2. Схват по п. 1, отличающийся тем, что демпфер колебаний платформы выполнен в виде магнитов, расположенных по ок- )ужности на внутренней поверхности губки с чередованием полюсов, и пластины из то- копроводящего материала, жестко связанной
Изобретение относится к робототехнике и может быть использовано в конструкциях адаптивных роботов, приспосабливающихся к весу захватываемых деталей.
Целью изобретения является повышение производительности и обеспечение надежности захвата за счет самоориентации датчика проскальзывания захваченной детали.
На фиг. 1 изображена губка схвата с датчиком проскальзывания; на фиг. 2 - разрез А-А на фиг. 1.
Губка 1 схвата (фиг. 1) связана с приводом, снабженным блоком управления (не показаны), и имеет цилиндрическую полость 2, внутри которой на полой оси 3 с помощью подщипника 4 закреплена платформа 5. На платформе 5 закреплена ось ролика 6. К поверхности ролика б подведены оптово- .локонные световоды 7, которые закреплены внутри оси 3 и подключены другими концами к источнику 8 и приемнику 9 светового сигнала. В качестве источника и приемника светового сигнала могут служить, например, лампа накаливания и фотоэлемент соответственно. На платформе 5, кроме того, одним концом закреплен кронштейн 10 с грузом 11 на другом конце из токопроводя- щего материала, а также пластина 12 из то- копроводящего материала, которая вместе с магнитами 13, расположенными по окружности на внутренней стороне цилиндрической полости 2, образует демпфер колебаний платформы 5. Ось 3 жестко закреплена в корпусе губки 1 перпендикулярно ее рабочей поверхности.
На образующей поверхности ролика 6 выполнены светоотражающие участки, расположенные вдоль оси ролика и разделенные интервалами 14, покрытыми светопоглощаю- щим материалом. Оптоволоконные световоды 7 (фиг. 1) закреплены в оси 3 таким образом, чтобы световой сигнал проецировался световодом 7, подведенным от лампы накаливания в ту же точку на поверхности ролика 6, с которой световодом 7, подведенным от фо- тоэлемента 9, будет считываться сигнал.
Схват очувствленного робота работает следующим образом.
Когда схват, ориентированный различным образом, подводится к детали, которую необходимо захватить, груз 11 под действием си-
с платформой и расположенной против полюсов магнитов.
3. Схвзт по пп. 1 и 2, отличающийся тем, что он снабжен кронштейном, закрепленным на платформе, а уравновешивающий груз установлен на конце кронштейна.
0
5
0
лы тяжести опускается вниз и поворачивает платформу 5, а следовательно, и ролик 6. Вместе с платформой 5 изменяет свое положение и пластина 12. В ней при перемещении над полюсами магнитов индуцируются токи, а магнитное поле, создаваемое этими токами, взаимодействует с магнитным полем магнитов 13 и создает силу, которая согласно закону Ленца тормозит пластину 12, а следовательно, и основание 5, с которыми пластина 12 жестко связана. Таким образом, демпфер предотвращает возникновение колебаний платформы 5 при установлении ее в новом положении. Благодаря грузу 11 ось щтока устанавливается по направлению силы тяжести, а следовательно, ось вращения ролика 6 устанавливается перпендикулярно вектору силы тяжести, т. е. перпендикулярно направлению предполагаемого проскальзывания. Таким образом, после установления схвата в исходном состоянии ролик 6 всегда устанавливается в положение, максимально благоприятное для регистрации проскальзывания, т. е. датчик проскальзывания всегда имеет максимальную чувствительность независимо от ориентации схвата.
При захвате детали ее поверхность вступает в контакт с поверхностью ролика 6. Если при пробном движении деталь начинает проскальзывать, то ролик 6 начинает вращаться, светоотражающие участки начинают перемещаться относительно точки проекции светового сигнала на поверхность ролика 6 и световой сигнал попеременно то отражается, то поглощается этой поверхностью. При этом фотоэлемент 9 регистрирует пульсирующий световой поток, который затем преобразуется в электрические импульсы, поступающие на управляемый привод, увеличивающий величину сдавливающего усилия.
Если величины сдавливающего усилия недостаточно для удержания захватываемой детали, то на следующем пробном шаге все операции повторяются. Процесс адаптации схвата к весу захватываемой детали осуществляется до тех пор, пока не будет обеспечено сдавливающее усилие, достаточное для надежного удержания детали.
Фиг. 2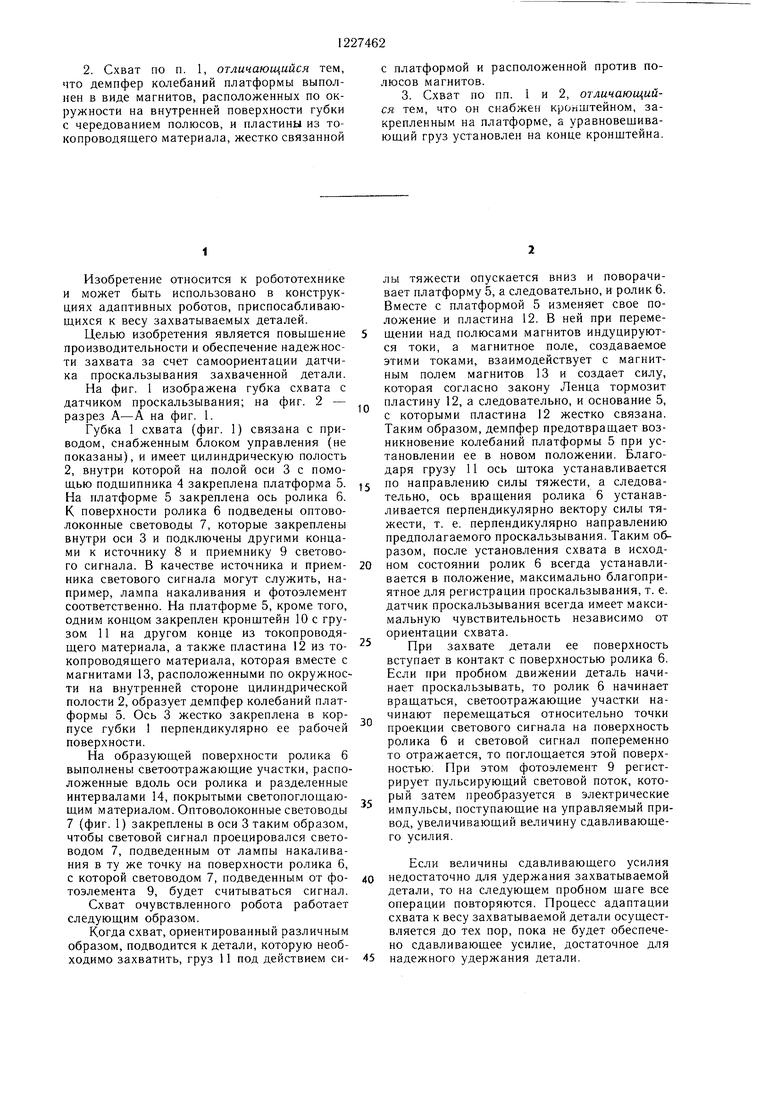
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват очувствленного робота | 1984 |
|
SU1232475A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ СОСТОЯНИЯ ВРАЩАЮЩЕГОСЯ ВОЛЧКА (ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ГЕОМЕТРИЗАТОР) | 1999 |
|
RU2172501C2 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Схват промышленного робота | 1985 |
|
SU1350002A1 |
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Устройство освещения для транспортных средств | 1968 |
|
SU457233A3 |
| Схват очувствленного манипулятора | 1984 |
|
SU1252168A1 |
| Схват манипулятора | 1980 |
|
SU931464A2 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |

| Промышленные роботы | |||
| / Под ред | |||
| Козырева Ю | |||
| Г | |||
| Справочник, М.: Машиностроение, 1983, табл | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Приспособление для картограмм | 1921 |
|
SU247A1 |
