Изобретение касается двухпозицион- ных манипуляторов и может быть использовано в машиностроении и приборостроении для автоматизации загрузочно-разгру- зочуых операций при обслуживании сбороч- или другого технологического оборуtj,. изобретения является повышение . точя| уги 5шиционирования за счет упро- укции направляющих.
(Дцения
%
показан манипулятор, общий 10 вид; нй -дфиг.2 - разрез Б-Б на фиг. 1.
На ос11овании 1 манипулятора (фиг.1) (Лакрепл на стойка 2, на которой с возмож- Rt TbFO; iOTOpOTa на осях 3 установлены дву- пле це рычаги 4, одни плечи которых шар- нирно язаны соединительным звеном 5, а на других плечах смонтированы оси 6, на которых установлены направляющие ролики 1, охватывающие с двух сторон ползун 8 с исполнительным органом 9.
На ползуне 8 и соединительном звене 5 п выполнены пазы 10 и 11 соответственно, которые через ползущки 12 и 13 связаны с подпружиненными пружинами 14 и 15 рычагами 16 и 17 перемещений ползуна от кулачков 18 и 19. Кулачки 18 и 19 смонтированы на валу 20, который приводится во 25 вращение электродвигателем через редуктор {не показаны). Кулачки 18 и 19 спрофилированы с учетом необходимых пауз в точках А и Д для надежности захвата деталей 21 из лотка 22 и их установки на рабочую позицию 23. Вертикальные координаты исполнительного органа 9 в точках А и Д определяются упорами 24 и 25, взаимодействующими с ответным упором 26 на стойке 2, а горизонтальные координаты - упором 27, также смонтированным на стойке 2, и профилем кулачка 18.
30
35
Манипулятор работает следующим образом.
п 5
0
Цикл работы манипулятора складывается из следующих одно за другим вертикальных и горизонтальных перемещений по траектории АВСД, совершаемых за время одного оборота вала 20.
В исходном положении, например при захвате деталей 21 из лотка 22 (точка А траектории исполнительного органа 9), под действием кинематической связи: кулачок 18 - рычаг 16 - паз 10, ползун 8 находится в крайнем правом положении, определяемом профилем кулачка 18. Под воздействием рычага 17 от кулачка 19 щарнир- ный параллелограмм, образованный системой рычаги 4 - соединительное звено 5, находится в крайнем левом положении. При этом рычаги 4 повернуты на осях 3 так, что их плечи, несущие ролики 7, опущены вниз. За счет этого охватываемый роликами 7 ползун 8 также опущен вниз до взаимодействия упоров 24 и 26.
При перемещении ползуна 8 по траектории АВ рычаг 17 от кулачка 19 через кулису перемещает щарнирный параллелограмм вправо. Рычаги 4, поворачиваясь на осях 3, поднимают ролики 7 с охватываемым ими ползуном 8 вверх до остановки исполнительного органа 9 в точке В. Величина перемещения АВ определяется профилем приводного кулачка 19.
Далее рычаг 16 посредством кулисы перемещает ползун 8 по роликам 7 влево в точку С до взаимодействия упора 27 с рычагом 16.
Для опускания исполнительного органа 9 в точке Д рычаг 17 через кулису перемещает щарнирный параллелограмм 4-5 влево, при этом рычаги 4, поворачиваясь на осях 3, опускают ролики 7 с ползуном 8 вниз до взаимодействия упоров 25 и 26. Далее цикл повторяется в обратном направлении.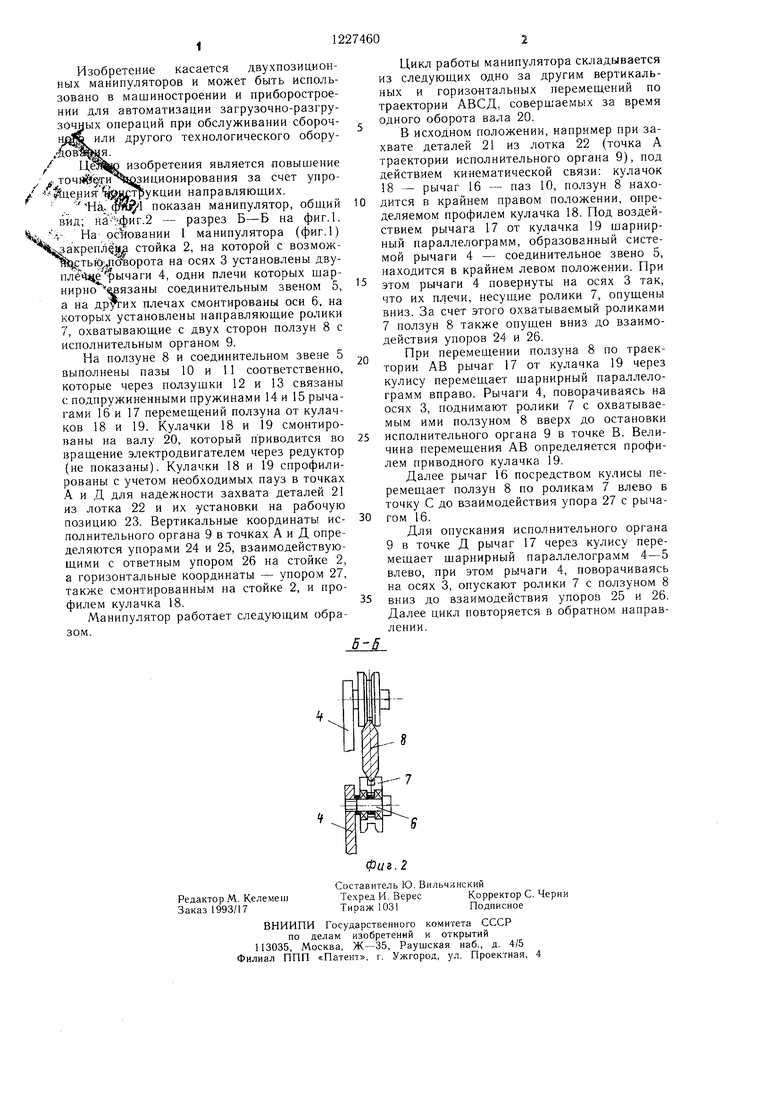
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1263522A1 |
| Манипулятор | 1991 |
|
SU1774914A3 |
| Манипулятор | 1984 |
|
SU1227459A1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2247273C2 |
| Манипулятор | 1986 |
|
SU1380927A1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Манипулятор | 1986 |
|
SU1324843A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |

Фиг,2
Составитель Ю. Внльчинский Техред И. ВересКорректор С. Черни
Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по д-елам изобретений и открытий
113035, Москва, Ж-Зб, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Модуль управления HML | |||
| Рекламный проспект фирмы «Интермодерн, ФРГ, 1982. |
