Изобретение относится к робототехнике и может быть использовано в конструкциях адаптивных роботов, приспосабливающихся к весу захваты- ваемых деталей.
Целью изобретения является обеспечение надежности работы схвата за счет выполнения бесконтактным датчика проскальзывания.
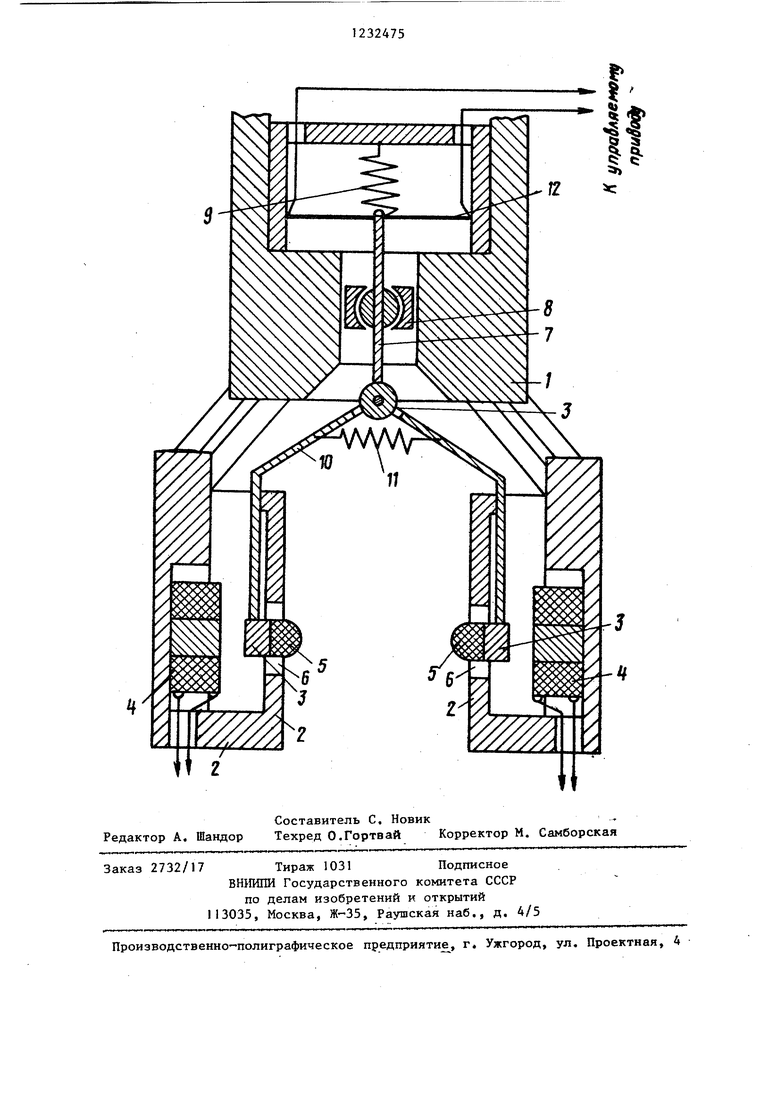
На чертеже изображен предлагаемый схват, общий вид.
Схват содержит установленные в корпусе I губки 2 с приводом их перемещения (не показан) и датчик проскальзывания, включающий рабочие головки - :5сновную и дополнительную с основани- .м 3 из магнитопроводного материала, расположенные соосно электромагнитам 4, установленным в губках 2, и с наконечниками 5 из эластичного материала, закрепленными на основании 3 и расположенными в пазах 6, выполненных в губках.
Датчик проскальзьтания включает также шток 7, шарнирно связанный с подвижной относительно корпуса 1 опорой 8 и подпружиненный к корпусу пружиной 9, рычаги 10, расположенные в губках 2 и подпружиненные друг к другу пружиной Н, и пластину 12, выполненную из электр|опроводного эластичного материала, например электропроводной резины, которая закрёплен а в корпусе I и жестко связана со штоком 7,
Одни концы рычагов 10 шарНирно связаны между собой и со штоками 7, а на других свободных концах закреплены рабочие головки.
Схват очувствленного робота работает следующим образом.
Перед захватом детали под действием пружины I1 наконечники 5 рабочих
0
5
0
5
0
головок выступают в пазах 6 над поверхностью губок 2. В момент захвата детали последняя приходит в соприкосновение с наконечниками 5 и утапливает их в пазах 6. Поскольку пружина И стремится свести рычаги 10, то они, имея вид клещевого замка, жестко фиксируются наконечниками 5 на детали. Если при пробном движении деталь начинает проскальзывать, то рычаги 10, не связанные жестко с губками 2, начинают перемещение относительно них вместе с деталью по ходу ее проскальзывания.
При этом перемещается шток 7. Опора 8 позволяет рычагам 10 смещаться при любом направлении проскальзывания детали. Перемещение штока 7 вызывает деформацию пластины 12 из электропроводящей резины, с центром которой . шток 7 жестко связан, а следовательно, вызывает изменение ее электрического сопротивления.
Изменение сопротивления пластины 12 является выходным сигналом блока регистрации сигнала проскальзывания и командой управляемому приводу для увеличения сдавливающего усилий.
Одновременно подается питание на электромагниты 4, которые притягивают основания 3, оттягивая рабочие головки от поверхности детали, а прули- на 9 возвращает рычаги 10 в исходное состояние.
Если величины сдавливающего усилия недостаточно для удержания детали, то на следующем пробном шаге электромагниты 4 обесточиваются и все операции повторяются. Процесс адаптации захвата к весу детали осуществляется до тех пор, пока не будет обеспечено сдавливающее усилие, достаточное для удержания детали.
Составитель С, Новик.
Редактор А. Шандор Техред О.Гортвай Корректор М. Самборская
Заказ 2732/17 Тираж 1031 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб,, д. 4/5
Производственно- полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват очувствленного робота | 1984 |
|
SU1227462A1 |
| Схват очувствленного манипулятора | 1984 |
|
SU1252168A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Очувствленный захват робота | 1985 |
|
SU1296406A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват | 1977 |
|
SU659377A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |

| Промышленные роботы./Под ред | |||
| Ю | |||
| Г | |||
| Козырева, М,: Машиностроение, 1983, с | |||
| Трансляция, предназначенная для телефонирования быстропеременными токами | 1921 |
|
SU249A1 |
