Изобретение относится к автоматическому управлению электроприводами и предназначено для управления электроприводом драглайна.
Целью изобретения является повышение надежности работы за счет исключения ложных срабатываний.
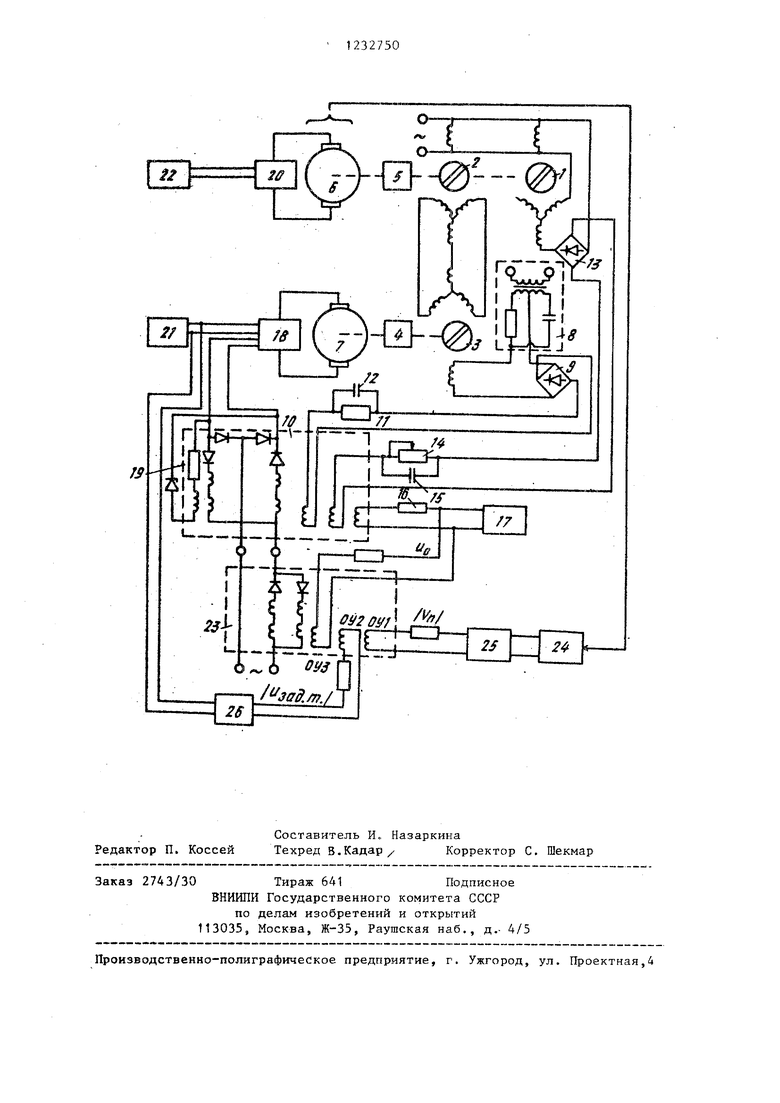
На чертеже изображена функциональная схема устройства.
Устройство содержит сельсины-датчики 1-3 измерения длины подъемного каната и суммы длин подъемного и тягового канатов, соединенные через понижающие редукторы 4 и 5 с валами подъемного 6 и тягового 7 двигателей углы поворота которых пропорциональны изменению длин канатов.
Выход сельсина-датчика 3, последовательно с которым включен фазо- сдвигающий мостик 8, подключен через выпрямительный мост 9 на вход усилителя 10 для формирования траектории транспортирования ковша через резистор 11 и конденсатор 12. Выход сельсина-датчика 1 через выпрямительный мост 13 подключен на вход усилителя 10 через регулируемый резистор 14 и конденсатор 15. Через резистор 16 на вход усилителя 10 подключен источник 17 постоянного напряжения.
Выход усилителя 10 подключен к
преобразователю 18, питающему двигатель 7 механизма тяги. В цепь обратной связи усилителя 10 включен, стабилитрон 19, ограничивающий выходное напряжение усилителя допустимым значением управляющего сигнала привода тяги и исключающий появление управляющего сигнала при положении ковша ниже заданной траектории. Стабилитрон 19 может быть исключен из схемы, если характеристика усилителя обеспечивает ограничение выходного сигнала. Преобразователи 18 и 20, питающие соответственно двигатели 7 и 6 механизмов подъема и тяги, управляются соответствующими источниками 21 и 22 (командоаппаратами) задающего сигнала, включенными на их входах. Питание усилителя 10 осуществляется с выхода усилителя 23. Первый вход (обмотка управления ОУ1) усилителя 23 подключен к датчику 24 скорости двигателя 6 привода подъема через блок 25 выделения модуля,второй (обмотка управления ОУ-2)- к выходу источника 21 задающего сигнала привода тяги через второй блок 26 вы
232750
деления модуля, а третий вход - к источнику 17 постоянного напряжения. В качестве датчика скорости может использоваться также датчик ЭДС дви- 5 га те ля подъема,, датчик напряжения этого двигателя, а также возможно непосредственное подключение к якорной цепи двигателя. Последнее возможно потому, что во-первых требо- 10 вания к точности сигнала скорости привода здесь невелики и отличие напряжения двигателя от его ЭДС (и скорости) не являются здесь существенными и, во-вторых, обмотка управ- 15 ления ОУ1 обеспечивает гальваническую развязку основных цепей и цепей управления.
Устройство работает следующим 20 образом.
Усилитель 10 для формирования траектории транспортирования ковша обеспечивает движение ковша по заданной траектории в соответствии с 25 выражением
G -(:Ц-и,)„-а,п,)-К1,-1,). к.к„
где (1п+1); (1„-И); 1„; 1„ - те- 30 кущие и минимальные значения суммы длин подъемного и тягового канатов и длины подъемного каната;
G - сигнал, управления;
К - коэффициент задания тракто- рий;
К, - коэффициент зависимости сигнапа управления G от длин канатов.
35
Усилитель 23 обеспечивает включение и выключение усилителя 10 и осуществляет дополнительное регулирование сигнала управления приводом тяги в процессе транспортирования ковша в функции скорости привода подъема и формируемого машинистом задающего сигнала привода тяги в соответствии с вьфажением
бь„1}, /Vn/ - /и,ал.т/,
где и
выи
ч
-выходной сигнал второго усилителя j
-модуль сигнала, пропорционального скорости привода подъема, действует в сторону увеличения выходного напряжения усилителя 23;
.3
,а(л I МОДУЛЬ задающего сигнала привода тяги, дествует в сторону уменьшения выходного напряжения усилителя 23,
Перед началом транспортирования ковша (подъем загруженного ковша в точку разгрузки или опускание его в забой после разгрузки) машинист ставит ручку источника 21 задающего сигнала (командоаппарата) привода тяги в О, а источником 22 задающего сигнала разгоняет привод подъема до максимальной скорости. При этом на первую обмотку управления ОУ1 усилителя 23 поступает с датчика 24 скорости двигателя 6 привод через блок 25 выделения модуля модуль сигнала, пропорциональньй скорости привода подъема .Этот сигнал действует в сторону нарастания выходного сигнала усилителя 23, который обеспечивает включение усилителя 10, управляющего приводом тяги. Выключение обоих усилителей происходит плавно, пропорционально нарастанию скорости привода подъема обеспечивая тем самым и плавное выключение привода тяги, плавные переходные процессы,при этом исключаются рывки и дополнительные нагрузки на оборудование машин, повышается ндежность. Усилитель 10 обеспечивает движение ковша по заданной траектории и функционирует до тех пор, пок скорость привода подъема УП О, а задающий сигнал привода тяги от командоаппарата 21 0. Эти условия характеризуют режим тран327504
спортирования ковша. При других режимах (копание и разгрузка) на второй вход усилителя 23 (обмотка управления ОУ2) поступает от источни- 5 ка 21 задающего сигнала через блок 26 выделения модуля модуль задающего сигнала /и.д / привода тяги, который уменьшает выходное напряжение усилителя 23 до нуля, обесточивая
10 тем самым усилитель 10 и прекращая подачу на преобразователь 18 привода тяги управляющего сигнала от рассматриваемого устройства управления. Сигнал UQ, поступающий на третий
5 вход усилителя 23 (обмотка управления ОУЗ) от источника 17 постоянного напряжения, создает небольшую зону нечувствительности усилителя 23, обеспечивающую более надежное - его
0 запирание при перемещении командоаппарата тяги или при скорости приво-- да подъема, близкой к нулю.
Таким образом, изобретение обес5 печивает выделение этапа транспортирования ковша из других этапов рабочего цикла, что исключает необходимость для машиниста осуществлять какие-либо дополнительные операции
0 для перехода к этому этапу и для; выхода из него, бесконтактное включение устройства управления после окончания процесса копания и переходе к этапу транспортирования ковша и его выключение после возвращения ковша в забой и исключение возможности нежелательного вмешательства устройства управления в работу привода тяги в режимах копания и разQ грузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство для управления электроприводами подъема и тяги драглайна | 1974 |
|
SU641038A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Способ управления драглайном и устройство его осуществления | 1989 |
|
SU1707148A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
Редактор П. Коссей
Составитель И. Назаркина
Техред В.Кадар/ Корректор С, Шекмар
Заказ 2743/30 Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.- 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 0 |
|
SU195077A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
