(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ | 1972 |
|
SU330372A1 |
| Манипулятор | 1975 |
|
SU743861A1 |
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU640841A1 |
| Электрогидравлический привод подачи деревообрабатывающего станка | 1984 |
|
SU1166991A1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| Манипулятор | 1977 |
|
SU666071A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2020298C1 |
| Устройство для автоматического управления двигателем и бесступенчатой трансмиссией самоходной машины | 1985 |
|
SU1350048A1 |
| Устройство для управления манипулятором | 1976 |
|
SU692722A1 |
| ЗАХВАТ ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1971 |
|
SU290825A1 |
1
Изобретение относится к машиностроению, а именно к копирующим манипуляторам, предназначенным, в частности, для механизации погрузочно-разгрузочных работ, установки и снятия тяжелых деталей при обслуживании металлообрабатывающих станков, монтажно-сборочных работ и т. д.
Известен манипулятор, в котором управление осуществляется от задающего механизма, расположенного на общем с исполнительным органом элементе 1.
Недостатком манипулятора является низкая точность выполнения работ, обусловленная применением в приводе релейного управления и удаленностью оператора от объекта.
Наиболее близким техническим решением к предлагаемому является манипулятор, в котором содержатся многозвенные шарнирно сочлененные исполнительный и смонтированный на одном из его звеньев и кинематически связанный со смежным звеном задающий органы, и сервопривод с датчиками 2.
Недостатки манипулятора заключаются в том, что он не обладает достаточной точностью позиционирования и надежностью работы.
Цель изобретения - повышение точности позиционирования и надежности работы.
Указанная цель достигается тем, что задающий орган снабжен ползуна.ми, установленными с возможностью перемещения 5 параллельно смежным звеньям, и соединен с этими ползунами перпендикулярно расположенными направляющими, при этом каждый ползун связан с датчиком сервопривода.
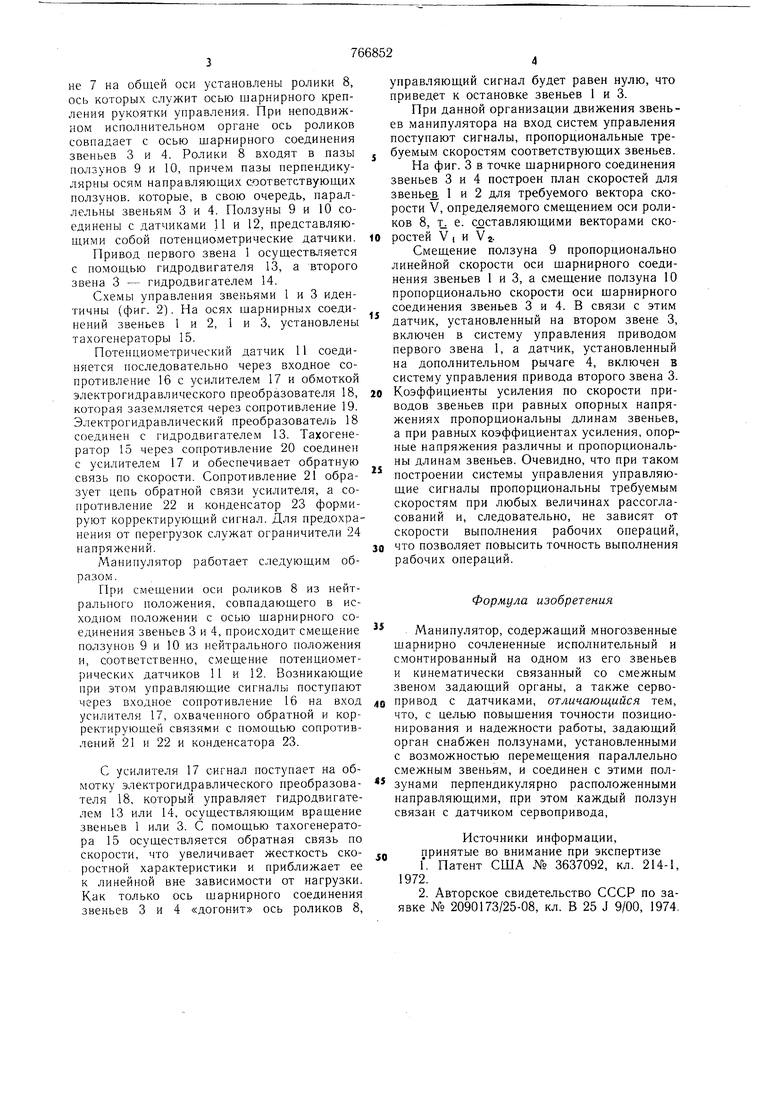
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - система управления 10 звеном задающего органа манипулятора; на фиг. 3 - задающий орган манипулятора.
Манипулятор состоит из первого звена 1, щарнирно установленного на основании 2, и второго звена 3, шарнирно соединенного со звеном 1. На звене 3 установлен дополнительный рычаг 4, соединенный со звеном 1 с помощью рычага 5, образующий вместе со звеньями 1, 3 и рычагом 4 передаточный механизм с передаточным числом, равным единице (параллелограмм). В других вариантах исполнения в качестве передаточного механизма применяют цепные передачи, ременно-зубчатые и т. д.
На звене 3 шарнирно закреплены два шарнирно сочлененных звена 6 и 7. На звене 7 на общей оси установлены ролики 8, ось которых служит осью шарнирного крепления рукоятки управления. При неподвижном исполнительном органе ось роликов совпадает с осью шарнирного соединения звеньев 3 и 4. Ролики 8 входят в пазы ползунов 9 и 10, причем пазы перпендикулярны осям направляюш.их соответствующих ползунов, которые, в свою очередь, параллельны звеньям 3 и 4. Ползуны 9 и 10 соединены с датчиками 11 и 12, представляющими собой потенциометрические датчики. Привод первого звена 1 осуществляется с помощью гидродвигателя 13, а второго звена 3 - гидродвигателем 14.
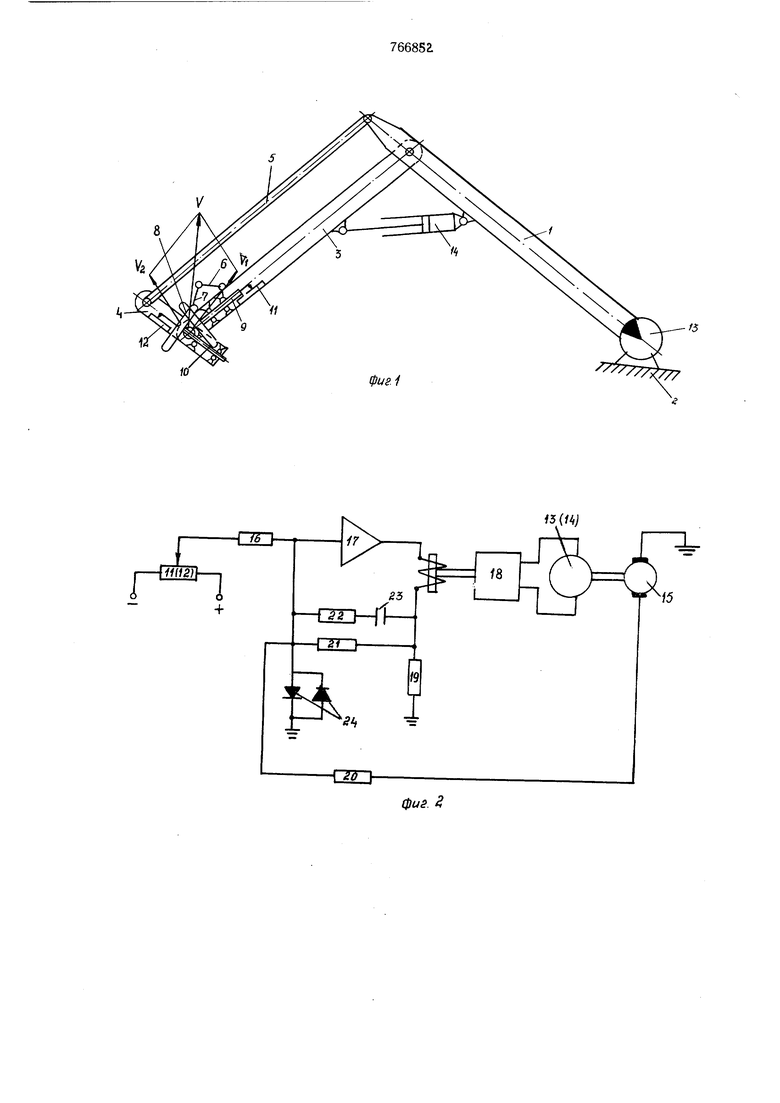
Схемы управления звеньями 1 и 3 идентичны (фиг. 2). На осях щарнирных соединений звеньев 1 и 2, 1 и 3, установлены тахогенераторы 15.
Потенциометрический датчик 11 соединяется последовательно через входное сопротивление 16 с усилителем 17 и обмоткой электрогидравлического преобразователя 18, которая заземляется через сопротивление 19. Электрогидравлический преобразователь 18 соединен с гидродвигателем 13. Тахогенератор 15 через сопротивление 20 соединен с усилителем 17 и обеспечивает обратную связь по скорости. Сопротивление 21 образует цепь обратной связи усилителя, а сопротивление 22 и конденсатор 23 формируют корректирующий сигнал. Для предохранения от перегрузок служат ограничители 24 напряжений.
Манипулятор работает следующим образом.
При смещении оси роликов 8 из нейтрального положения, совпадающего в исходном ноложении с осью щарнирного соединения звеньев 3 и 4, происходит смещение ползунов 9 и 10 из нейтрального положения и, соответственно, смещение потенциометрических датчиков II и 12. Возникающие при этом управляющие сигналы поступают через входное сопротивление 16 на вход усилителя 17, охваченного обратной и корректирующей связями с помощью сопротивлений 21 и 22 и конденсатора 23.
С усилителя 17 сигнал поступает на обмотку электрогидравлического преобразователя 18, который управляет гидродвигателем 13 или 14, осуществляющим вращение звеньев 1 или 3. С помощью тахогенератора 15 осуществляется обратная связь по скорости, что увеличивает жесткость скоростной характеристики и приближает ее к линейной вне зависимости от нагрузки. Как только ось щарнирного соединения звеньев 3 и 4 «догонит ось роликов 8,
управляющий сигнал будет равен нулю, что приведет к остановке звеньев 1 и 3.
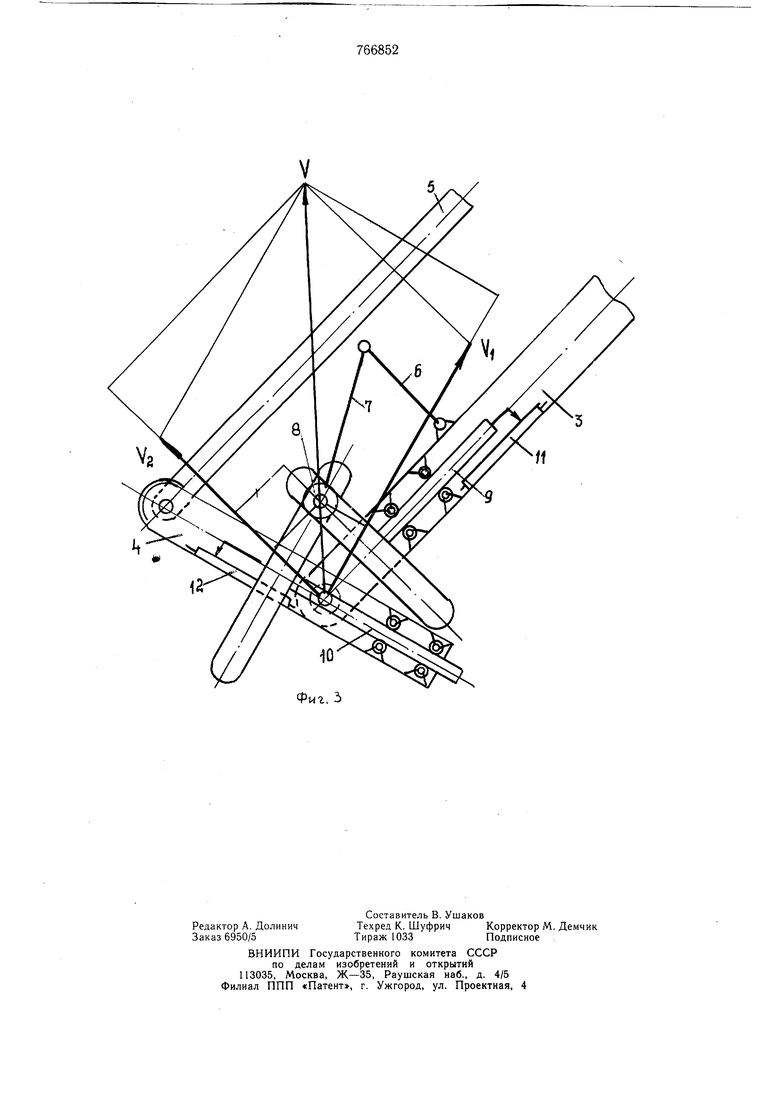
При данной организации движения звеньев манипулятора на вход систем управления поступают сигналы, пропорциональные требуемым скоростям соответствующих звеньев. На фиг. 3 в точке щарнирного соединения звеньев 3 и 4 построен план скоростей для звеньев 1 и 2 для требуемого вектора скорости V, определяемого смещением оси роликов 8, т. е. составляющими векторами скоростей V 1 и УгСмещение ползуна 9 пропорционально линейной скорости оси щарнирного соединения звеньев 1 и 3, а смещение ползуна 10 пропорционально скорости оси щарнирного соединения звеньев 3 и 4. В связи с этим датчик, установленный на втором звене 3, включен в систему управления приводом первого звена 1, а датчик, установленный на дополнительном рычаге 4, включен в систему управления привода второго звена 3.
Коэффициенты усиления по скорости приводов звеньев при равных опорных напряжениях пропорциональны длинам звеньев, а при равных коэффициентах усиления, опорные напряжения различны и пропорциональны длинам звеньев. Очевидно, что при таком построении системы управления управляющие сигналы пропорциональны требуемым скоростям при любых величинах рассогласований и, следовательно, не зависят от скорости выполнения рабочих операций,
а что позволяет повысить точность выполнения рабочих операций.
Формула изобретения
Манипулятор, содержащий многозвенные щарнирно сочлененные исполнительный и смонтированный на одном из его звеньев и кинематически связанный со смежным звеном задающий органы, а также сервопривод с датчиками, отличающийся тем, что, с целью повыщения точности позиционирования и надежности работы, задающий орган снабжен ползунами, установленными с возможностью перемещения параллельно смежным звеньям, и соединен с этими ползунами перпендикулярно расположенными направляющими, при этом каждый ползун связан с датчиком сервопривода.
Источники информации, принятые во внимание при экспертизе
Г. Патент США № 3637092, кл. 214-1, 1972.
фиг. S
