1 .12
Изобретение относится к автоматизации технологических процессов и может найти применение для управления виброзагрузочными устройствами, работающими в составе гибких автома- тизированных систем.
Целью изобретения является достижение оптимального режима регулирования .
На фиг. 1 представлена функцио- нальная схема устройства; на фиг. 2- схема блока управления; на фиг. 3 - алгоритм работы устройства.
Устройство для программного управления виброзагрузочным бункером соде жит чашу 1, жестко связанную с якорем 2 электромагнита, обмотка возбуждения 3 которого подключена к сети питания через тиристор 4, фазовращатель 5, датчик наличия детали 6, , соединенный с входом усилителя 7, блок управления 8, выходы которого связаны с цифроаналоговым преобразователем 9, соединенным с управляемым одновибратором 10, дифференцирующую цепь 11, подключенную к вьшрямите- лю 12.
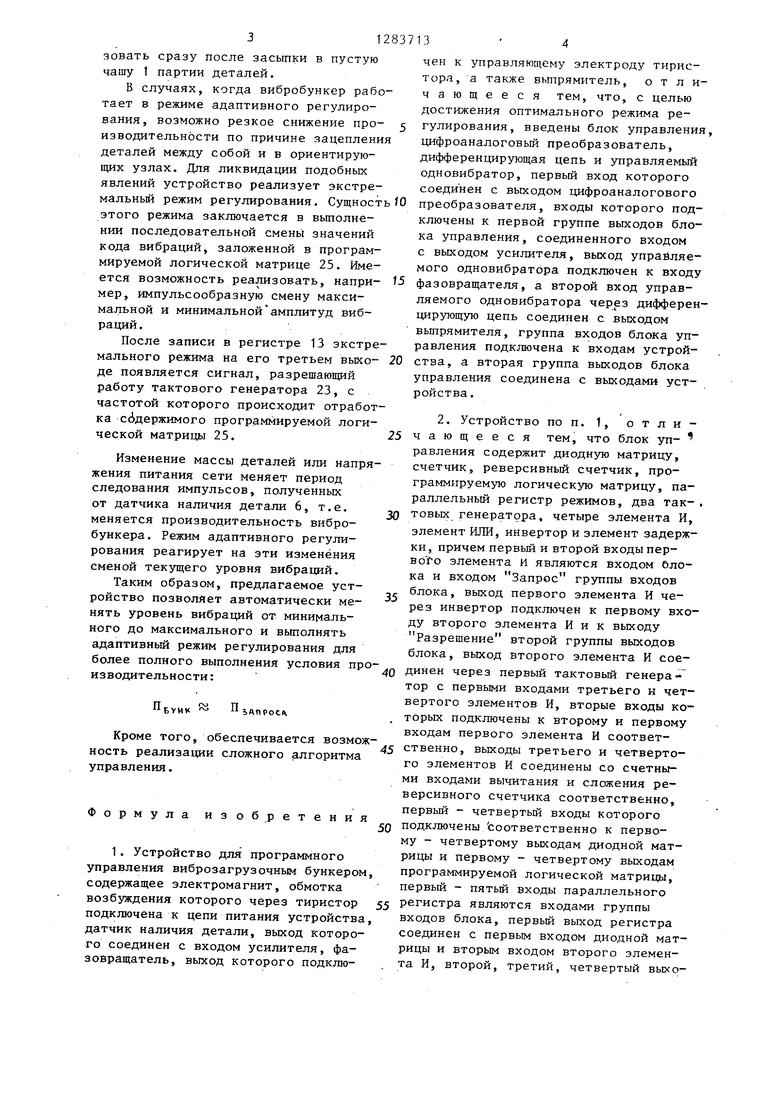
Блок управления 8 (фиг. 2) содержит параллельньй регистр 13, реверсивный счетчик 14, первьй элемент И 15, инвертор 16, второй, третий и четвертый элементы И 17-19, элемент ИЛИ 20, первый тактирующий генератор 21, диодную матрицу 22, второй тактирующий генератор 23, счетчик 24, программируемую логическую матрицу 25, элемент задержки 26.
Устройство для программного управления виброзагрузочным бункером ра- ботает следующим образом.
В чашу 1 загружается порция деталей и устройство подключается к сети питающего напряжения.
От систем управления верхнего уровня (не показаны) на группу входов блока управления 8 поступает информация о режиме работы. Устройство может работать в одном из следующих режимов: адаптивном, максимальном, минимальном и экстремальном. На вход Выбор режима блока управления 8 подается сигнал О выбора режима который поступает в параллельный регистр 13 и разрешает запись информа- ции о выбранном режиме работы.
При работе в адаптивном режиме на первом выходе параллельного регистра . 13 появляется уровень логической 1
5
71
5
0
5 Q 5
0
32
на остальных выходах логический О. Уровень логическая 1 поступает на первый вход диодной матрицы 22 и второй вход второго элемента И 17. На выходах диодной матрицы 22 появляе1ся двоичный код, соответствующий среднему уровню вибрап 1Й и поступает на 1-4 входы реверсивного счетчика 14. Сигнал Выбор режима через второй элемент ИЛИ 20 и элемент задержки 26 воздействует на V-вход реверсивного счетчика 14 и записывает в него код среднего уровня вибраций.
С выходов реверсивного счетчика 14 код через цифроаналоговый преобразователь 9, управляемьй одновибра- тор 10, фазовращатель 5 и тиристор 4 воздействует на обмотку возбуждения 3 и вызывает колебания, т.е. работу виброзагрузочного устройства со средней производительностью.
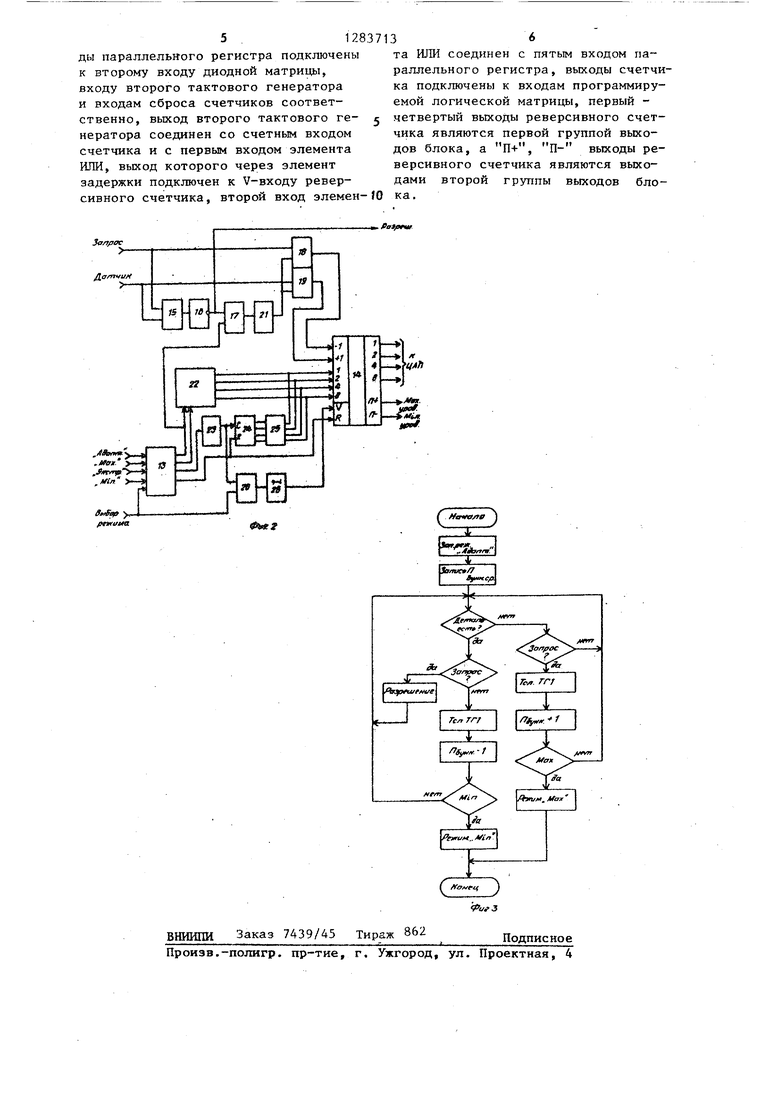
Далее сигнчл от датчика наличия детали 6 о результатах Виброзагрузки и сигнал Запрос поступают на входы Датчик и Запрос блока управления 8 и взаимодействуют через первьй элемент И 15, инвертор 16, элементы И 17-19 и первый тактирующий генератор 21, затем поступают на .счетные входы -1 и +1 реверсивного счетчика 14. При этом увеличивается или уменьшается амплитуда колебаний чаши 1 с деталями, как это изображено в алгоритме адаптивного управления на фиг. 3.
Первый тактирующий генератор 21 при несовпадении сигналов Датчик и Запрос вырабатьшает последовательность прямоугольных импульсов, период следования которых установлен равным среднему ритму работы связанного с бункером оборудования, забирающего из него детали.
При совпадении сигналов Запрос и Наличие детали вырабатывается сигнал Разрешение.
При минимальном режиме работы отсутствуют колебания виброзагрузочного устройства. Этот режим действует в случаях, когда связанное с вибробункером оборудование, например про- мышленньй робот в течение определенного времени не запрашивает детали.
В максимальном режиме производительность виброзагрузочного устройства максимальна. Этот режим можно использовать сразу после засыпки в пустую чашу 1 партии деталей.
В случаях, когда вибробункер работает в режиме адаптивного регулирования, возможно резкое снижение про- изводительности по причине зацеплени деталей между собой и в ориентирую- 1ЦИХ узлах. Для ликвидации подобных явлений устройство реализует экстре- мальньй режим регулирования. Сущност этого режима заключается в вьшолне- нии последовательной смены значений кода вибраций, заложенной в программируемой логической матрице 25. Имеется возможность реализовать, напри- мер, импульсообразную смену максимальной и минимальной амплитуд вибраций.
После записи в регистре 13 экстремального режима на его третьем выхо- де появляется сигнал, разрешающий работу тактового генератора 23, с частотой которого происходит отработка содержимого программируемой логической матрицы 25.
Изменение массы деталей или напряжения питания сети меняет период следования импульсов, полученных от датчика наличия детали 6, т.е. меняется производительность вибробункера. Режим адаптивного регулирования реагирует на эти изменения сменой текущего уровня вибраций.
Таким образом, предлагаемое устройство позволяет автоматически ме- нять уровень вибраций от минимального до максимального и вьшолнять адаптивный режим регулирования для более полного выполнения условия производительности:
БУНК
п
,ДПРОС1
Кроме того, обеспечивается возможность реализации сложного алгоритма управления.
Формула изобретения
1. Устройство для программного управления виброзагрузочным бункером, содержащее электромагнит, обмотка возбуждения которого через тиристор 55 подключена к цепи питания устройства, датчик наличия детали, выход которого соединен с входом усилителя, фазовращатель, выход которого подклю50 5
0
0
0
5
0
5
чен к управляющему электроду тиристора, а также выпрямитель, отличающееся тем, что, с целью достижения оптимального режима регулирования, введены блок управления, цифроаналоговый преобразователь, дифференцирующая цепь и управляемый одновибратор, первьй вход которого соединен с выходом цифроаналогового преобразователя, входы которого подключены к первой группе выходов блока управления, соединенного входом с выходом усилителя, выход управляемого одновибратора подключен к входу фазовращателя, а второй вход управляемого одновибратора через дифференцирующую цепь соединен с выходом выпрямителя, группа входов блока управления подключена к входам устройства, а вторая группа выходов блока управления соединена с выходами устройства .
2. Устройство по п. 1, отличающееся тем, что блок уп- равления содержит диодную матрицу, счетчик, реверсивный счетчик, программируемую логическую матрицу, параллельный регистр режимов, два так- , товых генератора, четыре элемента И, элемент ИЛИ, инвертор и элемент задержки, причем первый и второй входы пер- Bofo элемента И являются входом блока и входом Запрос группы входов блока, выход первого элемента И через инвертор подключен к первому входу второго элемента И и к выходу Разрешение второй группы выходов блока, выход второго элемента И соединен через первый тактовый генератор с первыми входами третьего и четвертого элементов И, вторые входы которых подключены к второму и первому входам первого элемента И соответственно, выходы третьего и четвертого элементов И соединены со счетными входами вычитания и сложения реверсивного счетчика соответственно, первый - четвертый входы которого подключены соответственно к первому - четвертому выходам диодной матрицы и первому - четвертому выходам программируемой логической матрицы, первый - пятьм входы параллельного регистра являются входами группы входов блока, первый выход регистра соединен с первым входом диодной матрицы и вторым входом второго элемента И, второй, третий, четвертый выходы параллелыгого регистра подключены к второму входу диодной матрицы, входу второго тактового генератора и входам сброса счетчиков соответственно, выход второго тактового генератора соединен со счетным входом счетчика и с первым входом элемента ИЛИ, выход которого через элемент задержки подключен к V-входу реверсивного счетчика, второй вход элемен
0
та ИЛИ соединен с пятым входом параллельного регистра, выходы счетчика подключены к входам программируемой логической матрицы, первый - четвертый выходы реверсивного счетчика являются первой группой выходов блока, а П+, П- выходы реверсивного счетчика являются выходами второй группы выходов блока.
Запрос
afrvufl
А/ ) ftfiftauoL
fal/anu
,- 1
ВНИИПИ Заказ 7439/45 Тираж 862
Подписное
..-.. , 1 J , -- т - J |1-4 ----- -
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
1-4 ----- -
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обнаружения запросов прерывания высшего и низшего приоритетов | 1984 |
|
SU1201839A1 |
| УСТРОЙСТВО АДАПТИВНОЙ КОММУТАЦИИ СООБЩЕНИЙ | 2009 |
|
RU2416121C2 |
| Электропривод | 1987 |
|
SU1476584A1 |
| ИМИТАТОР СИГНАЛОВ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ МАГНИТНЫХ ГОЛОВОК ОТНОСИТЕЛЬНО МАГНИТНЫХ ДИСКОВ | 1991 |
|
RU2017239C1 |
| Устройство тастатурного набора номера | 1980 |
|
SU921116A1 |
| Преобразователь унитарного кода в сдвиг фазы импульсного сигнала | 1984 |
|
SU1229962A1 |
| Электромагнитный расходомер | 1987 |
|
SU1578481A1 |
| Устройство для кодирования аналоговой информации | 1986 |
|
SU1338074A1 |
| Устройство воспроизведения изменяющегося магнитного поля | 1986 |
|
SU1397863A1 |
| Умножитель частоты | 1986 |
|
SU1385230A1 |
Изобретение относится к автоматизации технологических процессов и позволяет достичь оптимальный режим регулирования. Для этого в устройство введены блок управления 8,цифроана- логовый преобразователь 9,одновибратор 10,дифференцирующая цепь 11.Устройство может работать в следующих режимах: адаптивном максимальном, минимальном и экстремальном. Изменение массы деталей в чаше 1 или напряжения сети меняет период следования импульсов, полученных от датчика наличия детали 6. Режим адаптивного регулирования реагирует на эти изменения сменой текущего уровня вибраций. 1 з.п. ф-лы, 3 ил. 1чр 00 со со
| Вибрационное бункерное загрузочное устройство | 1978 |
|
SU751733A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Электровибрационное устройство к загрузочному бункеру | 1979 |
|
SU772805A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
