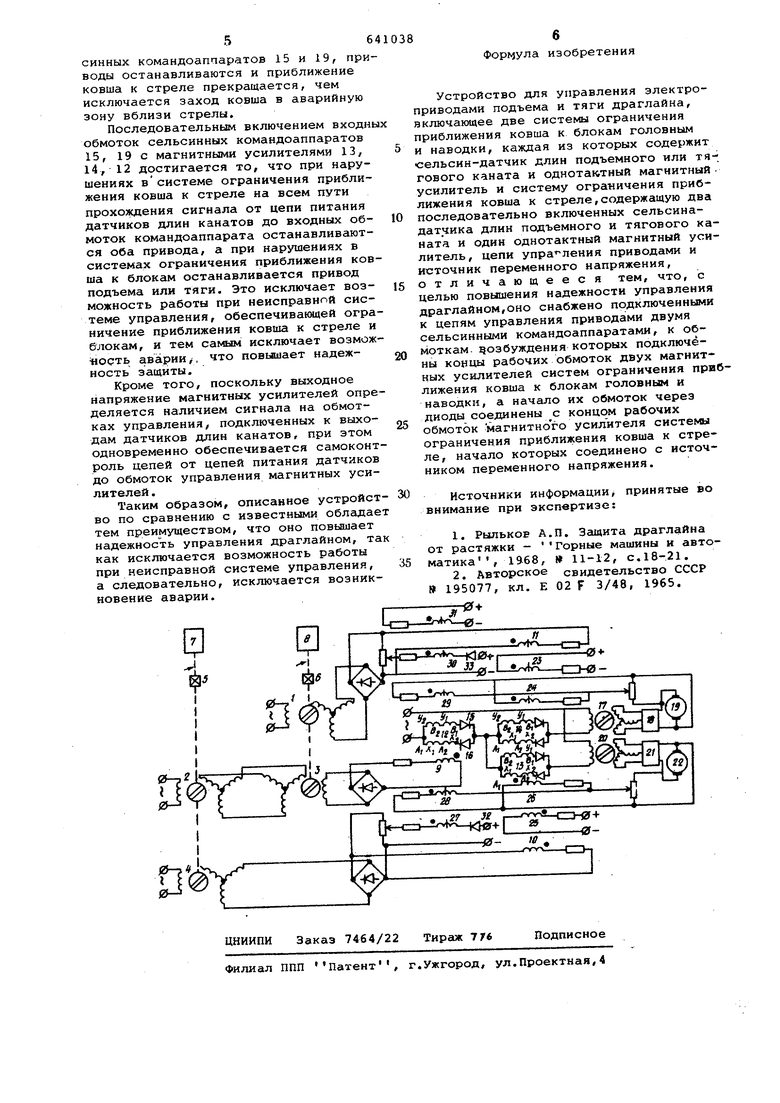
стреле, начало которых соединено с источником переменного напряжения. На чертеже изображена принципиаль ная схема предлагаемого устройства. Бесконтактные сельсины-датчики 1, 2,3,4 измерения длин канатов и их су мы соединены через понижающие редукторы 5, 6 с валами подъемной 7 и тяговой 8 лебедок, углы поворота которых пропорциональны изменению длин канатов. Сельсины 2 и 3 включены последова тельно .ПО схеме суммирования углрв поворота их роторов для измерения су глы длин подъемного и тягового канато а сельсины 1 и 4 включены по схеме индукционных датчиков углов поворота пропорциональных соответственно длине тягового и подъемного канатов. Выходы сельсинных датчиков 1,3,4 под ключены через выпрямительные мосты на.управляющие обмотки 9, 10, 11, соответственно трех однотактных магнитных усилителей 12, 13, 14. Начало рабочих обмоток магнитных усилителей 13, 14 через диоды 15, 16 соединены с концом рабочих обмоток магнитного усилителя 12. Конец рабочих обмоток усилителя 14 системы ограничения приближения ковша к тяговым блокам наводки подключен к обмотке возбужде ния сельсинного командоаппарата тяги 17. Рабочие обмотки сельсинного коман доаппарата 15 подключены к преобразователю 18 привода тяги, питающего тяговый двигатель 19. Конец рабочих обмоток усилителя 13 системы ограничения приближения ковша к головннлм блокам подключен к обмотке возбуждения сельсинного командоаппарата подъема 20. Рабочие обмотки сельсинного коман доаппарата 20 подключены к преобразователю привода подъема 21, питающего подъемный двигатель 22. К управ ляющим обмоткам 23, 24 однотактного магнитного усилителя 14 подключены источник постоянного сигнала и якорные зажимы двигателя 19 тяги. Аналогично к управляющим обмоткам 25, 26 однотактного магнитного усилителя 13 подключены источник постоянного сигнала и якорные зажимы двигателя подъ ма 22. К управляющим обмоткам 27,28j 29, 30, 31 магнитного усилителя 12 подключены выход сельсина-датчика 4 длины подъемного каната и опорное напряжение через диод 32, якорные зажимы двигателя додъема 22, якорные зажимы двигателя тяги 19, выход сель сина-датчика 1 ;у1ины тягового каната и опорное напряжение через диод 33, источник постоянного сигнала, соотве ствукнцего минимально допустимому при лижению ковша к стреле. Работает устройство следующим образом. С помощью усилителя 14 осуществляется управление электроприводом тяги по положению ковша относительно блоков наводки, усилителя 13 управление электроприводом подъема по положению ковша относительно головных блоков, усилителя 12 - управление .электроприводами подъема и тяги по положению ковша относительно стрелы. Для обеспечения самоконтроля и повышения надежности выходные сигналы с магнитного усилителя 12 системы ограничения приближения ковша к стреле подаются через рабочие.обмотки магнитHbix усилителей систем ограничения приближения ковша к блокам головным и наводк на входные обмотки сельсинных командоаппаратов. Сигнал с сельсина-датчика 3, пропропорциональный сумме длин подъемного и тягового каната, подается на управляющую обмотку 9 и действует в сторону увеличения тока нагрузки маглитного усилителя 12. Сигналы, пропорциональные скорости изменения длин подъемного и тягового канатов, подаются на обмотки 28, 29 и при уменьшении длин канатов действуют в сторону уменьшения тока нагрузки магнитного усилителя 12, обеспечивая регулирование устаьки срабатывания системы ограничения приближения ковша к стреле пропорционально скорости уменьшения суммы длин канатов. Поскольку граничная кривая положения ковша, соответствующая постоянному значению суммы длин канатов, у краев стрелы отклоняется от требуемой, для обеспечения их совпадения в этих зонах на управляющие обмотки 27 и 30 через диоды 32,33 подаются сигналы, пропорциональные разности опорных напряжений и напряжений, снимаемых с сельсинов-датчиков длин подъемного и тягового канатов (при малых значениях этих длин). Это обеспечивает снижение сигналаj соответствующего минимально допустимому приближению ковша к стреле, пропорционально уменьшению длин подъемного и тягового канатов в пределах длин этих канатов, равных примерно 1/4-1/3 длины стрелы, в результате чего обеспечивается практически полное совпадение действительной и требуемой границ приближения ковша к стреле. Если текущая сумма длин канатов больше минимально допустимой длины, на выходе магнитного усилителя 12 есть выходное напряжение, которое через рабочие обмотки магнитных усилителей 13 и 14 подается на обмотки питания сельсинных командоаппаратов 17, 20. В случае уменьшения суммы длин канатов до величины, равной минимально допустимому приближению ковша к стреле, выходное напряжение магнитного усилителя 12 уменьшается /практически до нуля. Вместе с тем уменьшается до нуля выходной сигнал магнитных усилителей 13 и 14 и сель
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ КОВША И ДЛИНЫ КАНАТОВ ДРАГЛАЙНА | 1963 |
|
SU215807A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1984 |
|
SU1232750A1 |
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Способ взаимосвязанного управления электроприводами подъема и тяги драглайна | 1971 |
|
SU771833A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
