t12
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для программного управления кранами, и может быть использовано в устройствах для горизонтально- го наведения грузозахватных органов кранов мостового типа.
Цель изобретения - повышение точности горизонтального наведения грузозахватного органа крана мостового типа.
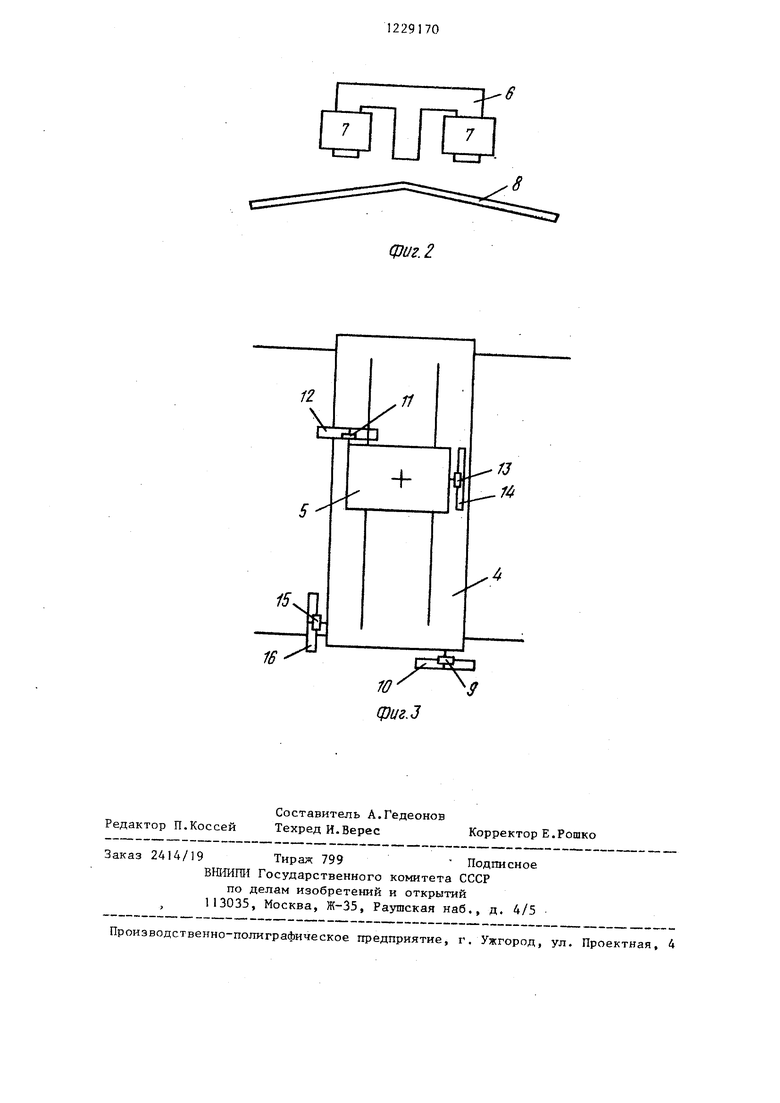
На фиг. 1 показана хтринципиальная схема электрического устройства для горизонтального наведения грузоза хватного органа крана мостового типа на фиг,2 - дифференциальный датчик устройства, общий вид| на фиг.З - расположение датчиков на кране.
Устройство для горизонтального наведения грузозахватного органа крана мостового типа содержит коман- доаппарат 1, подключенный через резистор 2 и коммутатор 3 к управляющему входу привода механизма передвижения моста 4 крана или грузовой тележ- ки 5, несущий грузозахватный орган (не показано),
Дифференциальные датчики положения включают в себя каждый Ш-образ- ный магнитопрсвод 6, на внешних стерж нях которого размещены обмотки 7. Датчик взаимодействует с экраном 8, выполненным Л-образным. Устройство предназначено для наведения, грузозахватного органа вдоль продольной или поперечной оси крана. Для наведения грузозахватного органа вдоль обеих осей следует применять два устройства, управляющих соответственно механизмами передвижения тележки 5 и моста 4. Устройство для наведения грузозахватного органа вдоль продольной оси крана управля€ т механизмом передвижения моста 4 и включает в себя датчик 9 моста с экраном 10 на его пути и датчик 11 тележки 5 с экраном 12 на ее пути. Устройство для наведения грузозахватного органа вдоль поперечной оси крана управляет механизмом передвижетдая тележки 5 и включает в себя датчик 13 тележки 5
702
с экраном 14 на ее пути и датчикТ5 моста с экраном 16 на его пути.
Обмотки 17 и 18 датчиков 9 и И включены по схеме электрического моста вместе с потенциометрами 19, вы- ход моста через усилители 20 и 21 подключен к пороговым элементам, выполненным в виде реле 22 и 23, контакты 24 и 25 которых включены последовательно с обмоткой 26 коммутатора 3, контакт 27 которого включен параллельно контактам 24 и 25, Выход электрического моста через блок определения смещения грузозахватного органа вдоль одной из горизонтальных осей, выполненный в виде фазочувстви- тельного выпрямителя 28, и коммутатор 3 подключены к управляющему входу привода соответствующего механизма передвиясения, Размыкаюпр й контакт 29 реле 22 включен параллельно резистору 2, являющемуся задатчиком скорости дотягивания механизма передвиже ния.
Устройство для горизонтального наведения грузозахватного органа крина мостового типа работает следующим образом,
Для наведения грузозахватного органа вдоль продольной оси крана задатчиком 1 определяют скорость передвижения моста 4. При подходе датчика 9 к экрану 10 на выходе электрического моста появляется напряжение, которое включает реле 22, размыкающее контакт 29, при этом вводится резистор 2 и скорость моста 4 уменьшается. При увеличении напряжения на выходе электрического моста включае р- ся реле 23, при этом получает питание обмотка 26 коммутатора 3 и его KOHTSiKTb подключают к управляющему входу привода механизма передвижения моста 4. Фазочувствительный выпрямитель 28 осуществляет дотягивание механизма до точного наведения грузозахватного органа.
Аналогично работает устройство при наведении грузозахватного органа вдоль поперечной оси крана.
12
фиг. 2
П
4/J.п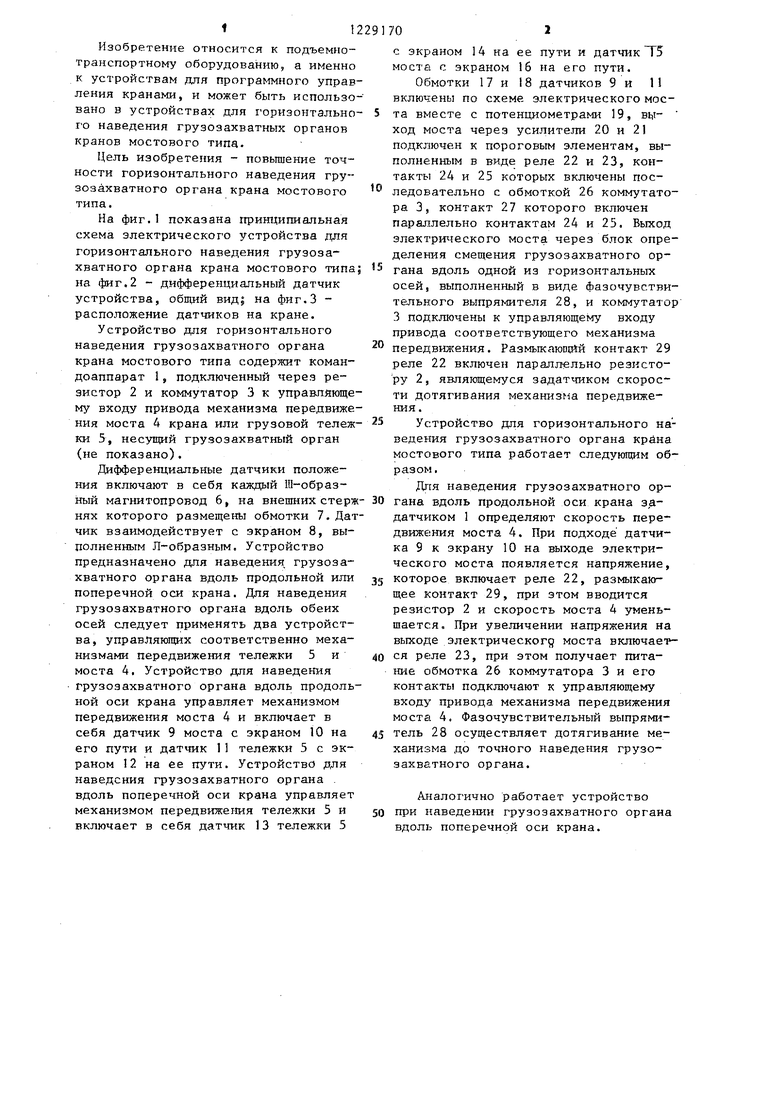
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер мостового крана | 1980 |
|
SU1037322A1 |
| Способ определения координат мостового крана | 2021 |
|
RU2767796C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Мостовой кран для обслуживания алюминиевых электролизеров | 1983 |
|
SU1148905A1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| Стенд для сборки мостовых кранов | 1981 |
|
SU1006362A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |

16
Составитель А.Гедеонов Редактор П.Коссей Техред И.ВересКорректор Е.
Заказ 2414/19 Тираж 799 Подписное
ВШШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
| Устройство для контроля положения крана мостового типа | 1980 |
|
SU965967A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
