Известны устройства для автоматического управления положением ковша относительно стрелы и блоков драглайпа. Они содержат бесконтактные сельсины-датчики длин тягового и подъемного канатов и блок усиления, включенный .на входы возбудителей генераторов подъемного и тягового приводов, выполненных но системе генератор - двигатель.
Предлагаемое устройство отличается тем, что блок усиления устройства состоит из трех однотактных млгпитных усилителей. К управляющим обмоткам одного из них подключены выход датчика длины подъемного каната и зажимы якоря двигателя подъема. К обмоткам другого - выход датчика длины тягового каната и зажимы якоря двигателя тяги. К обмоткам третьего усилителя, включенного в цепь управления положением ковша относительно стрелы,- выход датчика суммы длин канатов и якорные зажимы обоих двигателей, причем выход первого усилителя включен на вход возбудителя генератора привода подъема, а выходы второго и третьего усилителей - на вход возбудителя генератора привода тяги. К одной из унравляюш;их обмоток магнитного усилителя, включенного в цепь управления положением ковша относительно стрелы, подключен выход диодного логического элемента, на два входа которого включены выходы датчиков длин подъемного и тягового канатов.
Кроме того, в пред.магаемом устройстве применены два донолр нтельных сельсина - датчика суммы длин канатов, включенные последовательно по схеме сложення углов поворота нх роторов образуюш,ие канал точного отсчета.
Это позволяет обеспечить заш,иту стрелы и блоков драглайна от ударов ковша и динамических перегрузок, повышает маиевренность и производительность драглайна. Кроме того, такое выполнение предлагаемого устройства нозволяет увеличить рабочую зону траекторий движения KOBOja и повысить точность управления.
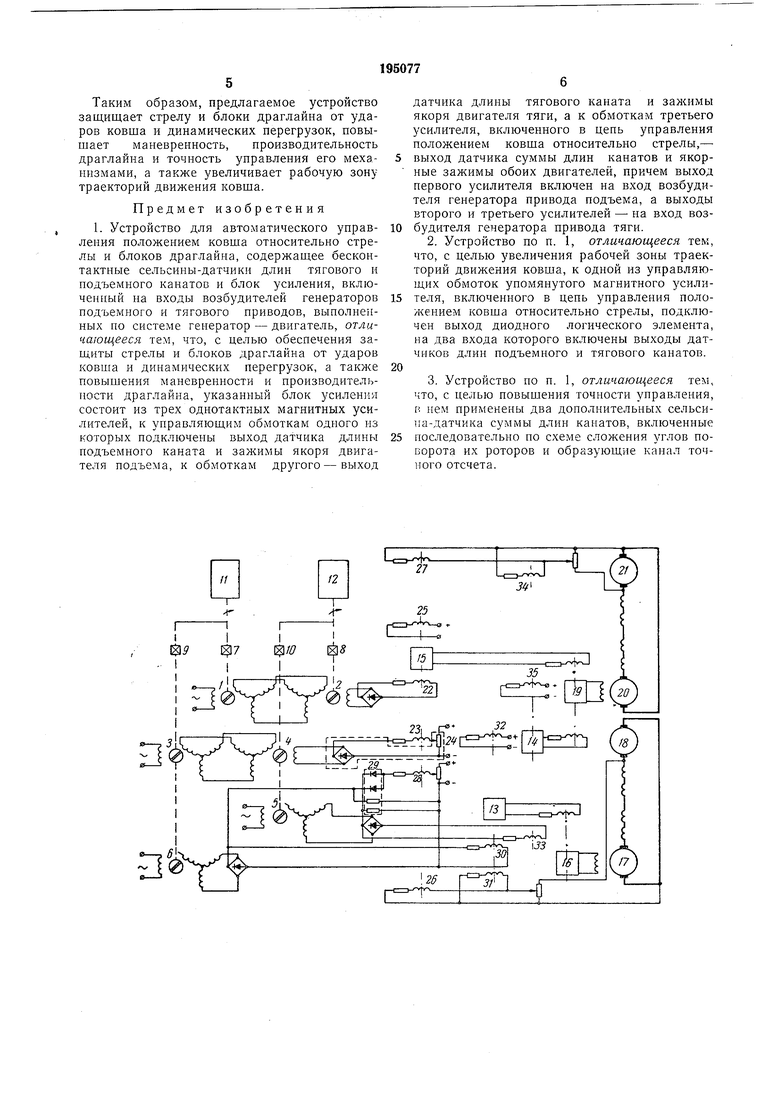
На чертеже изображена прииципиальная схема предлагаемого устройства.
Бесконтактные сельсины-датчики /, 2, 3, 4, 5 1 6 измерения длин канатов и их суммы соединены через понижающие редукторы 7, 8, 9 и 10 с валами подъемной //и тяговой 12 лебедок, углы поворота которых пропорциональны изменению длин канатов.
Сельсины 3 и 4, включенные последовательно по схеме су.ммирования углов поворота их роторов, образуют канал грубого измерения суммы длин подъемного и тягового канатов, а аналогично включенные сельсины / и 2 - канал точного отсчета. Передаточное отношение редукторов 7 и 5 в несколько раз меньше, чем у редукторов 9 и 10, благодаря этому увеличивается то.чность. ..измерения суммы длин канатов сельсинами / и 2 и уменьшается влияние зазОров Е механических передачах на точность измерения.
Формировйние сигналов управления обеспечивается тремя - однотактными магнитными усилителями 13, 14 и 15. Выход усилителя 13 подключен к входу возбудителя 16 генератора 17 подъема, питающего подъемный двигатель 18. Выходы усилителей 14 и 15 подключены к входу возбудителя 19 генератора 20 тяги, питающего тяговый двигатель 21. С помощью усилителя 13 осуществляется управление положением ковща относительно блоков драглайна, усилителя М - управление положением ковша относительио тяговых блоков, а с помощью усилителя 15 - относительио стрелы драглайиа.
Выходы сельсинов 2 и 4 каналов точного и грубого измерения суммы длин канатов подключены к управляющим обмоткам 22 и 23 однотактного магнитного усилителя 15. Ампер-витки обмоток направлены в сторону уменьшения выходного сигнала усилителя. Поэтому при большой сумме длин канатов сигнал на выходе усилителя 15 отсутствует. При уменьшении суммы длин канатов (т. е. при приближении ковща к стреле) выходное напряжение сельсина 4 становится меньще опорного напряжения с потенциометра 24, и ток по обмотке 23 протекать не будет. При дальпейщем уменьшена- суммы длин канатов выходной сигнал сельсина 2 станет лЕеньше уставки, определяемой ампер-витками обмотки 25 смещения, и на выходе усилителя 15 появится сигнал, управляющий приводом тяги таким образом, чтобы дальр1ейшее уменьшение суммы длин канатов и приближение ковша к стреле прекратилось. Поскольку нроцесс управления положением ковша относительно стрелы не оказывает влияния на работу привода подъема, от скорости которого зависит время подъема и опускапия ковша, система не ограничивает екорости выполнения рабочего цикла драглайиа. Это обеспечивает максимальную ироизводительность экскаватора.
К управляющим обмоткам 26 и 27 подключены зажимы якорей двигателей подъема 18 и тяги 21 так, что при уменьшении суммы длин канатов их ампер-витки направлены в сторону увеличения выходного сигнала однотактного усилителя 15. Чем выше скорость уменьшения суммы длин канатов, тем раньше начинает действовать система управления положепием ковша относительно стрелы. Однако, независимо от начальных скоростей приводов после прекращения приближения ковша к стреле, алгебраическая сумма сигналов, пропорциональных скоростям приводов подъема и тяги, будет равна нулю, а положение ковша будет определяться минимально допустимой суммой длии канатов. При движении ковша вдоль стрелы по любой траектории ниже кривой, соответствующей минимально допустимой сумме длии канатов, устройство не будет вмещиваться в работу приводов.
Управляющие обмотки 26 и 27 обеспечивают также стабилизацию системы регулироваиия и улучшение качества переходных процессов в ней, поскольку осуществляют во время работы системы ввод отрицательной обратной связи ио скорости изменения суммы длии канатов.
Кривая допустимого приближения ковша к стреле представляет собой эллипс, соответствующий неизменной минимальной сумме длин канатов, что ограничивает у подъемных и тяговых блоков зону возможных траекторий движения ковща.
Для устранения этого недостатка на управляющую обмотку 28 магнитного усилителя 15 подключен диодный логический элемент 29. К его входам подключеиы выходы сельсииовдатчиков длин подъемного и тягового канатов. Это обеспечивает снижение сигнала, соответствующего минимально допустимому приближению ковща к стреле, пропорционально уменьщению длин подъемного и тягового каиатов в пределах длин этих канатов, равных примерно 1/4-1/3 длины стрелы. Таким образом, кривая минимально допустимого приближения ковща к стреле лежит полностью вне рабочей зоны.
К управляющим обмоткам 30, 31 и 32 однотактиого магнитного усилителя 13 подключены выход датчика длины подъемного каната, зажимы якоря двигателя 18 подъема и источник гюстояиного сигнала, соответствующего минимально допустимому расстояиию ковща от по,а,ъемных блоков.
Ана.логично к управляющим обмоткам 33, 34, 35 однотактного магнитного усилителя/подключены выход сельсина-датчика длины тягового каната, якорные зажимы двигателя 21 тяги и источиик постоянного сигнала, соответствующего минимально допустимому приближению ковша к тяговым блокам.
Управляющие обмотки 31 и 34 осуществляют регзлирование уставок начала действия систем управления положением ковща относительно блоков в функции скорости уменьшения длииы подъемного или тягового канатов. Это обеспечивает возможность подтягиваиия ковша к блокам вплоть до минимально допустимого расстояния независимо от начальных скоростей приводов, что способствует получению максимальной маневренности драглайна. Одновременно обмотки 31 и 34 стабилизируют систему регулирования введением отрицательной обратной связи по скорости изменения длины соответствующего каната.
Предлагаемое устройство включает в себя замкнутые системы позиционного регулирования, что исключает опускание ковша под действием собственного веса и усилий в канатах после начала работы (например, систем управления положением ковша относительно стрелы и подъемных блоков).
Таким образом, предлагаемое устройство защищает стрелу и блоки драглайна от ударов ковша и динамических перегрузок, повышает маневренность, производительность драглайна и точность управления его механизмами, а также увеличивает рабочую зону траекторий движения ковша.
Предмет изобретения
1. Устройство для автоматического управления положением ковша относительно стрелы и блоков драглайна, содержащее бесконтактные сельсины-датчики длин тягового и подъемного канатов и блок усиления, включенный на входы возбудителей генераторов подъемного и тягового приводов, выполненных но системе генератор - двигатель, отличающееся тем, что, с целью обеспечения защиты стрелы и блоков драглайна от ударов ковша и динамических иерегрузок, а также повышения маневренности и производительности драглайна, указанный блок усиления состоит нз трех однотактных магнитных усилителей, к унравляющим обмоткам одного из которых нодключеиы выход датчика длины нодъемного каната и зажимы якоря двигателя подъема, к обмоткам другого-выход
датчика длины тягового каната и зажимы якоря двигателя тягн, а к обмоткам третьего усилителя, включенного в цепь управления положением ковша относительно стрелы,-
выход датчика суммы длин канатов и якорные зажимы обоих двигателей, причем выход первого усилителя включен на вход возбудителя генератора привода подъема, а выходы второго и третьего усилителей - на вход возбудителя генератора привода тяги.
2.Устройство по п. 1, отличающееся тем, что, с целью увеличения рабочей зоны траекторий движения ковша, к одной из управляющих обмоток упомянутого магнитного усилителя, включенного в цепь управления положением ковша относительно стрелы, подключен выход диодного логического элемента, на два входа которого включены выходы датчиков длин подъемного и тягового канатов.
3.Устройство но п. 1, отличающееся тем, что, с целью новышения точности уиравления, нем применены два дополнительных сельсипа-датчика суммы длин канатов, включенные
последовательно по схеме сложения углов поворота их роторов и образующие канал точного отсчета.