Изобретение относится к промышленным роботам, а именно к манипуляторам с поворотными руками и механическими схватами для работы с тонкостенными корпусными деталями.
Целью изобретения является расширение технологических возможностей за счет обеспечения работы с заготовками типа тонкостенных коробок, оснащенных плинтусными отбортовками на загрузочных зевах.
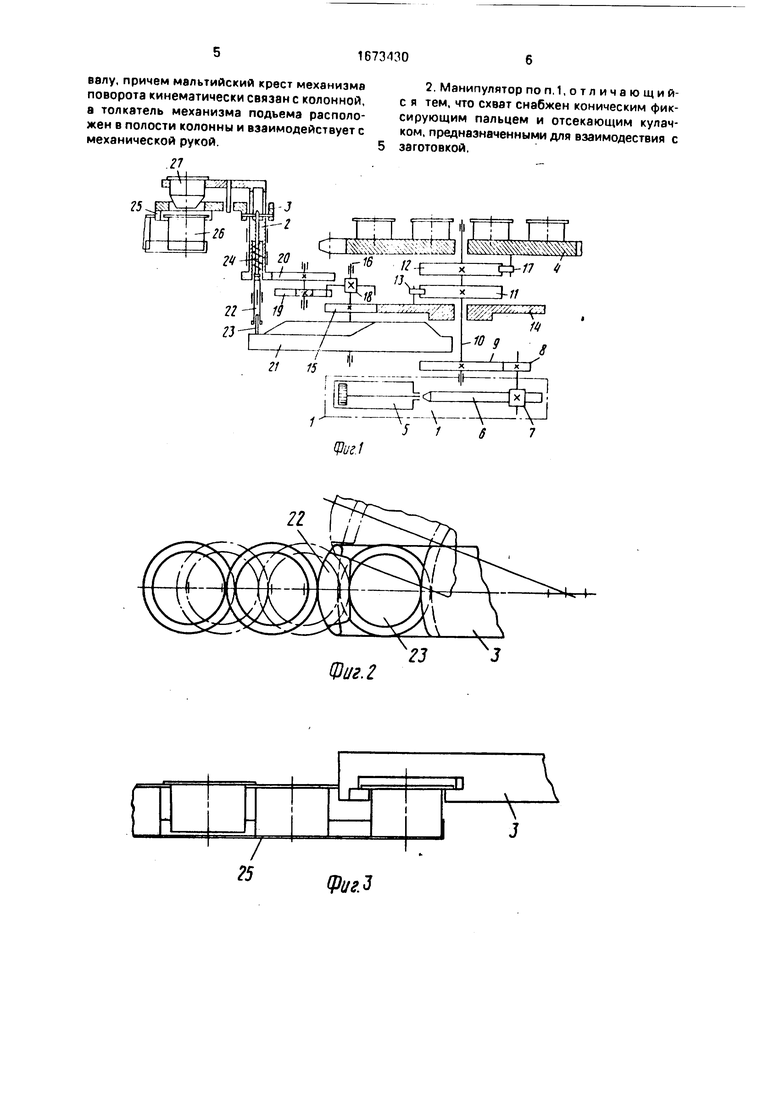
На фиг. 1 изображена кинематическая схема манипулятора; на фиг. 2 - схват, вид снизу; на фиг. 3 - схват, вид сбоку.
Манипулятор состоит из основания 1, колонны 2, механической руки 3 со схватом, транспортного устройства 4 в виде ротора и привода перемещения механической руки и транспортного устройства 4. Привод перемещения механической руки и транспортного устройства 4 состоит из механизмов поворота и подъема механической руки, храпового механизма и силового цилиндра 5, например пневмоцилиндра, шток которого посредством рейки 6 и зубчатого колеса 7 зубчато-реечной передачи и зубчатых колес 8 и 9 цилиндрической передачи связан с основным распределительным валом 10, на котором располагаются храповые колеса 11
VJ
СО 4
А
О
и 12 храпового механизме, при этом собачка 13 связывает храповое колесо 11 посредством зубчатых колес 14 и 15 с дополнительным распределительным валом 16. а собачка 17 храпового колеса 12 связывает основной распределительный вал 10 с транспортным устройством 4.
Механизм поворота механическая руки выполнен в виде мальтийского механизма, водило 18 (ведущий диск) которого закреп- лено на дополнительном распределительном валу 16, а мальтийский крест 19 связан с колонной 2 посредством цилиндрической передачи, ведущее зубчатое колесо 20 которой установлено на одном валу с мальтий- ским крестом, а ведомое зубчатое колесо жестко связано с колонной 2.
Механизм подъема механической руки выполнен в виде кулачкового механизма, кулачок 21 которого выполнен торцовым и установлен на дополнительном распределительном валу 16, а толкатель 22 снабжен роликом 23 и взаимодействует с подпружиненным поводком 24, расположенным в полости колонны 2. Другой конец поводка своим поперечным пальцем через вертикальный паз в колонне 2 подпирает механическую руку 3, оснащенную на внешнем конце схватом в виде сквозного клинового радиусного паза типа ласточкина хвоста. Механическая рука 3 оснащена клиновым отсекающим кулачком 25, размещенным на уровне возможного нахлестывания плинтусных отбортовок коробок 26. Консоль колонны 2 оснащена коническим фиксирующим пальцем 27.
Манипулятор работает следующим образом.
При прямом ходе пневмоцилиндра через зубчатую рейку 6 и зубчатое колесо 7 зубчато-реечной передачи вращается основной распределительный вал 10, который через храповое колесо 11, собачку 13 и зубчатые колеса 14 и 15 приводит во вращение дополнительный распределительный вал 16. Вращение дополнительного распределительного вала через мальтийский механизм и зубчатую передачу проворачивает колонну 2 механической руки 3. Механическая рука при повороте своим сквозным клиновым радиусным пазом типа ласточкина хвоста захватывает плинтусную отбор- товку коробки 26, одновременно отсекая кулачком 25 остальной ряд коробок 26, имеющих возможность нахлестывания плинтус- ными отбортовками. Мальтийский механизм обеспечивает остановку механической руки над коробкой 26.
В момент останова механическая рука 3 под действием подпружинегого поводка 24,
опертого через толкатель 22 на профиль торцового кулачка 21, поднимается и коническим пальцем 27 центрирует и фиксирует положение коробки 26 в схвате, после чего по программе мальтийского механизма механическая рука поворачивается на позицию укладки коробок 26 на транспортное устройство 4 в виде ротора. На позиции укладки мальтийский механизм обеспечивает второй останов механической руки, которая под действием подпружиненного поводка 24 в соответствии с профилем торцового кулачка 21 опускает коробку 26 в ячейку ротора транспортного устройства 4, освобождая ее от конического фиксирующего пальца 27.
При последующем повороте по программе мальтийского механизма механическая рука 3 освобождается от коробки 26. На этом заканчивается прямой ход силового цилиндра 5 привода перемещения механической руки.
При обратном ходе силового цилиндра 5 вращение основного распределительного вала 10 через храповое колесо 12 и собачку 17 поворачивает ротор транспортного устройства 4, подставляя свободную ячейку на позицию укладки коробок.
Формула изобретения
1. Манипулятор, содержащий основание, полую колонну, механическую руку со схватом, установленную на колонне, и привод перемещения механической руки, включающий механизмы поворота и подьема, последний из которых является кулачковым механизмом, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения работы с заготовками типа тонкостенных коробок, оснащенных плинтусными отбортовками, он снабжен транспортным устройством, размещенным на основании, а привод перемещения механической руки - силовым цилиндром, основным и дополнительным распределительными валами и храповым механизмом, храповые колеса которого установлены на основном распределительном валу, кинематически связанном со штоком силового цилиндра, а собачки храпового механизма установлены соответственно на транспортном устройстве и на ведущем зубчатом колесе дополнительно введенной цилиндрической передачи, при этом указанное зубчатое колесо размещено на основном распределительном валу, а механизм поворота является мальтийским механизмом, водило которого, а также кулачок механизма поворота и ведомое зубчатое колесо цилиндрической передачи установлены на дополнительном распределительному
валу, причем мальтийский крест механизма поворота кинематически связан с колонной, а толкатель механизма подъема расположен в полости колонны и взаимодействует с механической рукой.
2. Манипулятор по п.1, о т л и ч а ю щ и й- с я тем, что схват снабжен коническим фиксирующим пальцем и отсекающим кулачком, предназначенными для взаимодествия с заготовкой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для автоматической заправки перфоратора с устройством прерывистого протягивания перфорируемого материала | 1990 |
|
SU1728842A1 |
| Манипулятор | 1984 |
|
SU1242344A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Мальтийский механизм | 1982 |
|
SU1084521A1 |
| Делительное устройство | 1984 |
|
SU1238945A1 |
| Устройство для правки лезвий безопасных бритв | 1990 |
|
SU1712131A1 |
| АВТО/\^АТИЧЕСКАЯ ЛИНИЯ УПАКОВКИ ИЗДЕЛИЙ | 1973 |
|
SU408741A1 |
| БАХРОМО-ВЯЗАЛЬНАЯ МАШИНА | 1936 |
|
SU55198A1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
Изобретение относится к промышленным роботам, а именно к манипуляторам для работы с тонкостенными корпусными деталями. Целью изобретения является расширение технологических возможностей за счет обеспечения работы с заготовками типа тонкостенных коробок, оснащенных плинтусными отбортовками на загрузочных зевах. Манипулятор состоит из основания 1, колонны 2, механической руки 3 со схватом, транспортного устройства 4 и привода перемещений механической руки и транспортного устройства. Причем привод перемещений выполнен в виде силового цилиндра 5, шток которого кинематически связан с основным распределительным валом 10, несущим два храповых колеса 11 и 12 храпового механизма, одно из которых передает движение при прямом ходе поршня силового цилиндра 5 на дополнительный распределительный вал 16 и затем - механизмам поворота и подъема механической руки, а другое храповое колесо 12 установлено с возможностью передачи движения транспортному устройству 4 при обратном движении поршня силового цилиндра. Механизм поворота механической руки является мальтийским механизмом, а механизм подъема - кулачковым механизмом, при этом водило 18 механизма поворота и кулачок 21 механизма подъема установлены на дополнительном распределительном валу 16. Схват снабжен фиксирующим коническим пальцем 27 и отсекающим кулачком 25. 1 з.п. ф-лы, 3 ил.
Фиг. 2
AAd%
a
5
| Манипулятор | 1986 |
|
SU1342719A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
