Изобретение относится к подъемно- транспортному машиностроению, а именно к самоходным манипуляторам для подъемя(-трансг1Ортиых работ.
Цель изобретения - повышение производительности при работе манипулятора со штучньми грузами.
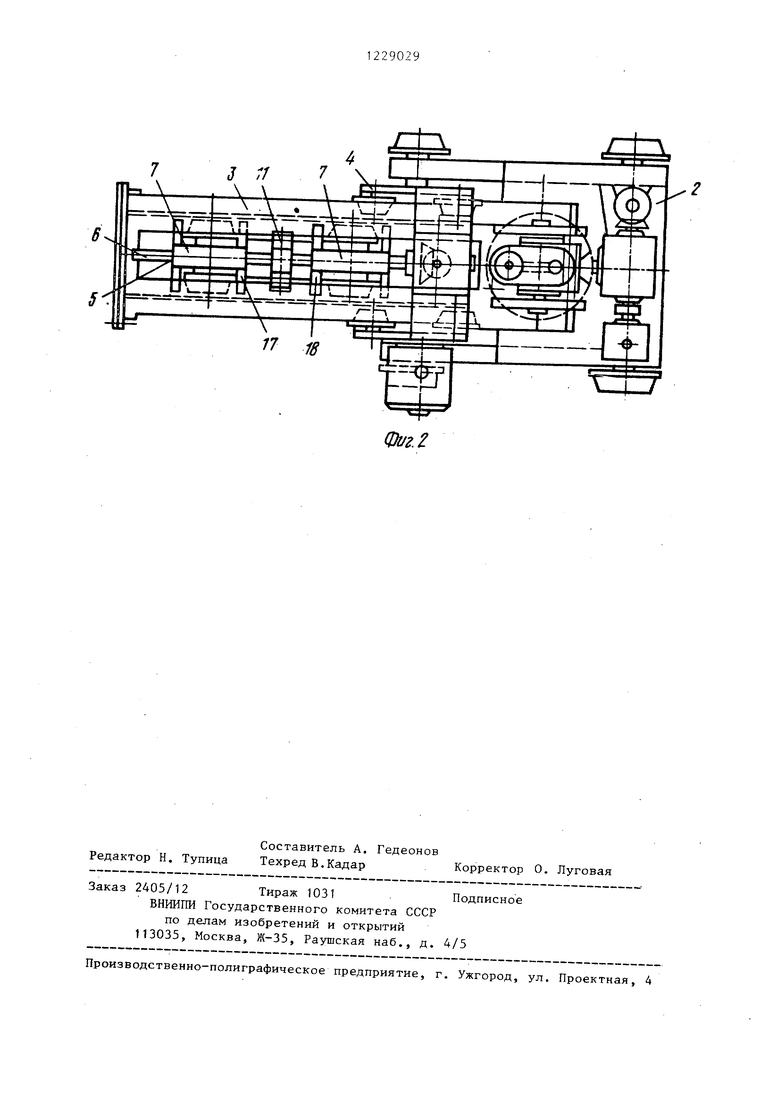
На фиг„ 1 изображен манипулятор общий ВИД;, на фиг„ 2 -- то же 5 ВЩ1 сверху.
Манипулятор для погрузочно раз- грузочных работ содержит колонну 1, установленную на тележке 2 и несущую подвижную вдоль колонны 1 стрелу 3. На стреле 3 установлена подв;ижная каретка 4, винтовые пары 5, включающие в себя винт 6j расположенный вдоль стрелы 3 и закрепленньм концом на каретке 4, и гайки 7, надетые на винт 6.
Грузозахватный орган 8 крана включает в себя клещеобразные рьшаги 9, пьшолненные с продольными прорезями 10, На винте 6 установлена вертикально направляющая 11 между гайками 7, выполненная с осью 12 в нижней части Ось 12 частично распололсена в прорезях 10 рычагов 9 Рычаги 9 стягиваются между собой пружиной 13. На концах рычагов 9 смонтированы захватные головки 14 для штучных грузов 15 Головки 14 установлены с возможность поворота относительно горизонтальной
292
оси и снабжены приводом 16 их поворота, установленным на одном из рычагов 9,
Г айки 7 установлены на подвижных
каретках 17 и 18, перемещающихся по стреле 3. Концы рычагов 9 шарнирно соединены с каретками 17 и 18. Кониьг винта 6 соединены кинематически с приводом 19 его вращения, установленным на каретке 4. Колонна 1 может быть выполнена поворотной.
Манипулятор работает следующим образом.
Тележка 2 перемещается по основанию. Расположение тележки 2 с колонной в пространстве относительно основания может быть любым. Высота расположения стрелы 3 на колонне 1 регулируется с помощью привода. Захват} ые рычаги 9 могут быть расположены под стрелой 3 или над ней. Положение рьмагов 9 на стреле 3 регулируется подвижной кареткой 4. Для приведения рьмагов 9 в действие вращают
винт 6, при этом в зависимости от
направления вращения гайки 7 удаляются одна от другой или сближаются. Рычаги 9 поворачиваются при этом относительно оси 12 направляющей 11,
разжимая или зажимая груз 15. Для
манипулирования грузом 15 относительно рычагов 9 предназначены захватные головки 14,
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| Устройство для установки и снятия штампов | 1977 |
|
SU725903A1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| Манипулятор | 1982 |
|
SU1114549A1 |
| РОБОТ-МАНИПУЛЯТОР ДЛЯ ПОКРАСКИ ИЗДЕЛИЙ | 2003 |
|
RU2263020C2 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Манипулятор | 1984 |
|
SU1222536A1 |
« г Vb
7J Г/ 7 | . . ,
h , 1 W ., Jb г Г пл ЛП - LlZi teE.r
г±л
| Гидравлический грузоподъемный кран | 1979 |
|
SU856967A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
