с оо о со ю
Изобретение относится к машиностроению и может быть использовано в манипуляторах для автоматизации за- грузки-раэгрузки технологического оборудования.
Целью изобретения является расши- peime функциональных возможностей за счет обеспечения регулировки угла по ворота механической руки.
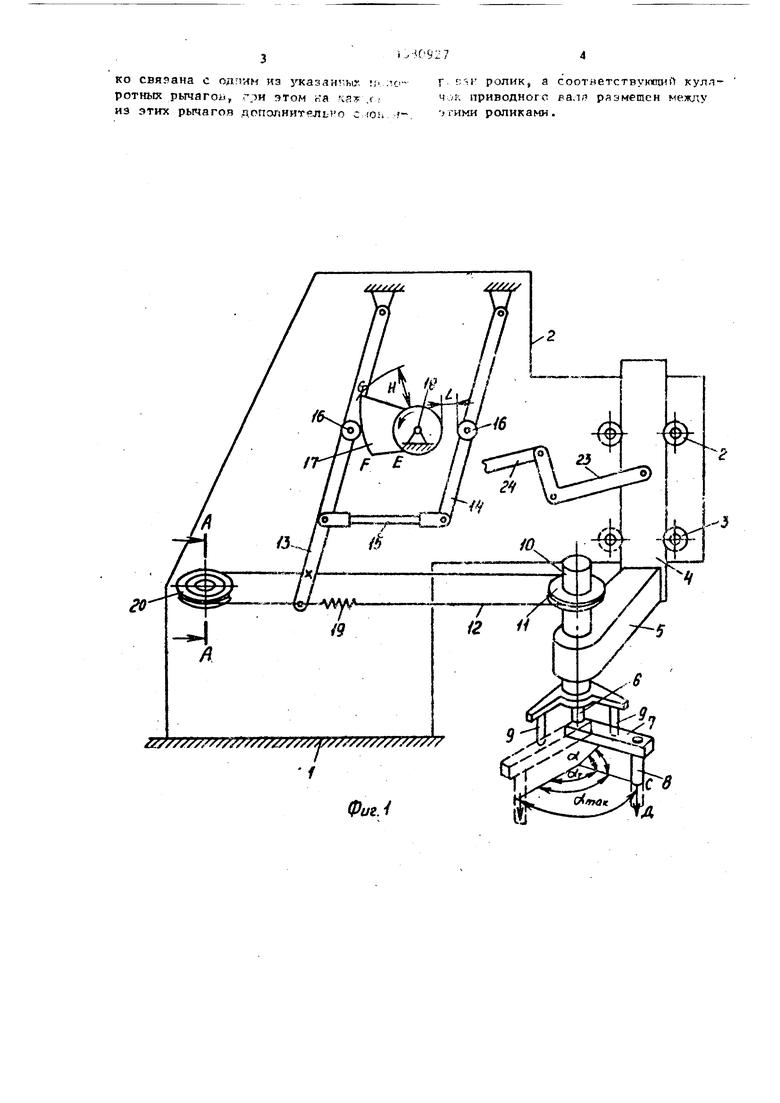
iia фиг,1 изображен манипулятор, общий вид, на фиг.2 - разрез А-А на .1.
На основании 1 (фиг,1) манипулятора закреплена стойка ., на которой в направляющих роликах 3 размещен ползун Д с корпусом 5 н опорами вра- щспип вала 6, на конце которого смонтировано тшечо 7 механической руки со схватом 8, Поворот плеча 7 ограничен регулируемыми упорами 9. На другом конце вала 6 установлена фрикционная муфта 10 со шкивом 11, который гибким элементом 12 связан с рычаж- ю-гаарнирной системой, состоящей из рычагов 13, 14 и регулируемой по длине тяги 15.
На рьгтагах 13 и 1А установлены ро- 16, охватьтакяцие с двух сторон кулачок 17, укрепленный на приводном. аапу 18 с зазором L, Величина L регулируется под требуемый угол поворота плеча 7 руки тягой 15. Пружина 19 осуществляет натяжение гибкого элемента 12, одна ветвь которого закреплена на рьгчаге 13. Шкив 20 установлен I l оси 21 и поджат к основанию 1 пружиной 22,
Вертикйльное перемещение ползуну 4 сообтаегся рычагом 23, который по- средством тяги 2А связан с соответствующим кулачком, закрепленным на распределительном валу 18.
Работа манипулятора сострит из следукщих друг за другом поступательных и поворотных перемещений плеча 7 по траектории АВСД (фиг,1)| совершае- Miiix за время одного оборота вала 18.
Движение схвата 8 на отрезках АВ, ВЛиСД.ДС осуществляется перемещением ползуна А в роликах 3, сообщаемым рьгчагом 23 и тягой 24 от соответству- (одего кулачка приводиого вала 18, При плечо 7 прижато к одному из упоров 9. .
Величина зазора L отрегулирована тягой 15 так, чтобы подход плеча 7 к упору 9 совпал с выходом ролика 16 на участок профиля кулачка 17, бллго
,
Ю
15 , 20 25
30 jj
40
50
5
даря чему сила встречного улара плеча 7 об упор 9 будет минимальной. Из- литск хода кулачка 17 компенсируется фрикционной муфтой 10 о
До встречи крутой части EF профиля кулачка 17 с роликом 16 противоположного рычага 13 вся рьр4ажная система остается в том же положении, в каком она нахоД1шасъ в момент прекращения контакта участка FG профиля кулачка 17 с роликом 16 рычага 14, Это обеспечивается подторматкиваинем пткивз 20, поэтому поворот в иапраплении СВ начнется после выбора зазора L п обратном направлении в том же порядке, что и поворот в иаггравлеипи ВС.
Величина перепада пысот Н на при филе кулачка 17 вьтопнена с расчетом на максимальный угол поворота oi „цс плеча 7. При перцналадке на любой требуемый угол поворота ot вначале регулируют упоры 9, а затем регулируют тягой 15 зазор L так, чтобы соответствующий ему угол о/L составлял в сумме с уг ом d максимальный угол поворота
Таким образом, при неизменном кулачке 17 можно получить плавньй раз- гон и безударную остановку плеча 7 при любом требуемом угле поворота
тФормула изобретения
Манипулятор, содержащий основание., смонтированные в нем приводной вал с двумя кулачками и механическую руку с рычажно-шарнирными механизмами ее подъема и поворота, взаимодействующими с соответствующими кулачпани, причем механизм поворота снабжен фрикционной муфтой, а на основании имеются упоры механической руки, -о т л и- }1ающийся тем, что, с целью распшрения функциональных возможностей за счет обеспечения регулировки угла поворота механической руки, ры- чажно-шарн}фньй механизм поворота содержит регулируемую по длине тягу, два шкива, кинематически связанных мезвду собой с помощью гибкого элемента, и два поворотных рычага, шарнир- но связан1шх одним своим концом с основанием, а другим - с регулируемой тягой, 1тричем один из указанных шки- ВОВ смонтирован на основании, а второй шкив закреплен на фрикционной муфте, и ветвь гибкого элемента жест™
ко связана с одггим кэ 5т азант-ыг, :;.
ротных рыча г oi), гзн этом ка чяу ,f ,
из этих рычагов допог1Нит ль о с (оь г. г; ,г ролик, а соответствующий кулл- чок приводного BB.ifl рдэмещен меж;ту роликами.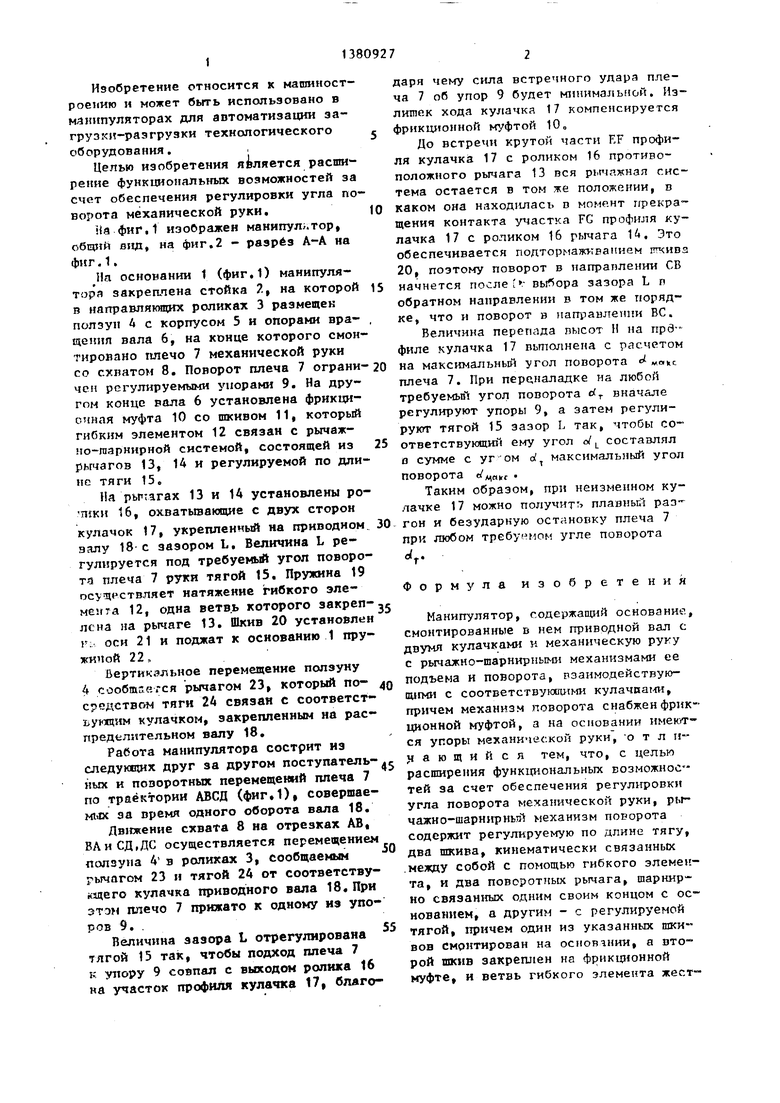
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1991 |
|
SU1774914A3 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Установка для сварки | 1990 |
|
SU1756084A1 |
| Манипулятор | 1988 |
|
SU1569223A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Манипулятор | 1982 |
|
SU1060465A1 |
| Манипулятор | 1977 |
|
SU655522A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах для автоматизации загрузки-разгрузки технологического оборудовать. Целью изобретения Является расширение функциональных возможностей за счет обеспечения регу лировки угла поворота механической руки. При вращении приводного вала 18 от кулачка 17 через рычаги 13 и 14 и далее через гибкий элемент ,12 и фрикционную муфту 10 осуществляется поворот плеча 7 механической руки со схватом 8 между упорами 9. Подъем ,схвата 8 осуществляется от соотвёт ствующего кулачка вала 18 через рьма- ги 23 и 24, ползун 4 и корпус 5, Зазор L между Кулачком 17 и роликами 16 размещенными на рычагах 13 и 1А, регулируется тягой 15о 2 ил. г (Л
Фиг.
Фиг. 2
| Устройство для захвата и переноса деталей | 1976 |
|
SU582085A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
