Изобретение относится к устройствам автоматического регулирования режимов нагружения землеройных машин с активным рабочим органом, в частности транше йных экскаваторов j котлованных машин.
Целью изoбpeтeнIiя является повышение производительности машины.
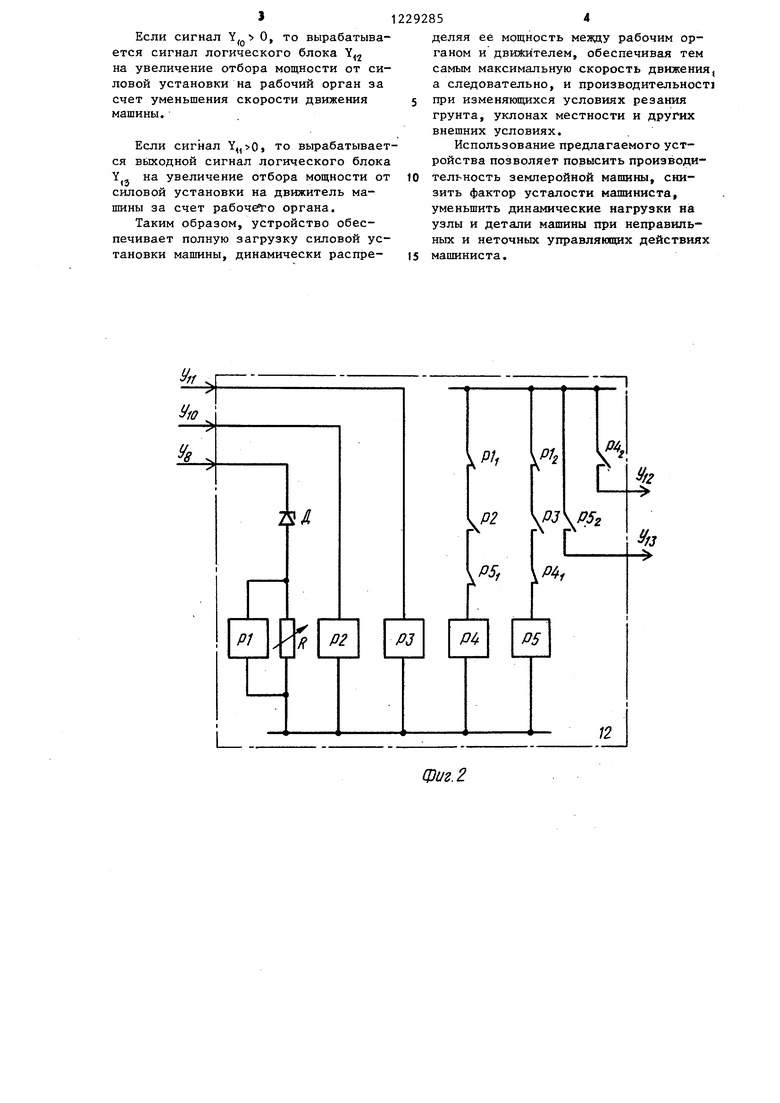
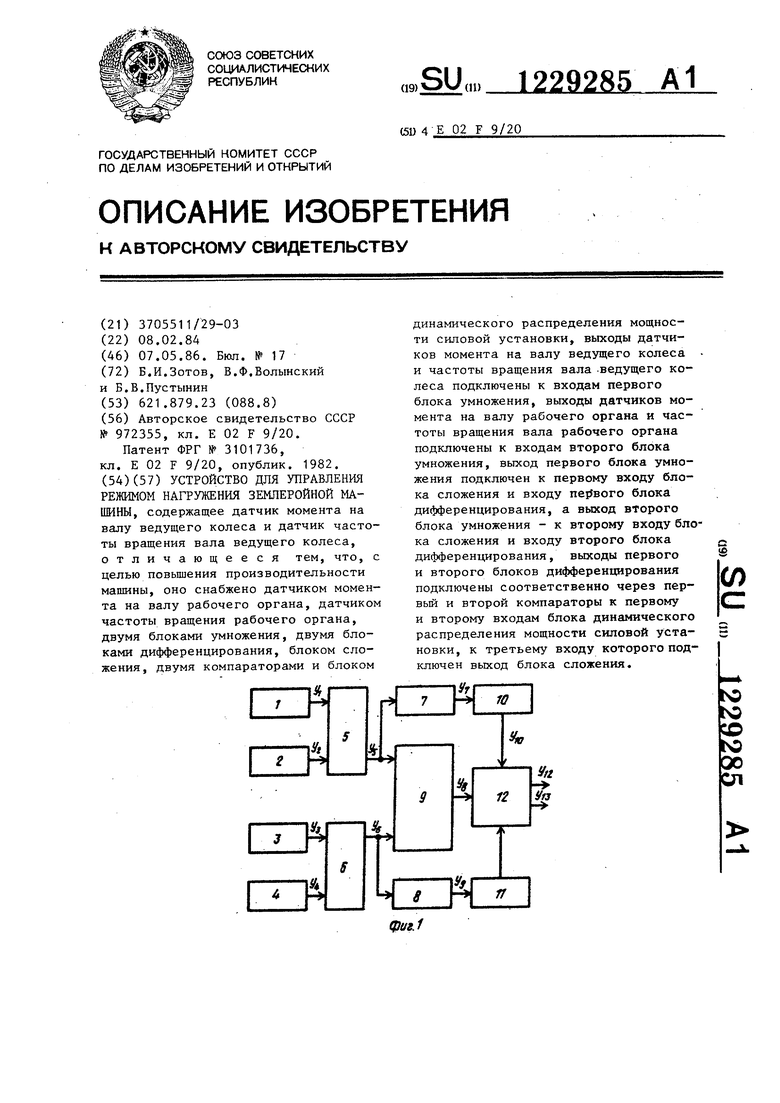
На фиго1 изображена функцион;зль- ная схема устройстваj на фиг„2 и 3 - примеры реализации блока динамического распределения мощности силовой установки.
Устройство для управления режимом нагружения зе теройной машины содержит датчик 1 момента на валу рабочег органа датчик 2 частоты вращения вала рабочего органа, датчик 3 момента на валу веду1цего колеса, датчик 4 частоты враш,ения ведущего колеса, блоки 5 и 6 умножения, блоки 7 и 8 дифференцирования, блок 9 сложения, компараторы 10 и 11 знаков изменения нагрузки, а также блок 12 динамическог распределения мощности силовой установки ,
На фиг о 2 обозначены настроечный резистор RJ, стабилитрон - D и реле . J на фиг.З - мультиплексор 12,1 преобразователь-усилитель 12,2, аналого-цифровой преобразователь 12,3, местньм блок 12,4 управления, устройство 12,5 ввода, микропроцессорная ЭВМ 12,6, устройство 12,7 вывода демульти.тшексор 12.8 и обратные преобразователи 12,9 и 12,10,
Устройство работает следующим образом.
Выходной сигнал датчика 1 пропорционален моменту на валу рабочего органа
Y, К,
М
р.о
Выходной сигнал датчика 2 пропорционален частоте вращения вала рабочего органа
Y, К
а
р.о
Выходной сигнал датчика 3 пропорционален моменту на валу ведущего колеса
Y, К,
М
е. к
Выходной сигнал датчика 4 пропорционален частоте вращения ведущего колеса
4 и. к
Выходной сигнал блока 5 умножения пропорционален мощности,.реализуемой на рабочем органе
,
Y,K,М,
К со„, К -N,
P.O. РД 5 Р О.
Выходной сигнал блока 6 умножения пропорционален мощности, реализуемой движителем машины
Y Y .Y К М G -5 4 9 в.х.
К4-«8..К,N
АЬ
Выходной сигнал блока 7 дифференцирования пропорционален производной от мощности, реализуемой на рабочем органе
Y, К
dNp.0 dt
Выходной сигнал блока В дифференцирования пропорционален производной от мощности, реализуемой движителем машины
Y - к . 9 9 dt
Выходной сигнал блока 9 сложения пропорционален сумме мощностей, реализуемых на рабочем органе и на дви- ;жителе
30
в.а
NA.,)
Y
(о
Выходной сигнал компаратора 10 соответствует знаку изменения мощности, реализуемой на рабочем органе
j +,если мощность увеличивается -, если мощность уменьшается О, если мощность не изменяется, Выходной сигнал компаратора 11 соответствует знаку изменения мощности, реализуемой на движителе машины
+, если мощность увеличивается Y -, если мощность уменьшается
О, если мощность не изменяется.
Выходные сигналы блока 12 Y,
1Z
и
YI отсутствуют, если сумма мощностей,, реализуемых движителем машины и рабочим органом, равна свободной МОЩНОСТИ силовой установки.
Если мощность силовой установки используется неполностью, т.е.
N - (N + ев Р-
NA.)O,
55 то выходные сигналы логического блока 12 вырабатываются в зависимости от выходных сигналов компараторов 10 и 11,
J
Если сигнал Y О, то вырабатывается сигнал логического блока Y на увеличение отбора мощности от силовой установки на рабочий орган за счет уменьшения скорости движения машины.
Если сигнал Y,, 0 то вырабатывается выходной сигнал логического блока Y на увеличение отбора мощности от силовой установки на движитель машины за счет рабоче го органа.
Таким образом, устройство обеспечивает полную загрузку силовой установки машины, динамически распре292854
деляя ее мощность меяду рабочим органом и движителем, обеспечивая тем самым максимальную скорость движения, а следовательно, и производительност
5 при изменяющихся условиях резания грунта, уклонах местности и других внешних условиях.
Использование предлагаемого устройства позволяет повысить производи10 тельность землеройной машины, снизить фактор усталости машиниста, уменьшить динамические нагрузки на узлы и детали машины при неправильных и неточных управляющих действиях
(5 машиниста.
фиг. 2
Редактор Г.Гербер
Составитель А.Ремизов Техред И.Верес
Заказ 2424/25 Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
фиг.З
Корректор А.Тяско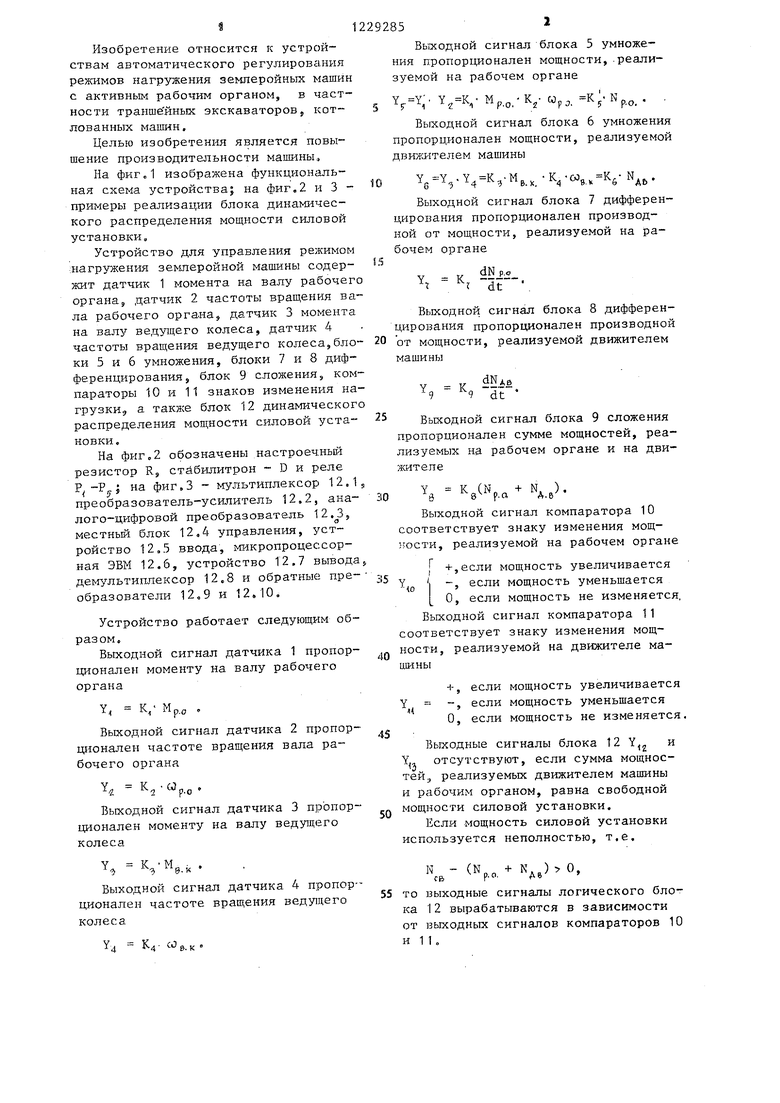
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор положения рабочего органа землеройной машины | 1981 |
|
SU972355A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1986 |
|
SU1377343A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU994651A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАБОЧИХ ПРОЦЕССОВ ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2011764C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Автоматический регулятор положения рабочего органа землеройной машины | 1981 |
|
SU972355A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ № 3101736, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
