Изобретение относится к специализированным транспортным средствам, в частности к транспортным средствам для перевозки и 6oKOBoii разгрузки контейнеров с мусором.
Цель изобретения - расширение технологических возможностей и удобства обслуживания.
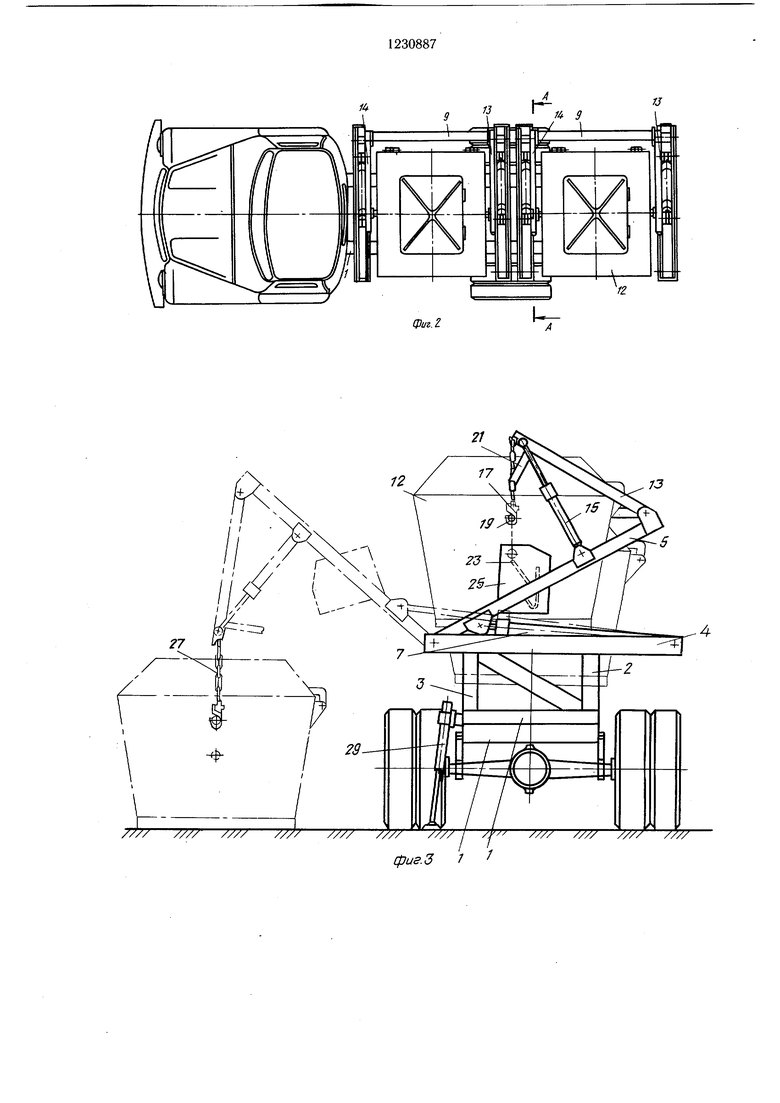
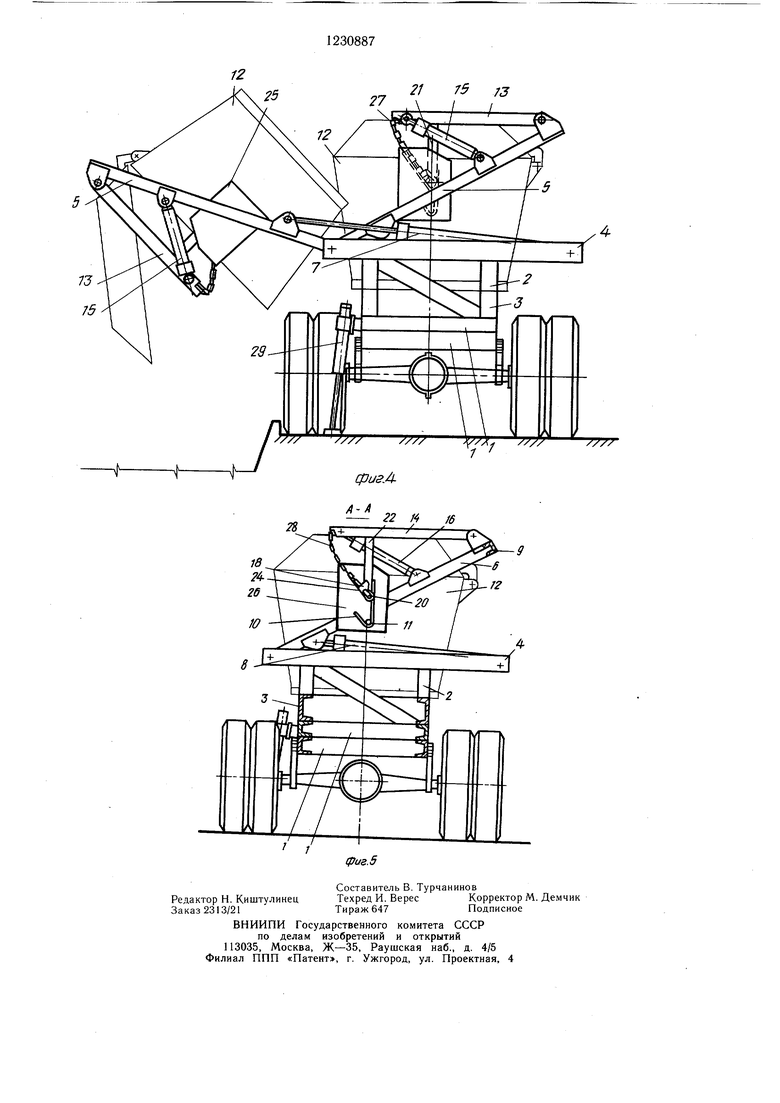
На фиг. 1 изображен контейнеровоз, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сзади при подъеме или опускании контейнера; на фиг. 4 - то же, вид сзади при опрокидывании контейнера; на фиг. 5 - разрез А-А на фиг. 2.
Контейнеровоз содержит шасси 1 транспортного средства, на котором на стойках
10
висает вертикально. Водитель включает гидроцилиндры 7 и 8 и поворачивает рычаги 5 и 6 с брусом 9 и с рычагами 13 и 14. Контейнер 12 опускается на площадку. После опускания контейнера 12 на контейнерную площадку водитель увеличивает угол наклона, при этом грузозахватные органы 17 и 18 выводятся из зацепления с цапфами 19 и 20 контейнера 12. При некотором повороте влево (фиг. 3) грузозахватные органы 17 и 18 поднимаются над контейнером на своих рычагах.
Транспортное средство переезжает к груженому контейнеру. Водитель, не выходя из кабины, выдвигает опоры 29 и 30 и опускает грузозахватные органы 17 и 18 до
2 и балках 3 установлена рама 4, снабжен- 5 уровня верхних цапф 19 и 20 груженого конная первыми рычагами 5 и 6 с приводом от гидроцилиндров 7 и 8. Первые приводные рычаги 5 и 6 соединены между собой продольным брусом 9, шарнирно закреплены на раме 4 с возможностью поворота в вер- Q тикальной плоскости и снабжены в средней части основными ловителями 10 для цапф 11 контейнера 12. Вторые поворотные в вертикальной плоскости рычаги 13 и 14с приводом от гидроцилиндров 15 и 16 шарнирно установлены на концах рычагов 5 и 6 и снабже- 25 ны грузозахватными органами 17 и 18 для других цапф 19 и 20, а также упорами 21 и 22. Дополнительные ловители 23 и 24 выполнены над основными ловителями 10 на пластинах 25 и 26, а грузозахватные органы 17 и 18 соединены с концами вторых поворотных 30 рычагов 13 и 14 гибкими элементами 27 и 28. Шасси 1 контейнеровоза имеет также две выдвижные гидравлические опоры 29 и 30 для исключения перегрузки колес при погрузке и разгрузке контейнеров 12.
35
тейнера 12, затем выходит из кабины и одевает захваты грузозахватных органов на верхние цапфы 19 и 20 груженого контейнера 12. Водитель из кабины включает гидроцилиндры 7 и 8 и поднимает груженый контейнер до предельного (транспортного) положения, затем гидроцилиндрами 15 и 16 опускает рычаги 13 и 14 до предельного (транспортного) положения.
Контейнер устанавливается на балки 3 шасси 1. При опускании контейнера его цапфы 11, 19 и 20 входят в ловители 10, 23 и 24, а упоры 21 и 22 запирают цапфы 19 и 20 контейнера в дополнительных ловителях 23 и 24, что обеспечивает надежную фиксацию контейнера в транспортном положении.
Аналогично осуществляется обмен других контейнеров 12.
В контейнеровозе предусмотрен режим самосвальной разгрузки контейнеров 12.
Режим самосвальной разгрузки контейнеров заключается в том, что груженые контейнеры транспортируются к месту разгрузки, затем водитель, не выходя из кабины, выдвигает опоры 29 и 30, включает гидроцилиндры 7 и 8 и наклоняет рычаги 5 и 6 с
Контейнеровоз работает следующим образом.
Режим самосвальной разгрузки контейнеров заключается в том, что груженые контейнеры транспортируются к месту разгрузки, затем водитель, не выходя из кабины, выдвигает опоры 29 и 30, включает гидроцилиндры 7 и 8 и наклоняет рычаги 5 и 6 с
В транспортном положении на шасси 1 устанавливаются два порожних контейнера
12, гидроцилиндры 7 и 8 находятся в преде- Q брусом 9 и контейнером 12 до своего предель- льно сжатом положении, поворотные рычаги ного положения (фиг. 4) при этом контейнер 13 и 14 в опущенном положении, цапфы 11 12 опрокидывается, открывается крышка и расположены в основных ловителях 10, а цапфы 19 и 20 зафиксированы в своих дополнительных ловителях 23 и 24 торцами
упоров 21 и 22. При этом гибкие элементы 45 но разгружается и другой контейнер. После 27 и 28 несколько ослаблены, т.е. имеют не- разгрузки контейнеров рычаги 5 и 6, контей- который запас длины. При использовании контейнеровоза в качестве собирающего мусоровоза его транспортируют к контейнерной площадке, при этом водитель, не выходя из кабины, поднимает, например, зад- 50 НИИ брус 9, поворачивая рычаги 13 и 14 гидбытовые отходы под действием собственного веса разгружаются в отведенное место для разгрузки бытовых отходов. Аналогичроцилиндрами 15 и 16 до верхнего предельного положения. Цапфы 11, 19 и 20 выходят из ловителей 10, 23 и 24, контейнер 12 понеры 12 и опоры 29 и 30 устанавливаются в транспортное положение.
Использование изобретения позволяет обеспечить увеличение производительности и расширить технологические возможности контейнеровоза. Кроме того, оно позволяет производить погрузочно-разгрузочные работы при вывозе мусора в стесненных условиях узких внутренних дворов и проездов.
0
висает вертикально. Водитель включает гидроцилиндры 7 и 8 и поворачивает рычаги 5 и 6 с брусом 9 и с рычагами 13 и 14. Контейнер 12 опускается на площадку. После опускания контейнера 12 на контейнерную площадку водитель увеличивает угол наклона, при этом грузозахватные органы 17 и 18 выводятся из зацепления с цапфами 19 и 20 контейнера 12. При некотором повороте влево (фиг. 3) грузозахватные органы 17 и 18 поднимаются над контейнером на своих рычагах.
Транспортное средство переезжает к груженому контейнеру. Водитель, не выходя из кабины, выдвигает опоры 29 и 30 и опускает грузозахватные органы 17 и 18 до
5 уровня верхних цапф 19 и 20 груженого кон5 уровня верхних цапф 19 и 20 груженого конQ5 0
5
тейнера 12, затем выходит из кабины и одевает захваты грузозахватных органов на верхние цапфы 19 и 20 груженого контейнера 12. Водитель из кабины включает гидроцилиндры 7 и 8 и поднимает груженый контейнер до предельного (транспортного) положения, затем гидроцилиндрами 15 и 16 опускает рычаги 13 и 14 до предельного (транспортного) положения.
Контейнер устанавливается на балки 3 шасси 1. При опускании контейнера его цапфы 11, 19 и 20 входят в ловители 10, 23 и 24, а упоры 21 и 22 запирают цапфы 19 и 20 контейнера в дополнительных ловителях 23 и 24, что обеспечивает надежную фиксацию контейнера в транспортном положении.
Аналогично осуществляется обмен других контейнеров 12.
В контейнеровозе предусмотрен режим самосвальной разгрузки контейнеров 12.
Режим самосвальной разгрузки контейнеров заключается в том, что груженые контейнеры транспортируются к месту разгрузки, затем водитель, не выходя из кабины, выдвигает опоры 29 и 30, включает гидроцилиндры 7 и 8 и наклоняет рычаги 5 и 6 с
Q брусом 9 и контейнером 12 до своего предель- ного положения (фиг. 4) при этом контейнер 12 опрокидывается, открывается крышка и
брусом 9 и контейнером 12 до своего предель- ного положения (фиг. 4) при этом контейнер 12 опрокидывается, открывается крышка и
но разгружается и другой контейнер. После разгрузки контейнеров рычаги 5 и 6, контей-
бытовые отходы под действием собственного веса разгружаются в отведенное место для разгрузки бытовых отходов. Аналогично разгружается и другой контейнер. После разгрузки контейнеров рычаги 5 и 6, контей-
неры 12 и опоры 29 и 30 устанавливаются в транспортное положение.
Использование изобретения позволяет обеспечить увеличение производительности и расширить технологические возможности контейнеровоза. Кроме того, оно позволяет производить погрузочно-разгрузочные работы при вывозе мусора в стесненных условиях узких внутренних дворов и проездов.
/J
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1985 |
|
SU1265099A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Контейнеровоз | 1988 |
|
SU1572856A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| УСТАНОВКА САМОСВАЛЬНАЯ ДЛЯ ПЕРЕВОЗКИ ГРАНУЛИРОВАННОГО МАТЕРИАЛА (ВАРИАНТЫ) | 2018 |
|
RU2685488C1 |
| Транспортное средство | 1985 |
|
SU1243982A1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 1991 |
|
RU2028220C1 |
| Передвижной перегрузчик | 1984 |
|
SU1303526A1 |
| Крановый захват-кантователь | 1984 |
|
SU1240722A1 |
| Опрокидыватель самосвальных транспортных средств | 1984 |
|
SU1201208A1 |

73
/J
////
фигЛ
A-A
фиг.5
22 /# /6
Составитель В. Турчанинов
Редактор Н. КиштулинецТехред И. ВересКорректор М. Демчик
Заказ 2313/21Тираж 647Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4
| 1999 |
|
RU2154468C1 | |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
