11
Изобретение относится к машиностроению, в частности к следящим пневмоприводам, и может быть использован для осуществления движения рабочего органа как в позиционном, так ив контурном режиме.
Цель изобретения - повьпиение точности позиционирования и быстродействия.
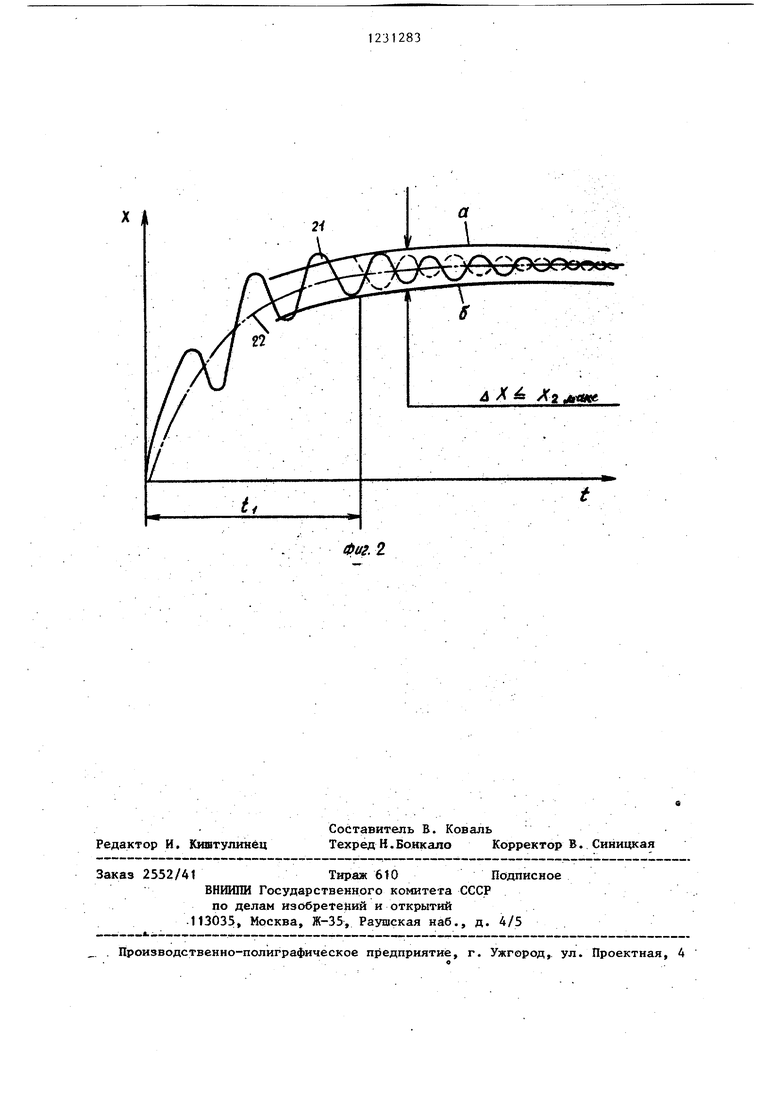
На фиг. 1 представлена принципи- альная схема пневмопривода; на фиг. 2 - график переходного процесса, поясняющий процесс позиционирования .
Двухотсчетный позиционный пневмо- привод (фиг. 1) содержит основной пневмодвигатель 1 грубого перемещения с установленным в нем поршнем 2 со штоком 3 с образованием рабочих
г. мл к с
полостей 4 и 5, дополнительный цифро- 20 модвигателя 6 точного перемещения.
вой пневмодвигатель 6 точного перемещения, включающий поршни 7-9, рабочие полости 10 - 12 и возвратную полость 13.
Пневмодвигатель 6 жестко связан со щтоком 3, а его поршень 9 .- с выходным звеном 14-пневмопривода.Кроме jToro, пневмопривод содержит систему управления, включающую.блок 15 управления,, подключенный к рабочим по- лостям 4 и 5 пневмодвигателя 1 и к , тормозному устройству 16, установленному с возможностью взаимодействия со штоком 3, блок 17 управления, подключенный к рабочим полостям 10-12 пневмодвигателя 6, датчик 18 обратной связи, жестко связанный с вькодным звеном 14, сравниванмцее устройство 19, на которое подается сигнал Xj задания и сигнал X от датчика 18 обрат- ной связи, и пороговое устройство 20, установленное между сравнивающим устройством 19 и блоком 17 управления дополнительного цифрового пневмодвигателя 6.
На фиг. 2 в координатах х, t (перемещение выходного звена 14 и время) схематически показана траектория 21 движения штока 3 и примерная траектория 22 выходного звена 14 с Компенсацией динамической ошибки основного пневмодвигателя 1 в пределах зоны лХ, ограниченной линиями а и б .
Пневмопривод работает следукмцим образом.
В возвратную полость 13 подается рабочая .среда и поршни 7-9 занима
ют крайнее левое по. чертежу положение На сравнивающее устройство 19 подается сигнал Xj задания, выходной сигнал ДХ с которого поступает на блок 15 управления и пороговое устройство 20. Блок 15 управления обеспечивает распределение рабочей среды между рабочими полостями 4 и 5 пневмодвигателя 1. Под действием перепада давления в рабочих полостях 4 и 5 перемещается поршень 2 и вместе с ним шток 3, дополнительный цифровой пневмодвигатель 6 и выходное звено 14. При этом сигнал X с датчика 18 обратной связи поступает на сравнивающее устройство 19 и в момент уменьшения рассогласования до некоторой величины &Х, не превосходящего максимального хода
г. мл к с
дополнительного цифрового пнев
срабатывает пороговое устройство 20, пропуская сигнал 4X на блок 17 управления дополнительного цифрового пневмодвигателя 6, который распределяет рабочую среду между рабочими полостями 1C-t2 в зависимости от величины сигнала .лХ,что приводит к перемещению поршней 7-9, и следовательно, к дополнительному перемещению выходного звена 14.
Тормозное устройство 16.оказывает в некоторые моменты времени силовое воздействие на шток 3, что позволяет увеличить жесткость механической характеристики и снизить чувствительность к изменяющимся параметрам, давлению рабочей среды, изменению внеш- 1|ей нafpyзки и т.д. Кроме того, тор- мозное устройство 16 позволяет фиксировать выходное звено 14 после отработки заданной координаты.
Таким образом, дополнительный цифровой пневмодвигатель 6, установленный между штоком 3 основного пневмодвигателя 1 и выходнь м звеном 14, при конкретном выполнении системы управления позволяет компенсировать динамическую ошибку основного пневмодвигателя 1 в Процессе их одновременной работы, что позволяет повысить быстродействие привода при заданной точ- . ности путем приближения точки управления (дополнительный цифровой пневмодвигатель 6) к точке наблюдения (выходное звено 14), с которой непосредственно связан датчик 18 обратной связи.
3QpOOQatx
л л /Уд
л. 2
Редактор И. Киштулинёц
Составитель В. Коваль
Техред Н. БонкалоКорректор В. Синицкая
Заказ 2552/41Тираж 6ШПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий .113035, Москва, Ж-35, Разшюкая наб,, д. 4/5
IT ШТ - -LJI Ц- ИД ПЬ 1Ж1-
, . Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления позиционным пневмоприводом и позиционный пневмопривод для его осуществления | 1988 |
|
SU1596143A1 |
| ПРЕЦИЗИОННЫЙ ЦИФРОВОЙ СЕРВОПРИВОД | 2016 |
|
RU2640879C2 |
| Позиционный пневмопривод | 1987 |
|
SU1481501A1 |
| Способ управления следящим позиционным пневмоприводом | 1988 |
|
SU1562543A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| Позиционный пневмопривод | 1982 |
|
SU1078147A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |

| Промышленный робот с дискретным позиционированием | 1978 |
|
SU768631A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
