(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU1007082A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Устройство для формирования сигнала обратной связи системы управления гидроагрегатом | 1977 |
|
SU947821A1 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Следящая система | 1977 |
|
SU661501A1 |
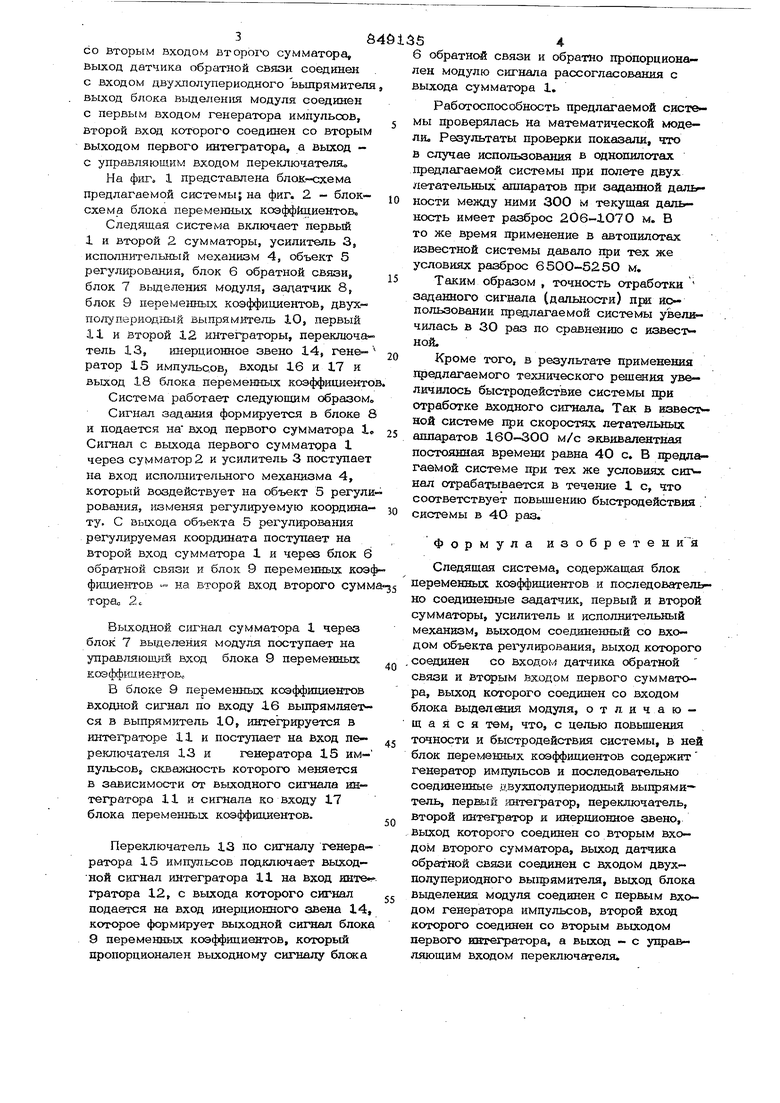
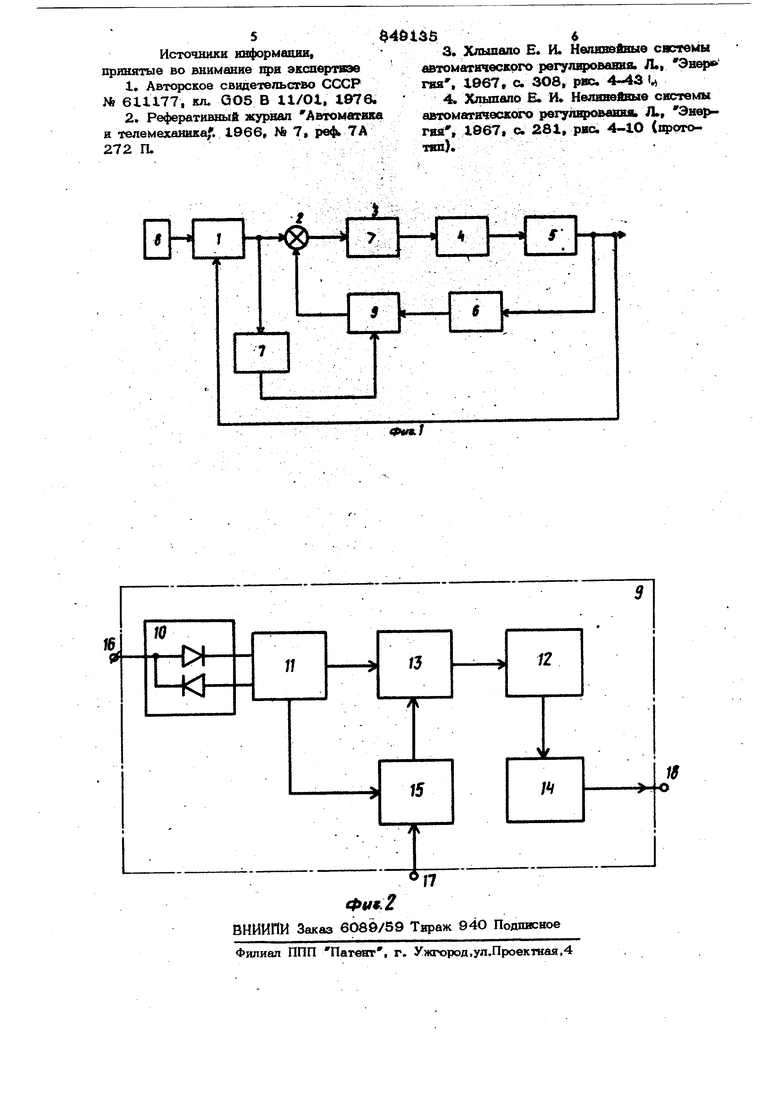
Изобретение относится к автоматическому регулированию и может быть исполь зовано в нелинейных следящих системах с переменным коэффициентом демпфирован Известны следящие системы, содержащие последовательно соединенные иамеритель рассогласования, сумматор, усилитель и исполнительный двигатель, выход которого соединен со входом объекта регулирования, выход которого соединен со входом измерения рассогласования и через последовательно соединенные блок обратной связи и блок переменных коэффициентов - со вторым входом сумматора, вход которого через вычислительное устройство соединен с управляющим входо блока переменных коэффициентов, причем характеристики вычислительного устройства и блока переменных коэффициентов выбираются в зависимости от требований к динамике следящих систем 1 } - 31 Известна также следящая система, содержащая блок переменных коэффициентов и последовательно соединенные аацвпс чик, первый и второй сумматоры, усили тель и исполнительный механизм, вь1ход которого соединен со входом объекта регулирования, выход которого соединен со входом датчика обратной связи к со Вторым входом первого сумматора, вььход которого соединен со входом блока выделения модуля 4. Недостатками известной системы являются ее низкая точность отработки Входного сигнала из-за изменения динамических характеристик в зависимости от изменения параметров объекта регулирования при малых значениях входного сигнала и ее невысокое быстродействие. Цель изобретения - повышение точности и быстродействия системы. Поставленная цель достигается тем, .что в системе блок переменных коэффициентов содержит генератор импульсов и последовательно соединенные двухполупе- риодный выпрямитель, первый интегратор, переключатель, второй интегратор и инерционное звено, выход которого соединен со вторым входом второго сумматора. Выход датчика обратной связи соединен с входом двухлолупериодного вьшрямителя выход блока выделения модуля соединен с первьш входом генератора импульсов, Второй вход которого соединен со вторым выходом первого интегратора, а выход с управляющим входом переключателя,. На фиг. 1 представлена блок-схема предлагаемой системы; на фиг. 2 - блок- схема блока переменных коэффициентов. Следящая система включает первый 1 и второй 2 сумматоры, усилитель 3, исполнительный механизм 4, объект 5 регулирования, блок б обратной связи, блок 7 вьщеления модуля, задатчик 8, блок 9 перемегшых коэффициентов, двухполупериодный выпрямитель 10, первый Ни второй 12 интеграторы, переключатель 13, инерционное звено 14, генератор 15 импульсов входы 16 и 17 и выход 18 блока переменных коэффициент Система работает следующим образом Сигнал задания формируется в блоке и подается на вход первого сумматора 1 Сигнал с выхода первого сумматора I через сумматор 2 и усилитель 3 поступает на вход исполнительного механизма 4, который воздействует на объект 5 регул рования, -13меняя регулируемую координа ту. С выхода объекта 5 регул1фования регулируемая координата поступает на второй вход сумматора 1 и черее блок 6 обратной связи и блок 9 переменных коэ фиииентов на второй вход второго сум торао 2с Вь;ходной сигнал сумматора 1 через блок 7 выделения модуля поступает на управляющий вход блока 9 переменных коэффилиег-ггов. В блоке 9 переменных коэффшщеыгов входной сигнал по входу 16 вьшрямляет- ся в выпрямитель 1О, интегрируется в интеграторе 11 и поступает на вход пе- реключателя 13 и генератора 15 импульсов, скважность которого меняется в зависимости от выходного сигнала интегратора 11 и сигнала ко входу 17 блока переменных коэффициентов. Переключатель 13 по сигналу генера ратора 15 импульсов подключает выходной сигнал интегратора 11 на вход инте гратора 12, с выхода которого сигнал подается на вход инерционного звена 14 которое формирует выходной сигнал блок 9 переменных коэффициентов, который пропорционален выходному сигналу блсжа 6 обратной связи и обратно пропорционален модулю сигнала рассогласования с выхода сумматора 1. Работоспособность предлагаемой системы проверялась на математической моде- лио Результаты проверки показали, что в случае использования в одношшотах предлагаемой системы при полете двух летательных аппаратов Щ)И заданной дальности между ними 300 м текущая дальность имеет разброс 206-1070 м. В то же время применение в автопилотах известной системы давало при тех же условиях разброс 6 500-52 5О м. Таким образом , точность отработки заданного сигнала (дальности) npi йопользовании предлагаемой системы увеличилась в ЗО раз по сравнению с известу ной. Кроме того, в результате применения 1федлагаемого технического решения увеличилось быстродействие системы при отработке входного сигнала. Так в известной системе при скоростях летательных ашшратов 160-ЗОО м/с эквивалентная постоянная времени равна 40 с. В 15)едла- гаемой системе при тех же условиях отрабатывается в течение 1 с, что соответствует повышению быстродействия системы в 4О раз. Формула изобретения Следящая система, содержащая блок переменных коэффициентов и последователь но соединенные задатчик, первый и второй сумматоры, усилитель и исполнительный механизм, выходом соединенный со входом объекта регулирования, выход которого соединен со входом датчика обратной связи и втфым входом первого сумматора, выход которого соединен со входом блока выдел шия модуля, отличающаяся тем, что, с целью повьшения точности и быстродействия системы, в ней блок переменных коэффициентов содержит генератор импульсов и последовательно соединенные двухполупериодный выпрямитель, первый интегратор, переключатель, второй интегратор и инерционное звено, выход которого соединен со вторым входом второго сумматора, выход датчика обратной связи соединен с входом двуххюлупериодного выщ)ямителя, выход блока вьзделения модуля соединен с входом генератора импульсов, второй вход которого соединен со вторым выходом первого интегратора, а выход - с ynpaJ&Л5ЦОЩИМ Входом переключателе
Источники шфэрма&ии, принятые во внимание Щ)в экспертвэе
1967 с. 281, рнс. 4-10 (itppTOгия, тяп).
ТФ
