1
(21)4464547/25-29
(22)22.07.88
(46) 07.05.90. Бюл. К 17
(71)Научно-производственное объединение по топливной аппаратуре двигателей
(72)М.В.Райцин, А.Б.Бененсон, И.Б.Филипов и А.В.Королев
(53)621-526 088.8)
(56)Кудрявцев А.И. и др. Пневматические и пневм огидравлические приводы для систем числового программного управления технологическим оборудованием. Обзор. М.: НИИмаш, 1978, с. 30, рис. 16.
(54)СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ ПОЗИЦИОННЫМ ПНЕВМОПРИВОДОМ
(57)Изобретение может быть использовано в различном автоматическом оборудовании и промышленных роботах.
Цель изобретения - повышение надежности и точности позиционирования. Управление осуществляют путем попеременного впуска и выпуска рабочей среды под давлением в полостях 2 и 3 пневмодвигателя 1 с определенным периодом в два этапа. На первом этапе период впуска-выпуска постоянен, а на втором этапе после первой остановки рабочего органа 8 увеличивают период впуска-выпуска рабочей среды до его страгивания, определяют рассогласование и изменяют в соответствии с ним отношение времени впуска к полному периоду. Дополнительно может быть осуществлен третий этап управления, на котором уменьшают период впуска-выпуска рабочей среды до остановки рабочего органа 8. 1 з.п. ф-лы, 1 ил.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный позиционный пневмопривод | 1984 |
|
SU1231283A1 |
| Позиционный пневмопривод | 1987 |
|
SU1481501A1 |
| Позиционный пневмопривод | 1986 |
|
SU1418511A1 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Позиционный пневмопривод | 1982 |
|
SU1090936A1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Позиционный пневмопривод | 1986 |
|
SU1359503A1 |
| Позиционный следящий привод | 1986 |
|
SU1399522A1 |
| Способ управления позиционным пневмоприводом | 1989 |
|
SU1716200A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
Изобретение может быть использовано в различном автоматическом оборудовании и промышленных работах. Цель изобретения - повышение надежности и точности позиционирования. Управление осуществляют путем попеременного впуска и выпуска рабочей среды под давлением в полостях 2 и 3 внемодвигателя 1 с определенным периодом в два этапа. На первом этапе период впуска-выпуска постоянен, а на втором этапе после первой остановки рабочего органа 8 увеличивают период впуска-выпуска рабочей среды до его страгивания, определяют рассогласование и изменяют в соответствии с ним отношение времени впуска к полному периоду. Дополнительно может быть осуществлен третий этап управления, на котором уменьшают период впуска-выпуска рабочей среды до остановки рабочего органа 8. 1 з.п. ф-лы, 1 ил.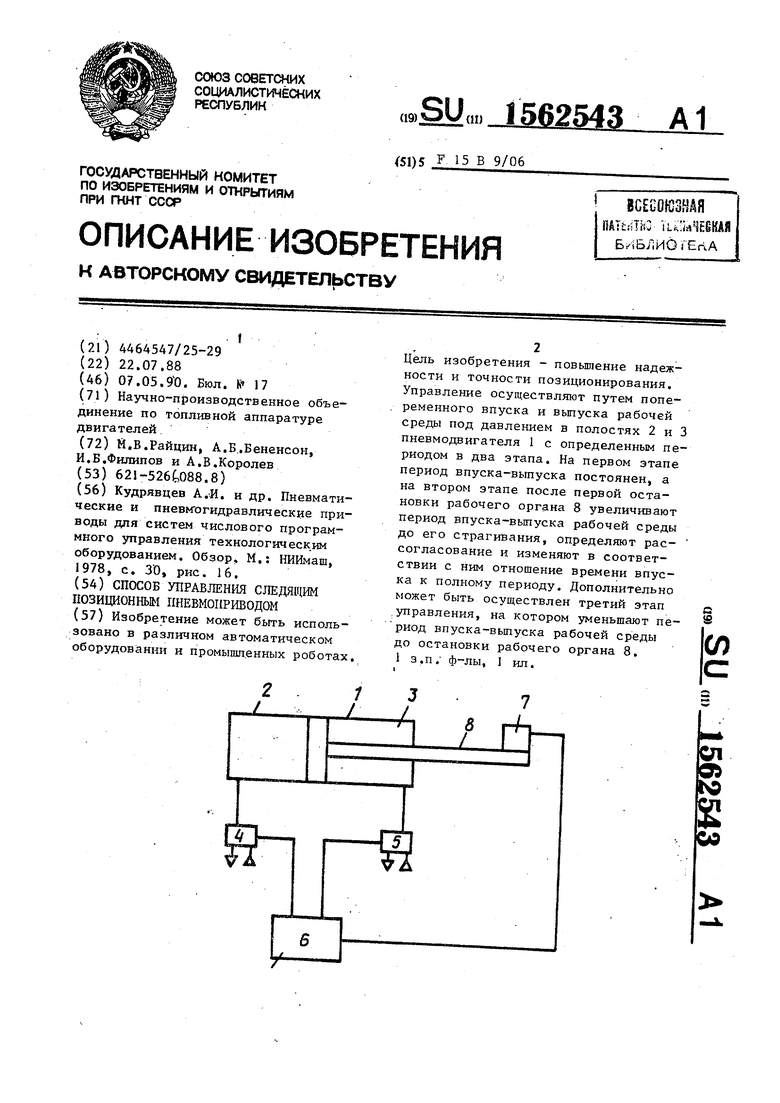
И
5
t
И
Изобретение относится к внемати- ческим устройствам, предназначенным для перемещения рабочих органов из одного положения в другое, и может найти применение в различном автоматическом оборудовании и промышленных роботах.
Цель изобретения - повышение надежности и точности позиционирования.
На чертеже представлена принципиальная схема пневмопривода.
Пневмопривод содержит пневмодвигатель J с рабочими полостями 2 и 3, в которые осуществляется попеременный впуск и выпуск рабочей среды соответственно клапанами 4 и 5. Управление клапанами 4 и 5 происходит от блока 6 управления, который связан с датчиком 7 положения рабочего органа 8.
Управление осуществляют следующим образом.
На первом этапе управления в рабочие полости 2 и 3 пневмодвигателя 1 соответственно через клапаны 4 и 5 обеспечивает попеременный впуск и выпуск рабочей среды под давлением с постоянным определенным периодом, задаваемым от блока 6 управления и без колебаний рабочего органа 8 в любой точке его кода.
После задания требуемого положения рабочего органа 8 в пределах его хода осуществляют сравнения фактического положения рабочего органа, определяемого при помощи датчика 7 с заданным, и непрерывно определяют в блоке 6 управления рассогласование, в соответствии с которым непрерывно изменяют отношение времени впуска к полному периоду, что приводит к созданию необходимого перепада давлений в полостях 2 и 3, перемещению рабочего органа 8 и его первой остановке в результате действия сил сухого трения около требуемого положения.
После первой остановки рабочего органа 8 осуществляют второй этап управления, на котором для компенсации сил сухого трения колебаниями давления в полостях 2 и 3 пневмодвигателя 1 увеличивают период впуска-, выпуска рабочей среды до страгива- ния рабочего органа 8, что фиксируется при помощи датчика 7 и блока 6 управления. После отрагивания рабочего
10
15
органа 8 период впуска-выпуска оставляют неизменным и продолжают определять рассогласование между факти- к ческим положением рабочего органа 8 и заданным и изменять в соответствии с рассогласованием отношение времени впуска рабочей среды и полному периоду. В результате этого рабочий орган 8 перемещается в требуемое положение и начинает совершать колебания около него, чем обеспечивается высокая точность позициониров&ния и максимальная чувствительность пневмопривода, что повышает надежность позиционирования .
В случае, когда колебания рабочего органа 8 около требуемого положения нежелательны, дополнительно осуществляют третий этап управления, на котором уменьшают период впуска-выпуска рабочей среды до остановки рабочего органа 8, При этом его остановка происходит при минимальном рассогласовании от требуемого положения в пределах зоны, определяемой силами сухого трения в пневмоприводе ив связанном с ним . оборудовании, чем обеспечивается максимальная точность позиционирования.
Использование предлагаемого способа управления следящим позиционным пневмоприводом позволяет повысить точность и надежность позиционирования привода, что расширяет функциональные возможности автоматических устройств с позиционным пневмоприводом и приводит к повышению производительности труда.
20
25
30
35
Формула изобретения
515625436
два этапа, причем на первом этапе отношение времени впуска к полному
период впуска постоянен, а после пер- периоду, вой остановки рабочего органа в ре-.
зульта те первого этапа управления2. Способ по п. 1, о т л и ч а увеличивают на втором этапе периодю щ и и с я тем, что дополнительно
впуска-выпуска рабочей среды до стра- осуществляют третий этап управления, гивания рабочего органа, после чего для чего уменьшают период впускапродолжают определять рассогласова-выпуска рабочей среды до остановки
ние и изменять в соответствии с ним JQ рабочего органа.