Изобретение относится к робототехнике, в частности к манипуляторам, предназначенным для работы в труднодоступных местах металлоконструкций.
Цель изобретения - улучшение динамических характеристик путем уменьшения силы трения в сферическом шарнире и устранения износа поверхностей.
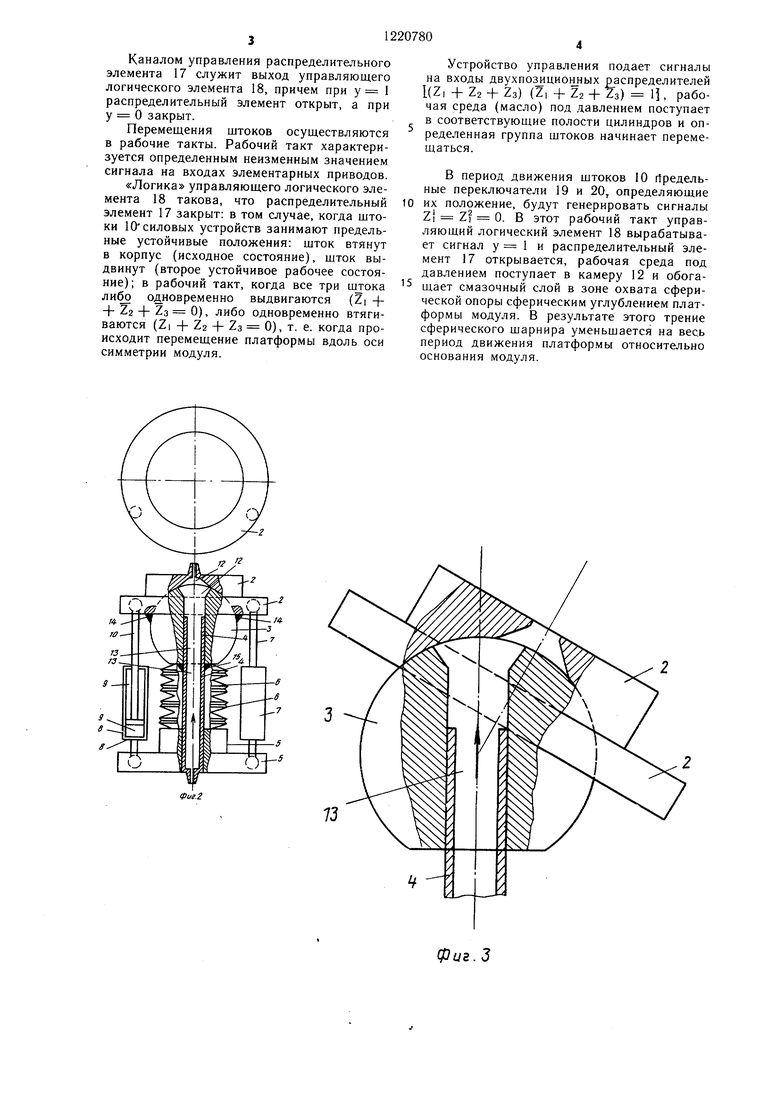
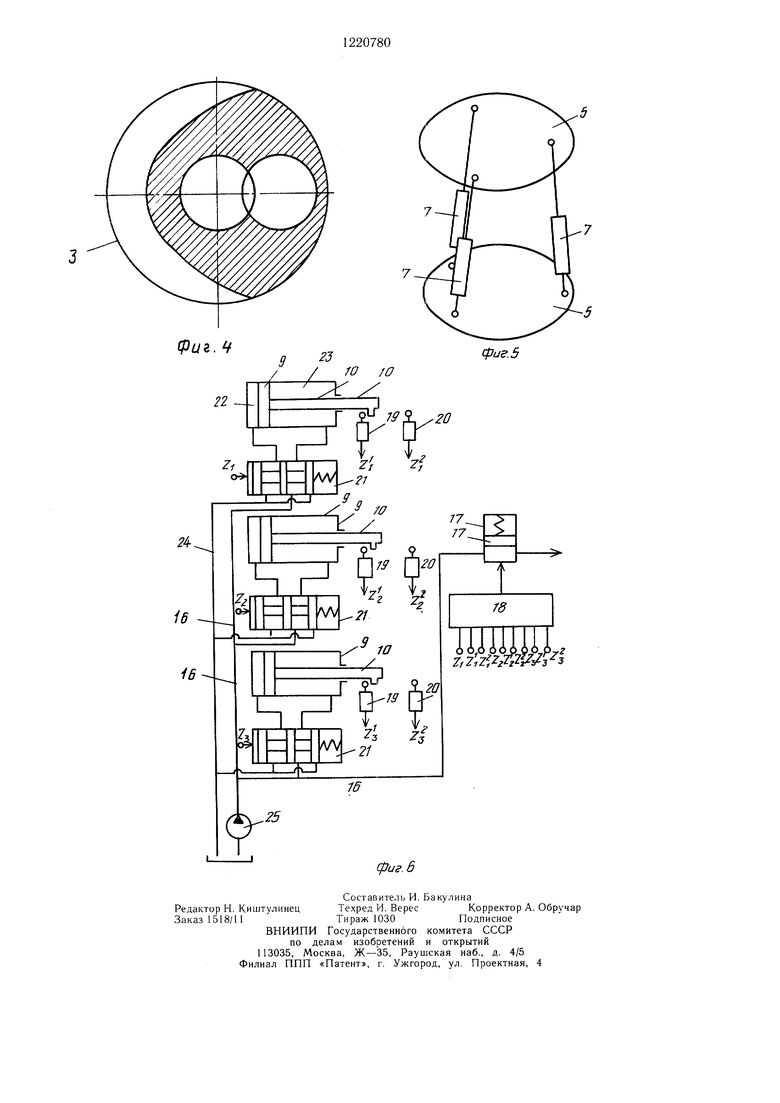
На фиг. изображен манипулятор, общий вид; на фиг. 2 - модуль манипулятора, продольный разрез; на фиг. 3 - перекос платформы модуля относительно сферической опоры; на фиг. 4 - заштрихована поверхность соприкосновения сферической опоры со сферической выемкой платформы при этом перекосе; на фиг. 5 - схема раз- ,ения силовых устройств; на фиг. 6 - схема привода одного из модулей хобота манипулятора.
Манипулятор состоит из идентичных модулей 1, последовательно соединенных друг с другом. Каждый модуль 1 выполнен в виде платформы 2, имеющей сферическую выемку, которая охватывает сферическую опору 3. Сферическая опора 3 подвижно насажена на стержень 4 кинематической поступательной пары, включающей сферическую опору 3 и стержень 4 и связывающей сферическую опору с основанием модуля. Стержень 4 жестко крепится к основанию 5. Кроме того, между основанием 5 и сферической опорой 3 размещен упругий элемент 6.
По периферии модуля установлены силовые устройства 7, например гидравлические цилиндры. Корпуса 8 гидравлических цилиндров 9 шарнирно закреплены на основании 5, а их штоки 10 - на платформе 2.
Модули последовательно соединены друг с другом. Основание одного модуля жестко соединено с платформой смежного модуля. Таким образом, осуществляется взаимосвязь всех модулей, образующих манипулятор, последний модуль которого на платформе несет схват 11.
Между сферической выемкой платформы 2 и сферической опорой 3 каждого модуля образована камера 12, а в платформе 2 и стержне 4 выполнены сквозные каналы 13. Для обеспечения герметичности камеры применены уплотнительная манжета 14, закрепленная на платформе 2 и плотно прилегающая к сферической опоре 3, и манжета 15, закрепленная на сферической опоре и плотно прилегающая к стержню 4.
Камера 12 через сквозной канал 13 соединена с магистралью 16 подачи рабочей среды посредством расг1ределительного элемента 17, связанного с управляющим логическим элементом 18 системы управления (не показана).
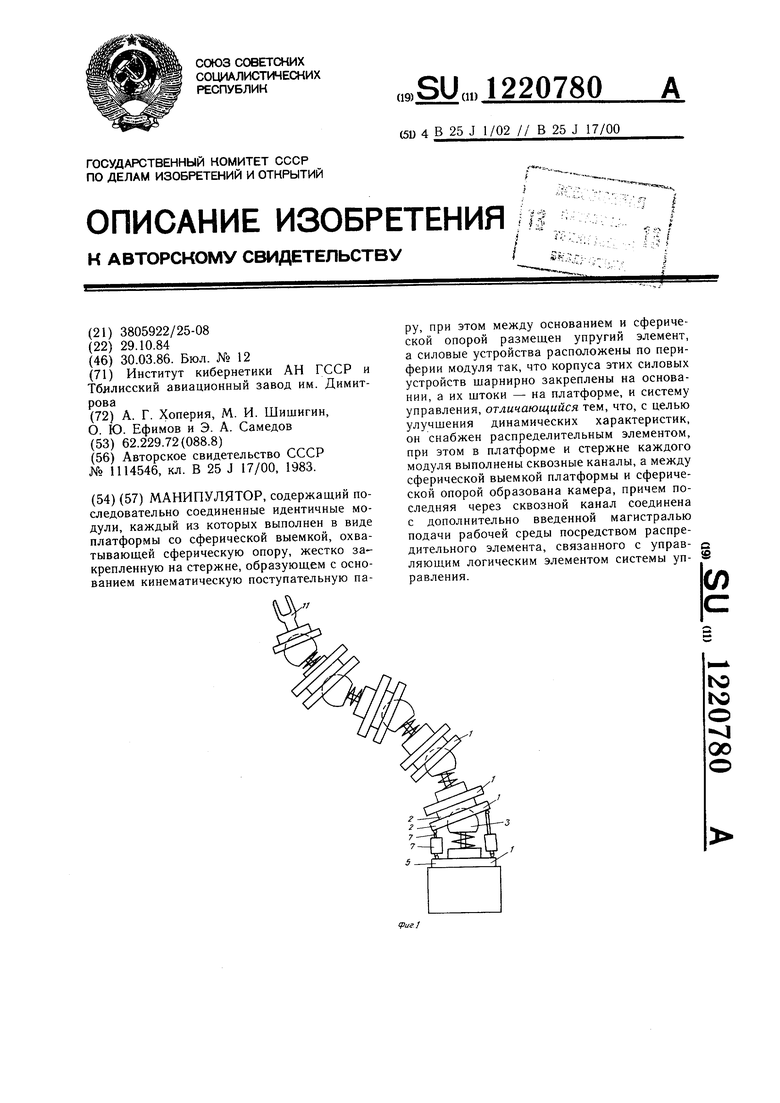
Силовые устройства каждого модуля .1 представляют собой совокупность, например, трех элементарных приводов, для которых двигателями служат, например, гидравлические цилиндры 9, а положение рабочих органов (штоков 10) контролируется с помощью конечных переключателей 19 и 20.
Положение штока 10 определяется состоянием распределителя 21, обеспечиваю- щего соединение полостей 22 и 23 цилиндра 9 с магистралью 16 питания, либо со сбросом 24. Подача под давлением рабочей среды по магистрали 16 происходит при помощи насоса 25.
Входами элементарных приводов служат
О каналы управления Zi, Z2, Za распределителей 21, выходами - выходные каналы Zi, Zf, ZL Zi, Zi Zi конечных переключателей 19 и 20. На входах управляющего логического элемента 18 подключены каналы
управления Z|, Z2, 2з и выходные каналы Zi, Zf, Zi, Zg, Za, Zi конечных переключателей.
Хобот-манипулятор работает следующим образом.
По команде системы управления сраба0 тывает определенная группа силовых устройств 7, штоки 10 которых, выдвигаясь, поворачивают платформы 2 модулей 1 относительно их оснований 5, что позволяет осуществить изгиб манипулятора и придать ему определенную необходимую конфигурацию. Платформы 2 модулей удерживаются штоками 10 силовых устройств и опираются на сферические опоры 3, которые подпружинены пружинами 6 и обеспечивают достаточную жесткость при отработке определенных конфигураций манипулятора.
Рассмотрим работу привода одного из модулей хобота.
Привод характеризуется входами Zi, Zs, Za, воспринимающими сигналы от системы управления, и выходами Zi, Zf, Z2, Zi,
с Zs, Zs, сигналы в которых определяют положение рабочих органов. Сигналы на входах и выходах могут принимать лишь два значения, обозначаемые через «О и «1.
Б схеме на фиг. 6 гидравлические цилиндры 9 управляются двухпозиционными
0 распределителями 21. При Z| 1 левая полость цилиндра соединена с питанием, правая - со сбросом и шток 10 выдвигается из гидравлического цилиндра 9 (Z| Z 0) или полностью выдвинут и сигнал об этом Z I вырабатывается переключателем 20. При Zi О правая полость 23 цилиндра 9 соединена с питанием, левая полость 22 - со сбросом и щток 10 втягивается в цилиндр (Zl Zf 0) или полностью «убран и тогда сигнал об этом Zj 1 вы0 рабатывается переключателем 19.
Управляющий логический элемент 18 реализует булеву функцию
у /f(Z,,Z,,Z3,Zi,z z,,ztz;,Z3 )
(Zi +Z2± Z3i-(Z, + Z2 + Z3)X
V ( 7 72 J TIT S L 5X (Zl/l + + ),
где - операция дизъюнкции;
« -операция конъюнкции; Z - операция инвертирования ( при Z О и Z О при Z 1).
0
5
Каналом управления распределительного элемента 17 служит выход управляющего логического элемента 18, причем при у 1 распределительный элемент открыт, а при у О закрыт.
Перемещения штоков осуществляются в рабочие такты. Рабочий такт характеризуется определенным неизменным значением сигнала на входах элементарных приводов.
«Логика управляющего логического элемента 18 такова, что распределительный элемент 17 закрыт: в том случае, когда штоки 10 силовых устройств занимают предельные устойчивые положения: шток втянут в корпус (исходное состояние), шток выдвинут (второе устойчивое рабочее состояние) ; в рабочий такт, когда все три mjoKa либо одновременно выдвигаются (Zi -j- + Z2 + Zs 0), либо одновременно втягиваются (Zi + Z2 + Zs 0), т. e. когда происходит перемещение платформы вдоль оси симметрии модуля.
Устройство управления подает сигналы на входы двухпозиционных распределителей l(Z, -j- Z2 + Za) (Z, + Z2 + Za) 1, рабочая среда (масло) под давлением поступает в соответствующие полости цилиндров и определенная группа штоков начинает перемещаться.
В период движения штоков 10 йредель- ные переключатели 19 и 20, определяющие
их положение, будут генерировать сигналы Zj . В этот рабочий такт управляющий логический элемент 18 вырабатывает сигнал у 1 и распределительный элемент 17 открывается, рабочая среда под давлением поступает в камеру 12 и обогащает смазочный слой в зоне охвата сферической опоры сферическим углублением платформы модуля. В результате этого трение сферического шарнира уменьшается на весь период движения платформы относительно основания модуля.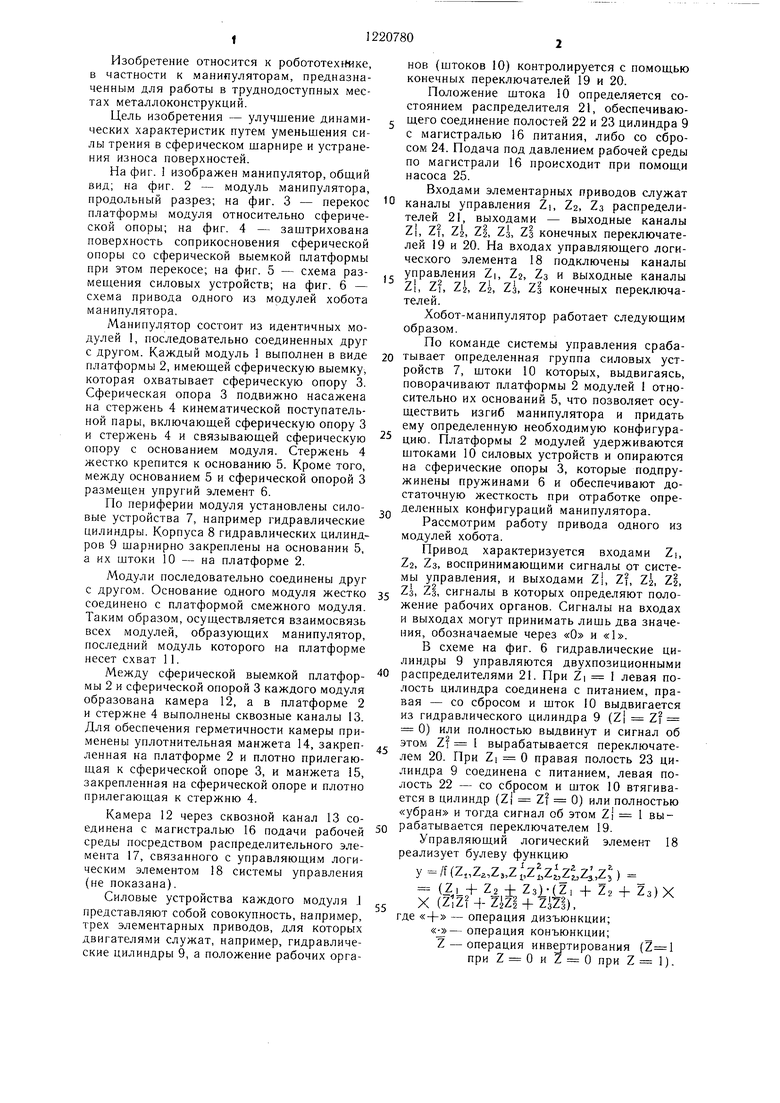
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1227457A1 |
| Устройство для формирования изображения | 1988 |
|
SU1575230A1 |
| Часы | 1973 |
|
SU465616A1 |
| Способ определения параметров изоляции фаз сети с изолированной нейтралью | 1990 |
|
SU1780044A1 |
| Устройство для контроля многовыходных цифровых узлов | 1988 |
|
SU1566353A1 |
| Многофункциональный логический модуль | 1989 |
|
SU1665368A1 |
| Способ измерения толщины листовых изделий | 1988 |
|
SU1728647A1 |
| Сумматор по модулю пять | 1991 |
|
SU1803911A1 |
| Устройство для контроля положения вилочного грузозахвата относительно грузоподдона | 1983 |
|
SU1168905A1 |
| Способ измерения глубины щелей, имитирующих трещины на стандартном образце | 1990 |
|
SU1772718A1 |
фиг.г
13
фиг. 3
Фиг. Ч
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
