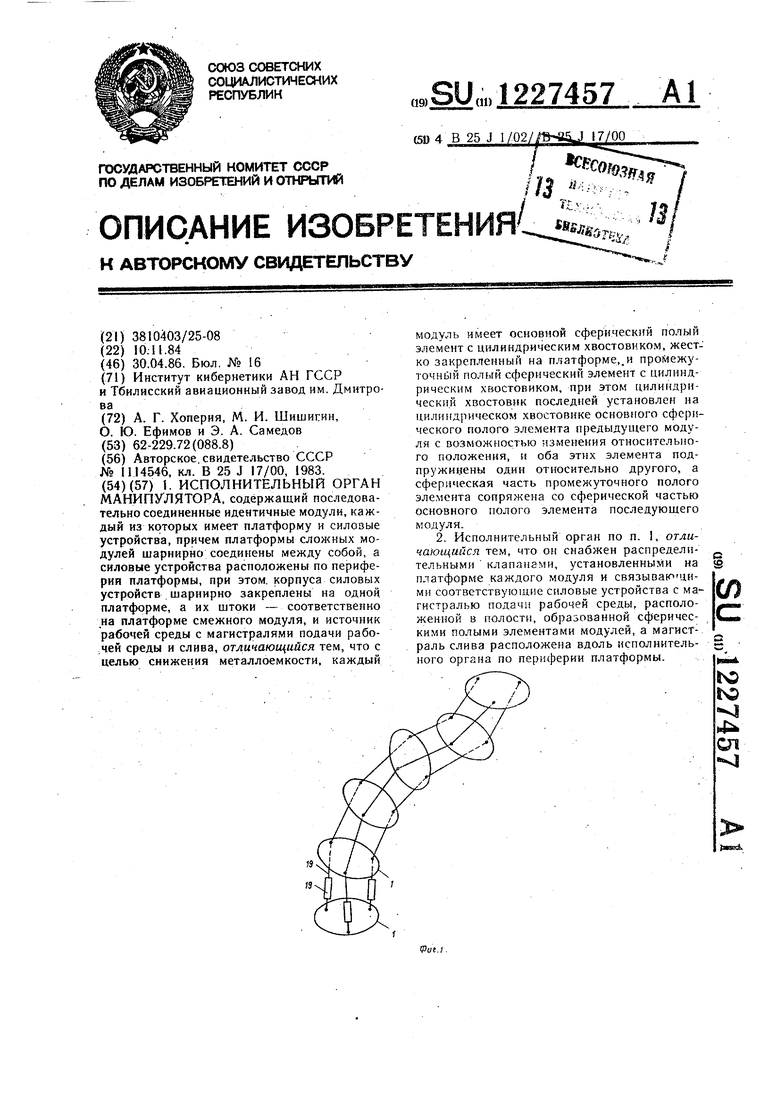
На фиг. 1 изображена кинематическая схема исполнительного органа манипулятора; на фиг. 2 - модуль исполнительного органа манипулятора, общий вид; на фиг. 3 - то же, продольный разрез; на фиг. 4 - шарнирное крепление силовых устройств к платформе модуля; на фиг. 5 - схема соеди- нения силовых устройств и распределительных клапанов с магистралью подачи рабочей среды и магистралями слива, вид сверху, вариант; на фиг. 6 - размещение распределительных клапанов, обслуживающих одно силовое устройство; на фиг. 7 - вид А на фиг. 5; на фиг. 8 - вид Б на фиг. 5; на фиг. 9 - то же, что на фиг. 5, другой вариант; на фиг. 10 - принципиальная функциональная схема привода одного из модулей исполнительного органа гианипулятора, вари- ант; на фиг. 11 - то же, другой вариант.
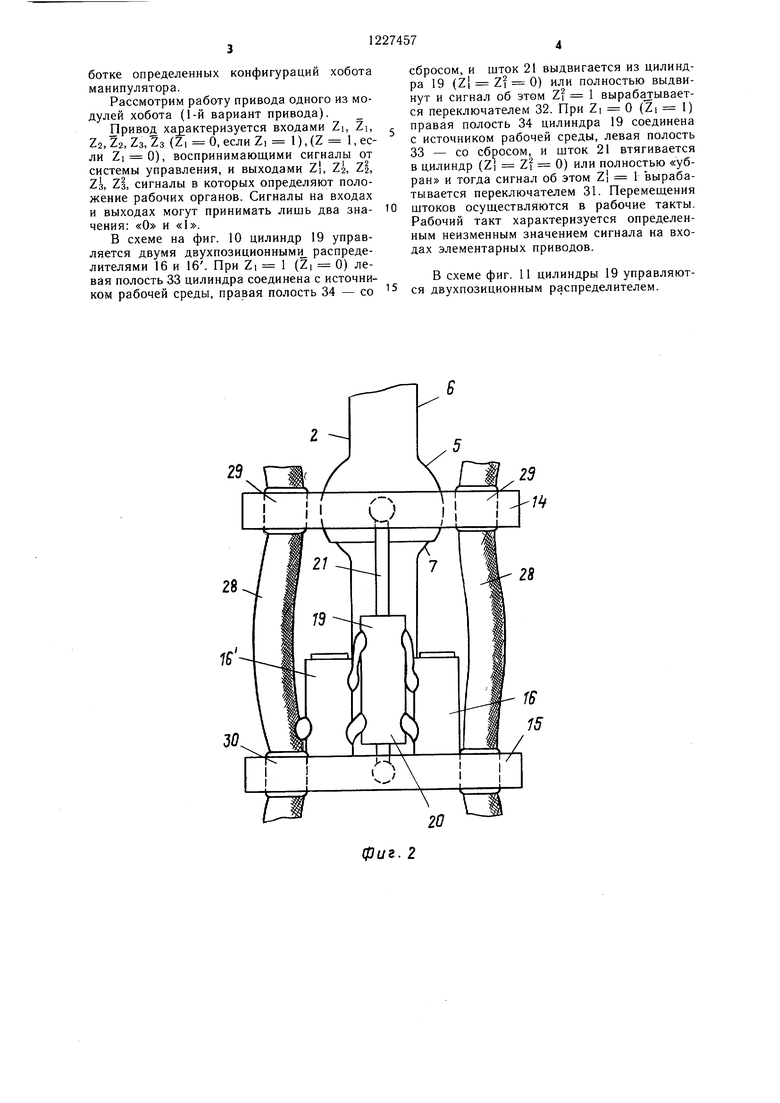
Каждый модуль 1 исполнительного органа манипулятора состоит из трех звеньев 2, 3 и 4. Звенья 2 и 4 также являются звеньями смежных сопряженных модулей 1. Звено 2 выполнено в виде основного сферического по- лого элемента 5 с цилиндрическим также полым хвостовиком 6. Звено 3 выполнено в виде промежуточного сферического полого элемента 7 с цилиндрическим хвостовиком 8, а звено 4 выполнено также в виде основного сферического полого элемента 9 с цилинд- рическим хвостовиком 10.
При этом сферическая часть основного полого элемента 5 охватывает сферическую часть промежуточного полого элемента 7, а цилиндрический хвостовик 10 введен в цилиндрический хвостовик 8 с возможностью их относительного положения, и оба эти элемента подпружинены один относительно другого пружиной 11.
Сферическая часть основного полого элемента 5 имеет ребро 12 жесткости, в кото- ром размещена уплотнительная манжета 13 (уплотнительная манжета выполнена из специального материала, не требующего смазки) .
На сферических частях основных полых элементов 5 и 9 звеньев 2 и 4 моду- лей жестко закреплены платформы 4 и 15 соответственно.
На платформе 15 размещены распределительные клапаны 16, 17 и 18 (16, 17 и 18). По периферии модуля установлены силовые устройства 19, например гидравлические ци- линдры. Корпуса 20 гидравлических цилиндров 19 щарнирно закреплены на платформе 15, а штоки 21 - на платформе 14. Модули
последовательно соединены один с другим. Звено 2 с платформой 14 является звеном и платформой смежного сопряженного модуля. Таким образом, осуществляется взаимосвязь всех модулей и образуется исполнительный орган манипулятора, последний модуль которого на конечном звене несет схват, рабочий инструмент.
Магистраль 22 подачи рабочей среды к силовым устройствам от источника рабочей среды (не показан) состоит из гибких трубок 23 (щлангов). Магистральный участок трубки 23 соединяет камеры 24 и 25, расположенные в звеньях 2 и 4, и проходит через полость, образованную сферическими полыми элементами звеньев 2, 3 и 4. От камеры 25 отводятся трубки 26, по которым рабочая среда через распределительные клапаны 16, 17 и 18 подается в силовые устройства. Магистраль 27 слива рабочей среды состоит из гибких трубок 28 (щлангов). Магистральный участок трубки 28 соединяет камеры 29 и 30 и протянут по периферии модуля хобота. Распределительные клапаны 16, 17 и 18 предназначены для запирания и слива рабочей среды из полостей силовых цилиндров привода модуля (1-й вариант привода).
Силовые устройства каждого модуля 1 представляют собой совокупность, например, трех элементарных приводов, для которых двигателями служат, например, гидравлические цилиндры 19, а положение рабочих органов (щтоков 21) контролируется с помощью конечных переключателей 31 и 32. Положение щтока 21 определяется состоянием распределительных клапанов 16 и 16 (1-й вариант привода) и распределительного клапана 16 (2-й вариант привода), обеспечивающего соединение полостей 33 и 34 цилиндра 19 с магистралью 22 подачи рабочей среды либо со сбросом. Подача под давлением рабочей среды (масла) по магистрали 22 происходит при помощи насоса 35.
Входами элeмeнтapнJз x приводов служат каналы управления Zi, Zi, Z2, Za, Zs, Za распределительных клапанов (1-й вариант привода) и каналы управления Zi, Z2, Za распределительных клапанов (2-й вариант привода), выходами - выходные каналы Zl, Zf, Zi, Zi, Zs, Zi конечных переключателей 31 и 32.
Исполнительный орган манипулятора работает следующим образом.
По команде устройства управления (не показано) срабатывает определенная группа силовых устройств 19, щтоки 21 которых, выдвигаясь, поворачивают платформы 14 .модулей 1 относительно платформы 15, что позволяет осуществить изгиб хобота манипулятора и придать ему определенную необходимую конфигурацию. Звенья 2 с платформами 14 модулей удерживаются щтоками 21 силовых устройств и опираются на звенья 3, которые подпружинены пружинами 11 и обеспечивают достаточную жесткость при отработке определенных конфигураций хобота манипулятора.
Рассмотрим работу привода одного из модулей хобота (1-й вариант привода).
Привод характеризуется входами Zi, Zi, Z2, Zg, Zs, Zs (Z1 0, если Zi 1), (Z 1, если Zi 0), воспринимающими сигналы от системы управления, и выходами Zj, Zz, Zi, Za, Zi, сигналы в которых определяют положение рабочих органов. Сигналы на входах и выходах могут принимать лишь два значения: «О и «1.
В схеме на фиг. 10 цилиндр 19 управляется двумя двухпозиционными распределителями 16 и 16. При Zi 1 (Zi 0) левая полость 33 цилиндра соединена с источником рабочей среды, правая полость 34 - со
сбросом, и шток 21 выдвигается из цилиндра 19 (Zl Zf 0) или полностью выдвинут и сигнал об этом Z 1 вырабатывается переключателем 32. При Zi О {Zi I) правая полость 34 цилиндра 19 соединена с источником рабочей среды, левая полость 33 - со сбросом, и шток 21 втягивается в цилиндр (Zi Zf 0) или полностью «убран и тогда сигнал об этом Zl 1 вырабатывается переключателем 31. Перемещения штоков осуществляются в рабочие такты. Рабочий такт характеризуется определенным неизменным значением сигнала на входах элементарных приводов.
В схеме фиг. 11 цилиндры 19 управляются двухпозиционным распределителем.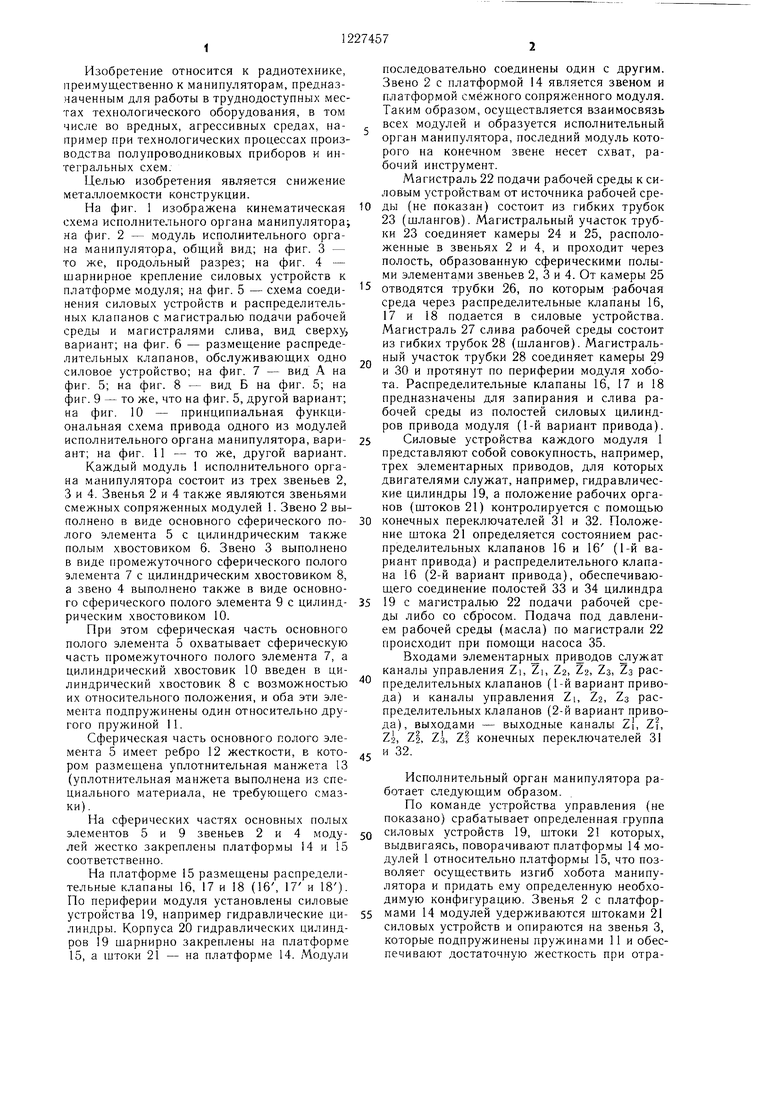
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1220780A1 |
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Круглая гребнечесальная машина | 1950 |
|
SU93206A1 |
| Манипулятор | 1989 |
|
SU1720853A1 |
| Исполнительный орган манипулятора | 1988 |
|
SU1618635A1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
30
25
фиг. 2
30
16
(pus. 5
И
В ид 5
Фиг.8
Л
IS
фц.В
7
N
33
13 /9 J« г;
i
w.
Ж9
л.:
f
МШЯ i
3 «
Составитель И. Бакулина
Редактор М. КелемешТехред И. ВересКорректор Е. Рошко
Заказ 1993/17Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
IЬ
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
