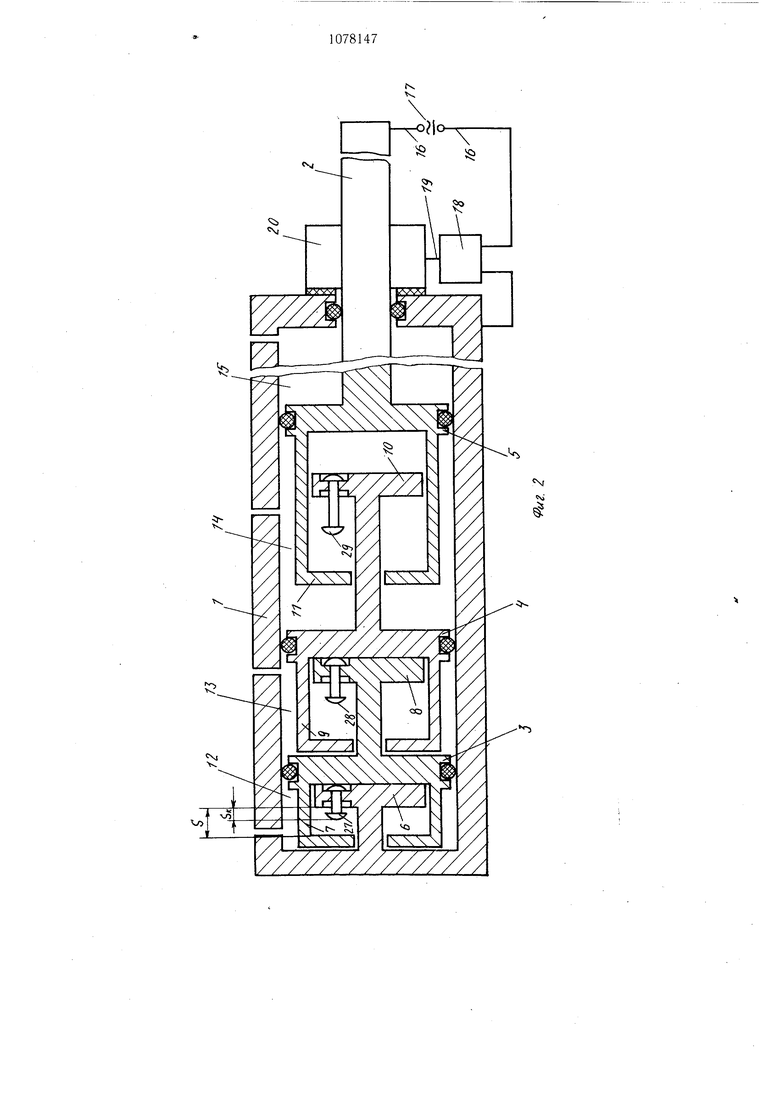
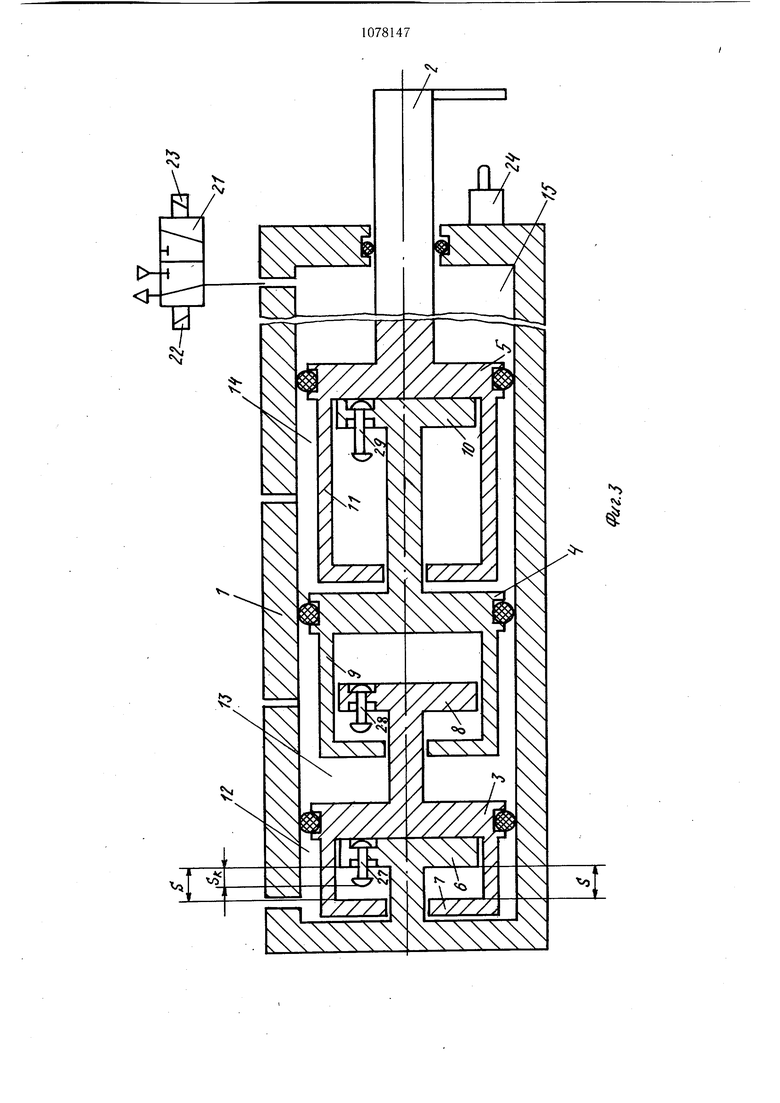
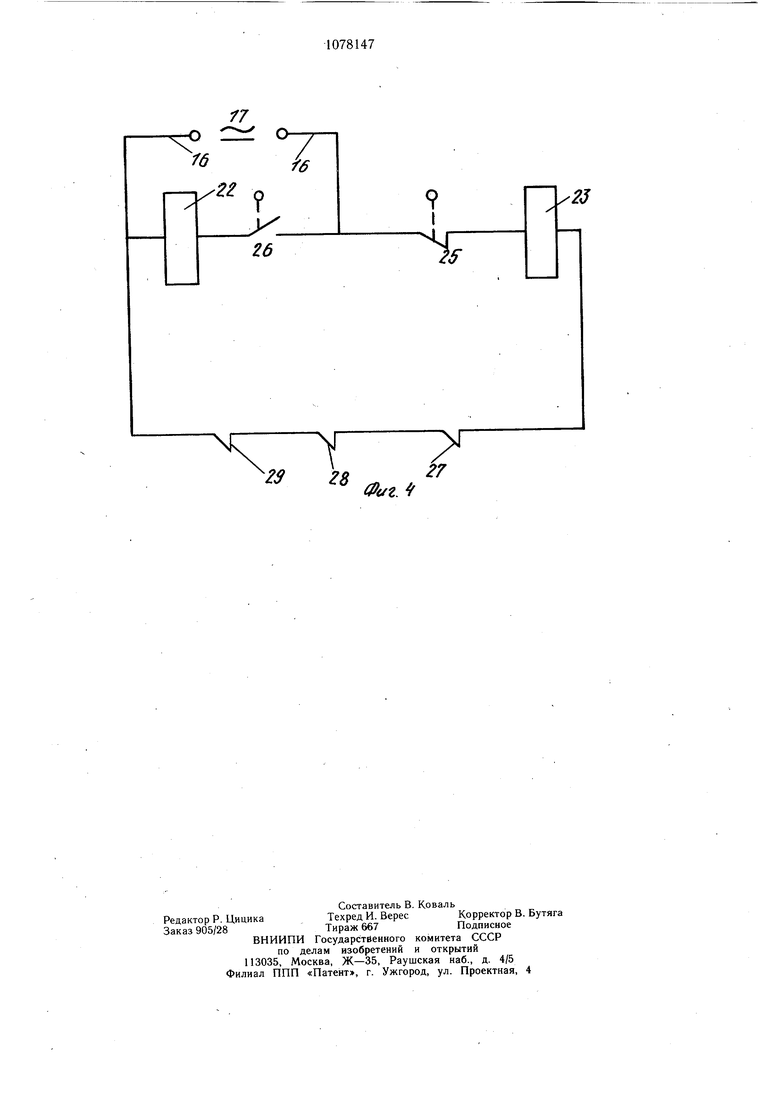
1 Изобретение относится к автоматическому управлению и может быть использовано в системах программного управления, содержащих многопоршневые пневмодвига тели. Известен позиционный пневмопривод, содержаш,ий токопроводящие цилиндр, выходной шток и поршни, установленные в цилиндре с возможностью взаимодействия между собой через ограничители и с .образованием рабочих и возвратной полостей и10 управля1рщую систему, включающую датчик положения поршней, выполненный в виде счетчика, двух фотоэлементов, взаимодействующих с двумя источниками света 1. Недостатком известного позиционного пневмопривода является сложность управляющей системы, так как информация о копечном положении выходного штока выдается в виде комбинации единичных и нулевых сигналов и для ее преобразования не-2о обходимо сравнивающее устройство. Известен также позиционный пневмопривод, содержащий токопроводящие цилиндр, выходной шток и поршни, установленные в цилиндре с возможностью взаимодействия между собой через ограничители25 и с образованием рабочих и возвратной полостей и управляющую систему, включающую датчик положения поршней, а датчик положения выполнен в виде неподвижных сопел, установленных с возможностью вза-, имодействия с перемещающейся вместе с выходным штоком заслонкой 2. . Недостатками такого позиционного пневмоп ривода является сложность управляю; щей системы, обусловленная конструкцией датчика положения и наличием дополни-35 тельного источника пневматической энергии, и недостаточная надежность в виде определенной ориентации заслонки относительно СППР П ,;; , Кроме того, он имеет пониженные быстродеиствие и нагрузочную способность из-за40 наличия в возвратной полости постоянного давления подпора, создающего при рабочем ходе выходного штока дополнительное сопротивление. Целью изобретения является упрощение 5 конструкции и повышение на дежности, кроме того, повышение быстродействия и нагрузочнои способности пневмопривода. Поставленная цель достигается тем, что позиционный пневмопривод, содержащий токопроводящие цилиндр, выходной шток и поршни, установленные в цилиндре с возможностью взаимодействия между собой через ограничители и с образованием рабочих и возвратной полостей, и управляющую систему, включающую датчик положе-55 ния поршней, причем датчик положения поршней выполнен в виде электрической цепи, подключенной к цилиндру и выходному 10781 7 2 штоку, поршни и выходной шток выполнены электроизолированными от цилиндра, а смежные ограничители электроизолированы один от другого в радиальном направлении, При этом датчик положения поршней может быть снабжен установленными на ограничителях подвижными контактами, причем ход каждого из контактов меньше хода последующего поршня. Пневмопривод выполнен с демпфирующим устройством, подключенным к электрической цепи. Кроме того, пневмопривод выполнен с электроуправЛяемым распределителем возвратной полости с управляющими входами, а датчик положения поршней дополнительно снабжен нормально замкнутым и разомкнутым контактами, установленными с возможностью взаимодействия с выходным штоком, в его исходном положении и включенными в электрическую цепь, а последняя связана с управляющими входами распределителя возвратной полости. На фиг. 1 представлена принципиальная схема предлагаемого пневмопривода; на фиг, 2 - то же, с подвижными контактами, установленными на ограничителях, и демпфирующим устройством; на фиг. 3 - то же, с дополнительными нормально замкнутым и разомкнутым контактами и распределителем возвратной полости; на фиг. 4 - схема подключения нормально замкнутого и разомкнутого контактов в электрическую цепь на фиг. 3. Позиционный пневмопривод, содержит ф токопроводящие цилиндр 1, вы 3-5, установленные цилиндре 1 с возможностью взаимодействия между собой через ограничители 6j j . образованием рабочих полостей 12j и возвратной полости 15, управляющую систему, включающую датчик положения U о поршней, выполненный в виде электричес jg подключенной к цилиндру 1 2, с установленным в ней источником 17 электропитания (фиг. 1, 2 4). Кроме того, управляющая система на ф„ j включает реле 18 с выходом 19, 2 - демпфируюш ее устройство 20, обеспечивающее вязкое трение на выходном 2, т.е. торможение штока 2 с воз о ностью его относительного перемещения подключенное к выходу 19 реле 18, выдающее импульсный сигнал на выходе 19 с задержкой по переднему фронту. На фиг. 3 и 4 управляющая система изображена с распределителем 21 возвратной полости 15 с управляющими входами 22 и 23, выключателем 24 исходного положения с нормально замкнутым контактом 25 и нормально разомкнутым контактом 26. На фиг. 2 и 3 датчик положения снабжен установленными на ограничителях 6, 8 и 10 подвижными контактами, соответственно, 27-29 ход S каждого из которых меньше хода S последующего поршня, соответственно 3-5. На фиг. 4 контакты 27-29 показаны условно. Смежные ограничители 6-11 электроизолированы в радиальном направлении посредством, например, гарантированного зазора. Позиционный пневмопривод работает следующим образом. В исходном положении поршни 3-5 находятся в крайнем левом по чертежу (фиг. 1 и 2) положении под действием усилия со стороны возвратной полости 15, связанной с источником питания (на фиг. 1 и 2 не показан). Токопроводящие торцы поршней 3-5 и ограничителей 6, 8 и 10 взаимодействуют один с другим, а торец доршня 3 - через ограничитель 6 с цилиндром 1, замыкая электрическую цепь 16, выходной шток 2 и цилиндр 1. На выходе 19 реле 18 (фиг. 1 и 2) появляется выходной сигнал, указывающий на. то, что поршни 3-5 находятся в исходном положении. При поступлении управляющего сигнала, например, в рабочую полость 14 (фиг. 1 и 2) поршень 5 перемещается вправо по чертежу и отходит от ограничителя 10, размыкая электрическую цепь 16. Реле 18 (фиг. 1 и 2) отключается, и на выходе 19 сигнал исчезает. Поршень 5 перемещается до тех пор, пока ограничители 10 и 11 не войдут во взаимодействие, замыкая при этом электрическую цепь 16. При этом на выходе 19 реле 18 появляется сигнал, показывающий, что позиционирование окончено. На фиг. 2 пневмопривод при подходе к заданной координате работает следующим образом. При приближении ограничителя 1 поршня 5 к ограничителю 10 электрическая цепь 16 замыкается через подвижный контакт 29. На быходе 19 реле 18 появляется сигнал, включающий демпфирующее устройство 20. Окончательное перемещение поршня 5 до посадки на ограничитель 10 происходит с пониженной скоростью, настраиваемой демпфирующим устройством 20. При посадке цоршня 5 на ограничитель 10 контакт 29 перемещается в крайнее правое положение, подготавливаясь к работе при перемещении поршня 5 в противоположное направление. После окончания перемещения реле 18 прерывает сигнал на выходе 19. Повторный сигнал на включение демпфирующего устройства 20 появляется после исчезновения и повторного появления сигнала в электрической цепи 16 при замыкании цилиндра 1 с выходным штоком 2. Пневмопривод, представленный на фиг. 3 работает следующим образом. Исходное положение поршней 3- 5 соответствует описанному положению их на фиг. 1 и 2. Электрическая цепь 16 (фиг. 4) замкнута. Шток 2 взаимодействует с выключателем 24 исходного положения. При этом контакт 25 размыкается, а контакт 26 замыкается. Сигнал с контакта 26 поступает на управляющий вход 22 распределителя 21, устанавливая последний в позицию, при которой возвратная полость 15 сообщается с атмосферой. При поступлении управяющего сигнала, например, в рабочую полость 13 поршень 4 со штоком 2 перемещается вправо гго чертежу(фиг. 3), размыкая при этом электрическую цепь 16, одновременно освобождая выключатель 24. Происходит быстрый разгон и перемещение выходного штока 2, поскольку возвратная полость 15 соединена с атмосферой. На управляющие входы 27 и 28 распределителя 21 сигналы не подаются. При взаимодействии поршня 4 с подвижным контактом 28 ограничителя 8 электрическая цепь 16 вновь замыкается, и сигнал с замкнутого контакта 25 поступает на управляющий вход 23 распределителя 21, устанавливая последний в позицию, при которой возвратная полость 15 сообщается с источником питания (на фиг. 3 не показан), обеспечивая предотвращение инерционного перебега поршня 5 и торможение поршня 4, а следовательно и выходного штока 2 при подходе к заданной координате. После снятия управляющего сигнала с рабочей полости 13 поршни 4 и 5 под действием давления питания, подаваемого в возвратную полость 15, возвращаются в исходное положение. При возврате в исходное положение выходного штока 2 происходит размыкание контакта 25 и в дальнейшем замыкание контакта 26, выдающего на управляющей вход 22 распределителя 21 сигнал, обеспечивающий переключение последнего в позицию, при которой возвратная полость 15 сообщается с атмосферой. Пневмопривод принимает исходное состояние. При поступлении новых комбинаций управляющих сигналов пневмопривод (фиг. 1 - 3) работает аналогичным образом. Подвижные контакты 27-29 могут быть размещены как на ограничителях 6, 8 и 10 так и на ограничителях 7, 9 и 11. Подвижные контакты 27-29 могут быть выполнены не только в виде стержней, но и в виде пружин и т.п. Технико-экономическая эс{)фективность от использования предлагаемого пневмопривода заключается в упрощении конструкции путем уменьшения количества использованных деталей в датчике положения, уменьшении трудоемкости его изготовления и упрощении обслуживания. Кроме того, использование предлагаемого пневмопривода повышает надежность быстродействия и нагрузочную способность путем демпфирования хода выходного штока и управления возвратной полостью, что в,целом расширяет область его применения и повышает производительность автоматизированного оборудования, в котором пневмопривод применяется.
а,. .
/л;
| название | год | авторы | номер документа |
|---|---|---|---|
| Демпфируемый позиционный привод | 1984 |
|
SU1206498A1 |
| Пневмопривод промышленного робота | 1986 |
|
SU1364781A1 |
| Следящий позиционный пневмопривод | 1983 |
|
SU1110946A1 |
| Реверсивный позиционный пневмогидравлический привод | 1974 |
|
SU465864A1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| Устройство управления пневмодвигателем тали | 1986 |
|
SU1379246A2 |
| Способ заполнения кассеты для выращивания растений и устройство для его осуществления | 1989 |
|
SU1701143A1 |
| Бункерное устройство | 1981 |
|
SU1028563A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU1019118A1 |
1. ПОЗИЦИОННЫЙ ПНЕВМОПРИВОД, содержащий токопроводящие цилиндр, выходной шток и поршни, установленные в цилиндре с возможностью взаимодействия между собой через ограничители и с образованием рабочих и возвратной полостей, и управляющую систему, включающую датчик положения поршней, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, датчик положения поршней выполнен в виде электрической цепи,- подключенной к цилиндру и выходному штоку, поршни И выходной шток выполнены электроизолированными от цилиндра, а смежные ограничители электроизолированы один от другого в радиальном направлении. 2.Пневмопривод по п. 1, отличающийся тем, что датчик положения поршней снабжен установленными на ограничителях подвижными контактами, причем ход каждого из контактов меньше хода последующего поршня. 3.Пневмопривод по пп. 1 и 2, отличающийся тем, что он выполнен с демпфирующим устройством, подключенным к электрической цепи. 4.Пневмопривод по пп. 1 и 2, отличающийся тем, что, с целью повышения-быстродействия и нагрузочной способности, он -выполнен с электроуправляемым распределителем возвратной полости с управляющими входами, а датчик положения поршней дополнительно снабжен нормально замкнутым и разомкнутым контактами, установленными с возможностью взаимодействия с выходным штоком в его исходном положении и включенными в электрическую цепь, а последняя связана с управляющими входами распределителя возвратной полости.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ изготовления гнутых профилей | 1986 |
|
SU1396356A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Демпфируемый позиционный привод | 1979 |
|
SU853203A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
