«
Изобретение относится к области дробеметной обработки деталей.
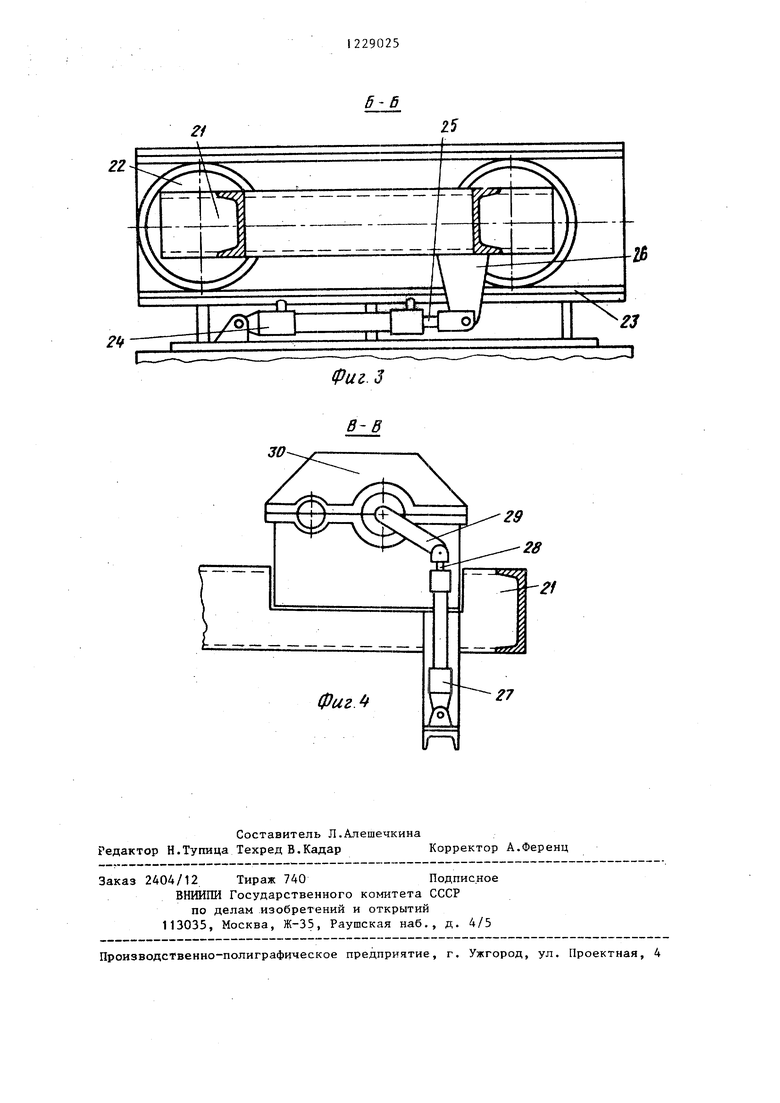
Цель изобретения - повьппение качества обработки путем выполнения средства для транспортировки деталей таким образом, что оно не загораживает движение дроби к обрабатываемой поверхности детали.
На фиг. 1 представлена установка, общий вид; на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2.
Установка для непрерывной очистки содержит камеру 1 проходного типа изготовленную из металлических панелей и разделенную на предкамеру 2, дробеметную камеру 3, разгрузочное отделение 4 для выхода деталей 5, дробеметные аппараты 6, установленные на потолке дробеметной камеры 3, средство для транспортировки деталей, выполненное в виде балки 7 и ряда захватов 8, при этом балка 7 горизонтально расположена внутри камеры 1 вдоль ее продольной оси и свободно установлена на катках 9, за крепленных в кронштейнах 10, жестко связанных с подъемной платформой 11, размещенной на подвижном основании 12, выполненном в виде цилиндра, установленного вертикально в роликовых опорах 13, размещенных под углом 120.
Установка содержит также привод шагового возвратно-поступательного перемещения, установленный на платформе 11, снабженный гидроцилиндром 14, шток 15 которого связан с балкой 7, и привод вертикального перемещения балки 7, выполненный в виде гидроцилиндра 16, установленного на основании 17, причем шток 18 гидроцилиндра 16 соединен с платформой 11.
В предкамере 2 установлено два стеллажа 19 для укладки деталей 5, размещенных по обе стороны балки 7, при этом несущие поверхности стеллажей подняты над балкой 7 на величину не более величины ее вертикального перемещения.
Захваты 8 выполнены в виде повод- ковьрс центров, смонтированных в стенах камеры 3 и разгрузочного отделения с возможностью вращения и предназначенных для зажима деталей 5, при этом захваты 8 установлены в подшипниках 20, закрепленных на опор29025 2
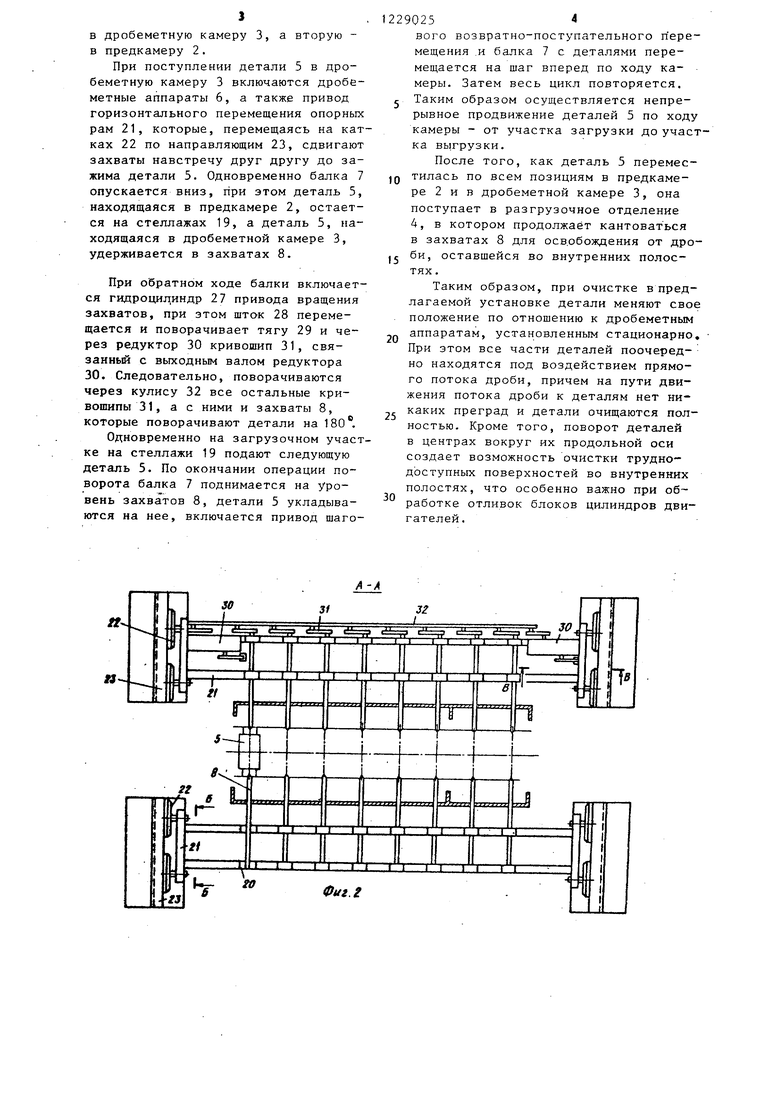
ной раме 21, снабженной приводом горизонтального перемещения и установленной на катках 22, размещенных в направляющих 23, причем привод гори; зонтального перемещения опорной рамы 21 включает гидроцилиндр 24, шток 25 которого шарнирно соединен кронштейном 26 с опорной рамой 21. Концы захватов 8, выведенные наружу каме10 ры, соединены с приводом вращения, закрепленным на опорной раме 21, и обеспечивают возможность синхронного поворота захватов 8 на 180 . Привод вращения состоит из гидроцилинд- tS pa 27, шток 28 которого посредством тяги 29 соединен с редуктором 30, связанным с многозвенным кривошип- но-шатунным механизмом, включакщим кривошипы 31, связанные с концами
20 захватов 8, и общую кулису 32, связанную с кривошипами 31.
Гидроцилиндр 27 и редуктор 30 закреплены на опорной раме 21. В исходном положении балка 7 опущена и
25 находится в крайнем левом положении, захваты 8 отведены к стенам камеры, дробеметные аппараты 6 выключены.
Установка работает следующим образом,
3JJ Первую обрабатываемую деталь 5 укладывают посредством средств механизации на стеллажи 19 со стороны загрузочного конца так, чтобы торцы ее были обращены к захватам 8. Включают гидропривод вертикального перемещения балки 7. При движении штока 18 гидроцилиндра 16 вверх поднимается платформа 11 со всеми установленными на ней механизмами, при этом подвижное основание 12 платформы 11 перемещается в роликовых опорах 13, одновременно осуществляя и подъем балки 7„ при этом деталь 5 укладывается на балку 7.
После этого включают привод шагового возвратно-поступательного перемещения, шток 15 гидроцилиндра 14, смещаясь на шаг по ходу камеры, перемещает балку 7 вместе с деталью 5 из зоны загрузки в предкамеру 2. Затем включают гидроцилиндр 16 и опускают балку 7, при этом деталь 5 остается на стеллажах 19 и в предкамере 2. Одновременно на стеллажи 19 в зоне загрузки поступает вторая
5- деталь 5. Балка 7 совершает следующий цикл подъема и возвратно-поступательного перемещения по ходу камеры и транспортирует первую деталь 5
35
40
45
50
в дробеметную камеру 3, а вторую - в предкамеру 2.
При поступлении детали 5 в дробеметную камеру 3 включаются дробе- метные аппараты 6, а также привод горизонтального перемещения опорных рам 21, которые, перемещаясь на катках 22 по направляющим 23, сдвигают захваты навстречу друг другу до зажима детали 5. Одновременно балка 7 опускается вниз, при этом деталь 5, находящаяся в предкамере 2, остается на стеллажах 19, а деталь 5, находящаяся в дробеметной камере 3, удерживается в захватах 8.
При обратном ходе балки включается гидроцил.индр 27 привода вращения захватов, при этом шток 28 перемещается и поворачивает тягу 29 и через редуктор 30 кривошип 31, связанный с выходным валом редуктора 30. Следовательно, поворачиваются через кулису 32 все остальные кривошипы 31, а с ними и захваты 8, которые поворачивают детали на 180
Одновременно на загрузочном участке на стеллажи 19 подают следующую деталь 5. По окончании операции поворота балка 7 поднимается на уровень захватов 8, детали 5 укладываются на нее, включается привод шаго10
229025
вого возвратно-поступательного п ере- мещения .и балка 7 с деталями перемещается на шаг вперед по ходу камеры. Затем весь цикл повторяется, с Таким образом осуществляется непрерывное продвижение деталей 5 по ходу камеры - от участка загрузки до участка выгрузки.
После того, как деталь 5 переместилась по всем позициям в предкамере 2 и в дробеметной камере 3, она поступает в разгрузочное отделение 4, в котором продолжает кантоват ься в захватах 8 для осв.обождения от дро- и би, оставшейся во внутренних полостях .
Таким образом, при очистке в предлагаемой установке детали меняют свое положение по отношению к дробеметным аппаратам, установленным стационарно, При этом все части деталей поочередно находятся под воздействием прямого потока дроби, причем на пути движения потока дроби к деталям нет никаких преград и детали очищаются полностью. Кроме того, поворот деталей в центрах вокруг их продольной оси создает возможность очистки труднодоступных поверхностей во внутренних полостях, что особенно важно при обработке отливок блоков цилиндров двигателей.
20
25
30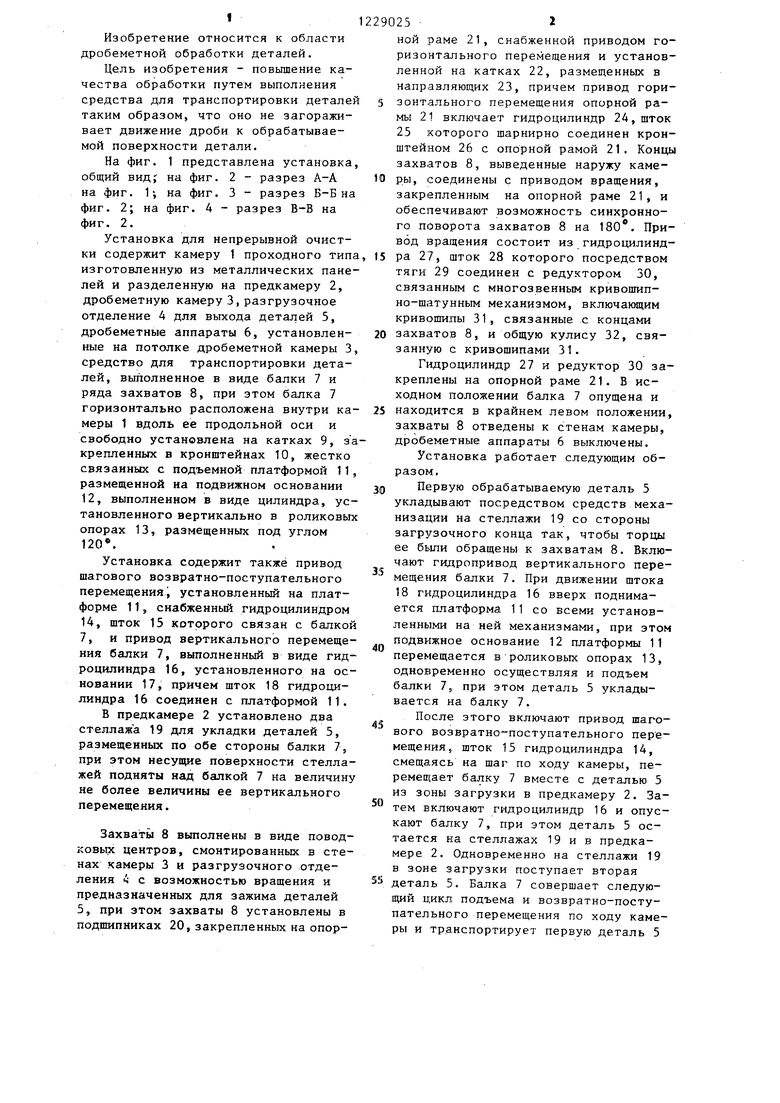
| название | год | авторы | номер документа |
|---|---|---|---|
| Дробеметная установка для упрочнения деталей | 1988 |
|
SU1801729A1 |
| Разгрузочное устройство шахтной печи для обжига карбонатных материалов | 2017 |
|
RU2656314C1 |
| Линия металлизации проката | 1982 |
|
SU1047991A1 |
| Дробеметная установка | 1984 |
|
SU1201116A1 |
| Устройство для смены рабочих и опорных валков универсальной прокатной клети кварто | 1981 |
|
SU971542A1 |
| Установка для дробеметной обработки | 1979 |
|
SU891401A1 |
| Дробеметная установка для обработки деталей типа труб | 1980 |
|
SU952560A1 |
| Дробеметная камера для очисткиКРупНОгАбАРиТНыХ издЕлий | 1978 |
|
SU846253A1 |
| Устройство для вибрационной обработки | 1983 |
|
SU1087312A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ КОНТЕЙНЕРОВ | 2024 |
|
RU2831750C1 |
иФиг.З
27
| Патент США № 3626641, кл | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
