Изобретение относится к гироскопической технике, а более конкретно к механическим гироскопическим датчикам угла, используемым в качестве чувствительных элементов гироскопических стабилизаторов.
Известны механические гироскопические датчики угла - двухстепенной интегрирующий гироскоп, трехстепенной астатический гироскоп, динамически настраиваемые гироскопические датчики угла, - в которых информацию об угле поворота основания несет угол поворота ротора относительно корпуса прибора (см. Д.С.Пельпор. Гироскопические системы. Теория гироскопов и гиростабилизаторов. - М.: Высшая школа, 1986. Одинцов А.А., Теория и расчет гироскопических приборов. - К.: Вища шк., 1985). При повороте основания, на котором установлен такой гироскопический датчик угла, его ротор также поворачивается на угол, пропорциональный углу поворота основания (угол прецессии). Если считать входным сигналом угловую скорость основания, а выходным сигналом угол прецессии, то такой датчик можно описать интегрирующим звеном.
Недостатком такого гироскопического датчика угла является то, что он имеет ограниченные углы прецессии, и при значительных колебаниях основания, на котором он установлен, ротор ложится на упоры и датчик перестает выполнять свои функции. Т.е. интегрирующее звено имеет зону ограничения.
Известны приборы, в которых указанный недостаток устранен, содержащие механический гироскопический датчик угла, выход которого через зону ограничения углов прецессии соединен со входом усилителя, подключенного к входу электронного интегратора и датчика момента, выход которого является входом гироскопического датчика угла, а сигнал об угле поворота основания снимается с выхода электронного интегратора (см. Д.С.Пельпор. Гироскопические системы. Теория гироскопов и гиростабилизаторов. - М.: Высшая школа, 1986, Одинцов А.А. Теория и расчет гироскопических приборов. - К.: Вища шк., 1985).
За счет введения жесткой отрицательной обратной связи углы прецессии механического датчика ограничиваются.
Недостатком такого датчика угла является то, что наличие отрицательной обратной связи уменьшает чувствительность прибора, а дрейф интегрирующего устройства приводит к дополнительным погрешностям.
Задачей изобретения является сохранение работоспособности гироскопических датчиков угла при экстремальных поворотах основания без существенного ухудшения их точности при функционировании в номинальном режиме.
Задача решается тем, что в устройство, содержащее гироскопический датчик угла, выход которого соединен с зоной ограничения углов прецессии, усилитель, электронный интегратор и датчик момента, дополнительно вводится звено "зона нечувствительности", ширина которой меньше ширины линейного участка зоны ограничения углов прецессии, и сумматор, причем выход зоны ограничения углов прецессии связан с входом сумматора и входом звена "зона нечувствительности", а выход звена "зона нечувствительности" связан с входом усилителя и вычитающим входом сумматора, выход усилителя связан с входом датчика момента, замыкающим отрицательную обратную связь при превышении входным сигналом гироскопического датчика угла порога нечувствительности звена "зона нечувствительности", выход усилителя связан также с входом электронного интегратора, выход которого соединен с входом сумматора; рабочий выходной сигнал снимается с выхода сумматора.
На чертеже изображена принципиальная схема устройства, состоящего из гироскопического датчика угла 1, выход которого соединен со входом зоны ограничения углов прецессии 2, выход которой связан с входом сумматора 7 и входом звена "зона нечувствительности" 6, выход которого связан с сумматором 7 и посредством усилителя 3 с электронным интегратором 5, выход которого связан с вычитающим входом сумматора 7, причем выход усилителя 3 связан с входом датчика момента 4, выход которого соединен с входом гироскопического датчика угла 1, а выход электронного интегратора 5 связан с входом сумматора 7.
Устройство работает следующим образом. Пока входной сигнал гироскопического датчика угла 1, изменяющийся под действием угловой скорости основания ω, не превышает порога нечувствительности звена "зона нечувствительности" 6, обратная связь разомкнута, сигнал на выходе звена "зона нечувствительности" 6, усилителя 3 и датчика момента 4 отсутствует и гироскопический датчик угла 1 работает в обычном режиме, интегрируя входной сигнал (угловую скорость движения основания) при этом сигнал с его выхода поступает через сумматор 7 на выход. Если входной сигнал гироскопического датчика угла 1 превышает порог нечувствительности звена "зона нечувствительности" 6, то через усилитель 3 и датчик момента 4 замыкается отрицательная обратная связь и гироскопический датчик угла начинает работать в режиме датчика угловой скорости, что ограничивает углы прецессии, не позволяя им достичь границы зоны ограничения углов прецессии 2. При этом сигнал с выхода усилителя 3, пропорциональный угловой скорости движения основания, поступает на электронный интегратор 5, с выхода которого на сумматор 7 поступает сигнал, пропорциональный углу поворота. Сигнал с выхода звена "зона нечувствительности" 6, пропорциональный угловой скорости, поступает на вход сумматора 7, где компенсирует такой же сигнал, поступающий туда с выхода гироскопического датчика угла 1, и на выходе сумматора 7 по прежнему получается сигнал, пропорциональный углу поворота основания.
Данное устройство позволяет сохранить высокие метрологические характеристики датчика угла при работе в номинальном режиме и обеспечить получение полезного выходного сигнала при экстремальных поворотах основания, предотвращая выход из рабочего режима.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| Измеритель вертикальной скорости качки | 1972 |
|
SU444112A1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ В ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ И ДАТЧИК УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ | 2004 |
|
RU2272297C1 |
| Вектор-магнитометр | 1979 |
|
SU840772A2 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
Изобретение относится к гироскопической технике, а более конкретно к механическим гироскопическим датчикам угла, используемым в качестве чувствительных элементов гироскопических стабилизаторов. Чувствительный элемент содержит гироскопический датчик угла, выход которого соединен с зоной ограничения углов прецессии, усилитель, электронный интегратор, датчик момента, а также звено «зона нечувствительности», ширина которой меньше ширины линейного участка зоны ограничения углов прецессии, и сумматор, причем выход зоны ограничения углов прецессии связан с входом сумматора и входом звена «зона нечувствительности», а выход звена «зона нечувствительности» связан с входом усилителя и вычитающим входом сумматора, выход усилителя связан с входом датчика момента, замыкающим отрицательную обратную связь при превышении входным сигналом гироскопического датчика угла порога нечувствительности звена «зона нечувствительности», выход усилителя связан также с входом электронного интегратора, выход которого соединен с входом сумматора; рабочий выходной сигнал снимается с выхода сумматора. Техническим результатом является сохранение работоспособности гироскопических датчиков углов при экстремальных поворотах основания без существенного ухудшения их точности при функционировании в номинальном режиме. 1 ил.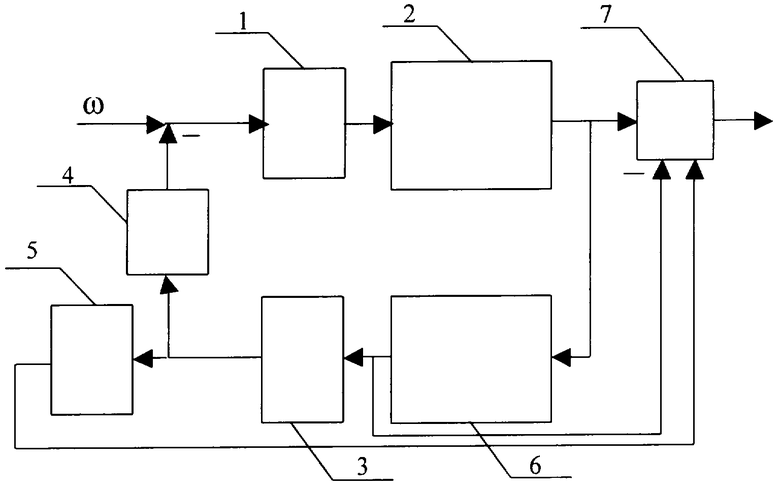
Чувствительный элемент гироскопического стабилизатора, содержащий гироскопический датчик угла, выход которого соединен с зоной ограничения углов прецессии, усилитель, электронный интегратор и датчик момента, отличающийся тем, что в него дополнительно введено нелинейное звено «зона нечувствительности», ширина которой меньше ширины линейного участка зоны ограничения углов прецессии, и сумматор, причем выход зоны ограничения углов прецессии связан с входом сумматора и входом звена «зона нечувствительности», а выход звена «зона нечувствительности» связан с входом усилителя и вычитающим входом сумматора, выход усилителя связан с входом датчика момента, замыкающим отрицательную обратную связь при превышении входным сигналом гироскопического датчика угла порога нечувствительности звена «зона нечувствительности», выход усилителя связан также с входом электронного интегратора, выход которого соединен с входом сумматора, с выхода которого снимается рабочий выходной сигнал.
| ПЕЛЬПОР Д.С | |||
| Гироскопические системы | |||
| Теория гироскопов и гиростабилизаторов | |||
| - М.: Высшая школа, 1986, с.86-88 | |||
| ОДИНЦОВ А.А | |||
| Теория и расчет гироскопических приборов | |||
| - Киев: Вища школа, 1985, с.313-315 | |||
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU292139A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО | 0 |
|
SU332323A1 |
| Привод | 1977 |
|
SU679933A1 |
| RU 2002102033 A1, 10.10.2003 | |||
| US 3931747 A, 13.01.1976. | |||

