Изобретение относится к области машиностроения, а именно к схватам, предназначенным для использования в промышленных роботах, в частности для сборочных работ.
Известен схват, предназначенный для закрепления объектов, в котором содержатся зажимные губки, кинематически связанные между собой .
Недостатком указанного схвата является невозможность самостоятельно приспосабливаться к изменяющимся условиям, например, регулируя силу зажатия объекта.
Наиболее близким решением из «звестных является схват, содержаш,ий зажимные губки, кинематически связанные между собой и шарнирно установленные на шпинделе привода, и систему управления 2.
Недостаток указанного схвата заключается в том, что ои не обладает достаточной надежностью и сложен по конструкции.
Целью настоящего изобретения является повышение надежности и упрошение конструкции.
Указанная цель достигается тем, что каждая губка снабжена грузом, центр тяжести которого смещен относительно оси шпинделя в сторону, противоположную этой губке, при этом на шпИиделе установлен датчик линейного перемещения системы управления, связанный с двигателем привода.
Привод снабжен соединительной муфтой с тормозом, а губка выполнена в виде подпружиненной призмы, установленной на шарнире.
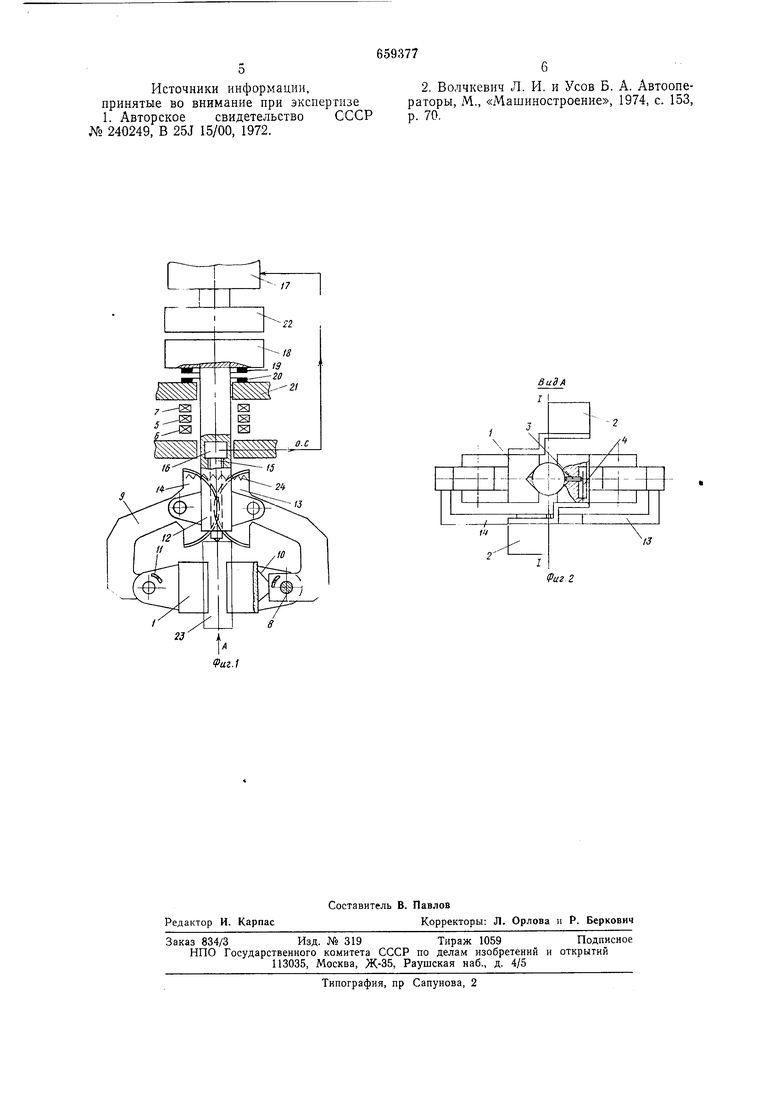
На фиг. 1 изображен общий вид схвата сборочного робота; на фиг. 2 - вид по стрелке А на фиг. 1 без электропривода и пружин.
Схват содержит две призмы 1, сое.т.иненные жестко с грузом 2. Каждый из грузов размещен так, что находится на противоположной стороне плоскости I-I по отношению к иризме, соединенной с этим грузом. Масса груза выбирается так, чтобы центробежная сила его инерции при вращении была больше соответствующей силы инерции призмы и связанных с нею частей. В призмы встроены штоки 3, контактируюшие с тензодатчиками 4, электрически соединенными с токосъемниками 5 и 6. Подвод энергии к тензодатчикам осуществляется по токосъемнику 7.
Призмы крепятся на шарнирах 8 к рычагам 9 и фиксируются V-образными пружинами 10. В призмы и рычаги вмонтированы штыри И, являющиеся ограничителями поворота. Рычаги 9 шарнирно установлены на шнинделе 12 и кинематически связаиы друг с другом зубчатыми секторами 13 и 14.
В шпиндель 12 соосно ему вмонтирован подвижный шток 15, связанный с датчиком 16, например индуктивным, электрически соединенным с электродвигателем 17.
На шпиндель 12 подвижно вдоль его оси установлена переключаюшая электромагнитная полумуфта 18, причем с противоположного конца на ней укреплен тормозной диск 19. Второй тормозной диск 20 установлен на корпусе 21. Вторая электромагнитная фрикционная иолумуфта 22 неподвижно закреплена на валу электродвигателя 17.
В захвате крепится деталь 23. Разведение призм осуществляется пружиной 24.
Схват работает следуюш,им образом.
Вращение от электродвигателя 17 через полумуфты 18 и 22 -передается на шпиндель 12, нричем сцеплением и расцепление1М полумуфт 18 и 22 управляет программное устройство робота; при расцепленных полумуфтах 18 и 22 полумуфта 18 сцепляется тормозным диском 19, установленным на ее торце, с тормозным диском 20, установленным на корпусе 21, и поэтому шпиндель 12 останавливается. Включение полумуфт 18 и 22 можно осуществлять при работающем электродвигателе 17,
При расцепленных полумуфтах 18 и 22 пружина 24 разводит призмы 1, и захват свободно находит на деталь 23. При вращении шпинделя 12 (т. е. при сцепленных полумуфтах) грузы 2 под действием центробежных сил инерции -сводят призмы 1, которые были разведены пружиной 24, и зажимают деталь 23.
В случае, если сила зажима деталл 23 недостаточна, она начинает проскальзывать вниз. Шток 15, контактирующий -с деталью, перемещается вслед за ним, воздействуя при этом на датчик 16, вырабатывающий сигнал обратной связи на обмотку возбуждения электродвигателя 17. Число оборотов электродвигателя возрастает, соответственно увеличивается и усилие зажима детали - до прекращения проскальзывания. Шток 15 перестает перемещаться, рост числа оборотов электродвигателя 17 прекращается и соответственно фиксируется усилие зажима детали.
Деталь 23 посредством штоков 3 действует на тензодатчики 4, крторые вырабатывают сигнал о размере и геометрии детали, который по токосъемникам 5 и 6 передастся в память электронно-вычислительной машины робота. Подвод энергии « тензодатчикам осуществляется через токосъемник 7.
Для того чтобы контакт детали 23 с призмами 1 осуществлялся по линиям, а не по точкам, предусмотрено соединение призм 1 н рычагов 9 посредством шарниров 8 и
плоских пружин 10. При этом повороты призм ограничиваются штырями 11.
Для синхронного сведения и разведения призм 1 рычаги 9 связаны зубчатыми секторами 13 и 14.
Вращение схвата вместе с собираемой деталью позволяет сократить время, затрачиваемое на сборку, так как при вращении детали сила трения-скольжения, препятствующая перемещению торца детали по торцу втулки, меняет направление на 90°, т. е. для перемещения сопрягаемых деталей требуется значительно меньшее усилие, а это в свою очередь уменьшает время, потребное на такое перемещение.
Вращение схвата вместе с собираемой деталью повышает надежность собираемости деталей, так как врашение детали снособствует тому, что ее торец несколько раз
пройдя над отверстием втулки (благодаря прецессии шпинделя 12), западает в него, в то время как при неподвижном шпинделе детали, оси которых не совпадают, просто не собрались бы.
Вращение схвата позволяет упростить конструкцию устройства, так как отпадает необходимость в специальных механизмах для осуществления сборки, например следящих за положением оси втулки или создающих вибрацию какой-либо из собираемых деталей.
Сведение и разведение призм схвата возможно без остановки электродвигателя или изменения направления его вращения, а
просто благодаря изменению числа оборотов электродвигателя, что также упрощает конструкцию и схему управления схватом. При малой скорости вращения призмы не только уменьшают силу зажима, но и
могут быть разведены.
Формула изобретения
1. Схват, например сборочного робота, содержащий зажимные губки, кинематически связанные между собой и шариирно установленные на шпинделе привода, и систему управления, отличающийся тем,
что, с целью повышения надежности и упрощения конструкции, 1каждая губка снабжена грузом, центр тяжести которой смещен относительно оси шпинделя в сторону, противоположную этой губке, при этом на
шпинделе установлен датчик линейного перемещения системы управления, связанный с двигателем привода.
2.Схват по п. 1, отличающийся тем, что привод снабжен соединительной муфтой и тормозом.
3.Схват по п. 1, отличающийся тем, что губка выполнена в виде подпружиненной призмы, установленной на щарнире,
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 240249, В 25J 15/00, 1972.
2. Волчкевич Л. И. и Усов Б. А. Автооператоры, М., «Машиностроение, 1974, с. 153, р. 70,
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
виЗл
13
2
Фиг г
