123
2, Манипулятор по п. 1, отличающийся тем, что, с целью повышения производительности, на втором звене каждого исполнительного органа установлены подпружиненные один относительно другого основной и дополнительный рабочие органы, выполнен
Изобретение относится к машиностроению, а именно к манипуляторам для автоматизации вспомогательных операций на машиностроительных и металлургических предприятиях.
Цель изобретения - расширение функциональных возможностей путем обеспечения захвата за торцы длинномерных изделий и повышение производительности путем установки на исполнительном органе двух захватов.
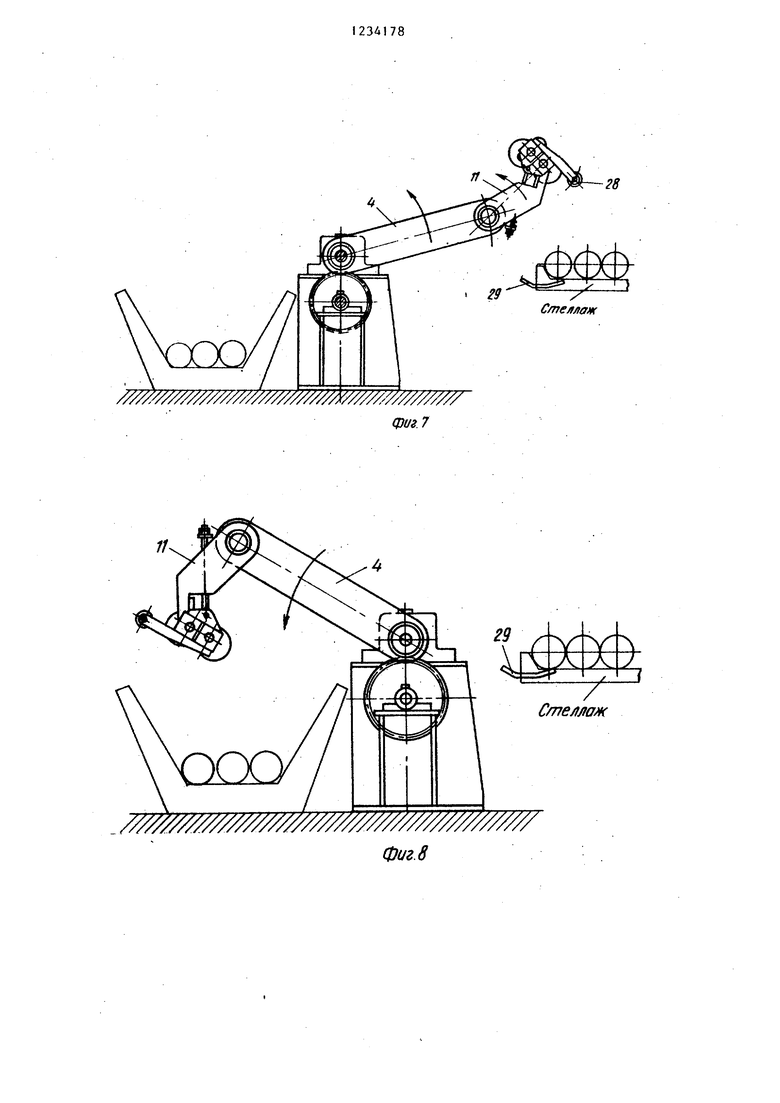
На фиг. 1 представлена кинематическая схема предлагаемого манипулятора; на фиг. 2 - разрез А-А на фиг, i; на фиг, 3 - узел 1 на фиг,1 (ведомое звено, вид сверху); на фиг. 4 - вид Б на г, 3; на фиг.5 - разрез В-В на фиг. 3; на фиг. 6 - кинематическая схема узла I на фиг, 1J на фиг. 7 - положение рычагов манипулятора после отхода от исходного положения; на фиг. 8 - положение рычагов манипулятора при подходе к кармануJ на фиг. 9 - положение рычагов манипулятора при укладке в карман четвертой и пятой труб; на фиг, 10 - положение рычагов манипулятора при укладке в карман шестой и седьмой труб.
Манипулятор состоит из двух исполнительных органов, один из которых установлен неподвижно на орнова- нии, а второй - с возможностью перемещения вдоль валов. Такая конструкция необходима для приема и обработки изделий различной длины. Установка манипуляторов включает стойки 1, на которых смонтированы опоры 2 вала 3. На последнем жестко закреплено звено 4 (большой рычаг). Звено 4 выполнено коробчатым с опорами 5, между которыми установлена паразитная шестерня 6, эыполненная заодно
ные в виде параллельно расположенных пневмоцилиндров, на штоках которых установлены конические насадки, причем один из пневмоцилиндров закреплен на этом звене жестко, а другой - с возможностью поворота относительно; первого.
со звездочкой 7 и свободно сидящая на валу 3. Звездочка 7 связана цепью 8 с другой звездочкой 9, закрепленной на валу 10. На консоли вала 10
5 жестко закреплено ведомое звено (малый рычаг) 11 со схватами. Звено 11 снабжено опорой 12 скольжения, в которой закреплена развитая передняя крьшиса 13 пневмоцилиндра 14. На
0 шток 15 пневматического цилиндра 14 насажена втулка 16, выполненная из пластмассы или податливого материала для исключения порчи внутренней поверхности трубы, в частности резь5 бы. На передней крышке пневмоцилиндра закреплен ограничитель 17, обеспечивающий возможность полного извлечения штока из трубы.
Рядом, параллельно с пневматичес0 КИМ цилиндром 14, установлен такой же пневмоцилиндр 18. Его передняя крьшоса 19 соединена жестко с передней крьшпсой 13 пневматического цилиндра 14 при ПОМСЯ1И планок 20 и 21
5 с отростками. Между планками 20 на оси 22 закреплена тяга 23, на которую надета пружина 24, зафиксированная между опорой 25 и шайбой 26. Между отростками планок 21 на оси 27
0 (установлен ролик 28, взаимодействую-, щий с копиром 29. В качестве привода вала 3 использован электропривод 30, Вращение на звено 11 передается от злектропривода 31 через
5 вал 32 шестерне 33, находящейся в зацеплении с паразитной шестерней 6
Второй манипулятор установки по конструкции такой же, как и указанный основной манипулятор, только
0 выполнен в зеркальном исполнении и имеет возможность перемещаться вдоль вала при изменении длины труб от отдельного привода 34. Для обеспече31
иия перемещения звена 35 (при изменении длины трубы) валы 36 и 37 между соответствующими опорами 38, 39 и 40, 41 выполнены шлицевыми. Соответствующую форму отверстий имеет ше Стерня 42 и блок паразитная шестерня звездочка 43.
Манипулятор работает следующим образом.
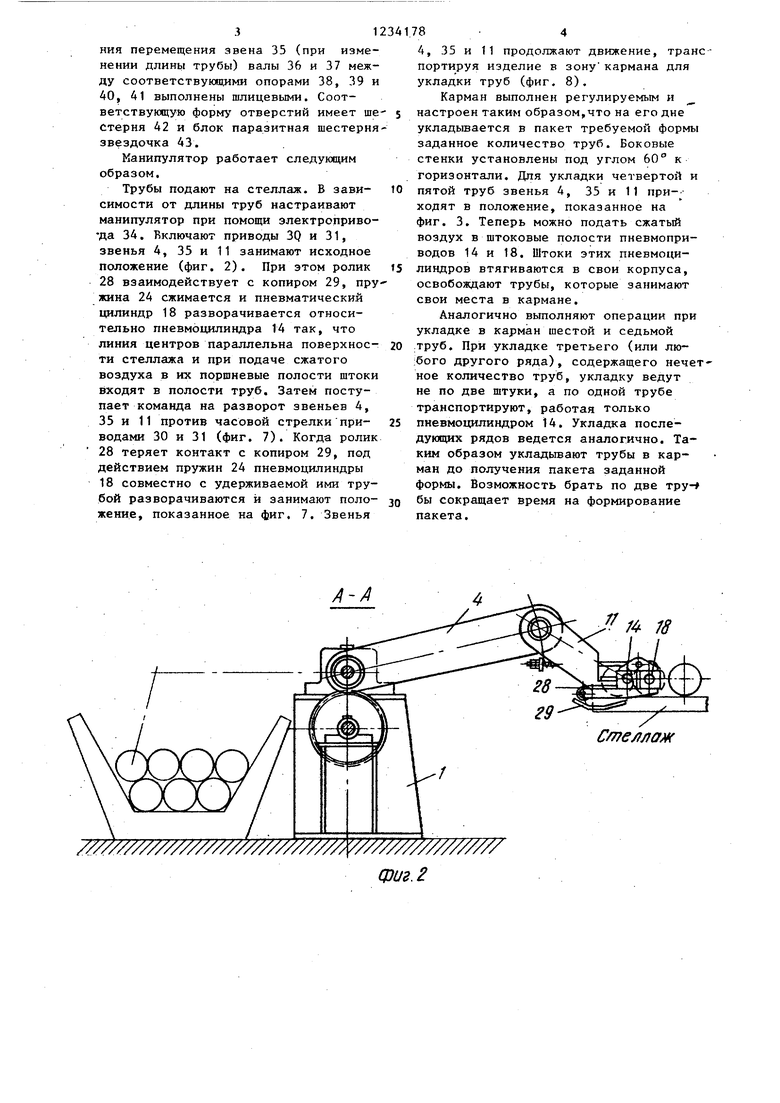
Трубы подают на стеллаж. В зави- симости от длины труб настраивают манипулятор при помощи электроприво- да 34. включают приводы 30 и 31, звенья 4, 35 и 11 занимают исходное положение (фиг. 2). При этом ролик 28 взаимодействует с копиром 29, пру жина 24 сжимается и пневматический цилиндр 18 разворачивается относительно пневмоцилиндра 14 так, что линия центров параллельна поверхнос- ти стеллажа и при подаче сжатого воздуха в их поршневые полости штоки входят в полости труб. Затем поступает команда на разворот звеньев 4, 35 и 11 против часовой стрелки при- водами 30 и 31 (фиг. 7). Когда ролик 28 теряет контакт с копиром 29, под действием пружин 24 пневмоцилиндры 18 совместно с удерживаемой ими трубой разворачиваются и занимают поло- жение, показанное на фиг, 7. Звенья
78 4
4, 35 и 11 продолжают движение, тран портируя изделие в зону кармана для укладки труб (фиг. 8).
Карман выполнен регулируемым и настроен таким образом,что на его дне укладывается в пакет требуемой формы заданное количество труб. Боковые стенки установлены под углом 60° к горизонтали. Для укладки четвертой и пятой труб звенья 4, 35 и 11 при- - ходят в положение, показанное на фиг. 3. Теперь можно подать сжатый воздух в штоковые полости пневмоприводов 14 и 18. Штоки этих пневмоци- линдров втягиваются в свои корпуса, освобождают трубы, которые занимают свои места в кармане.
Аналогично выполняют операции при укладке в карман шестой и седьмой труб. При укладке третьего (или лю- ;бого другого ряда), содержащего неченое количество труб, укладку ведут не по две штуки, а по одной трубе транспортируют, работая только пневмоцилиндром 14. Укладка последующих рядов ведется аналогично. Таким образом укладывают трубы в карман до получения пакета заданной формы. Возможность брать по две тру- бы сокращает время на формирование пакета.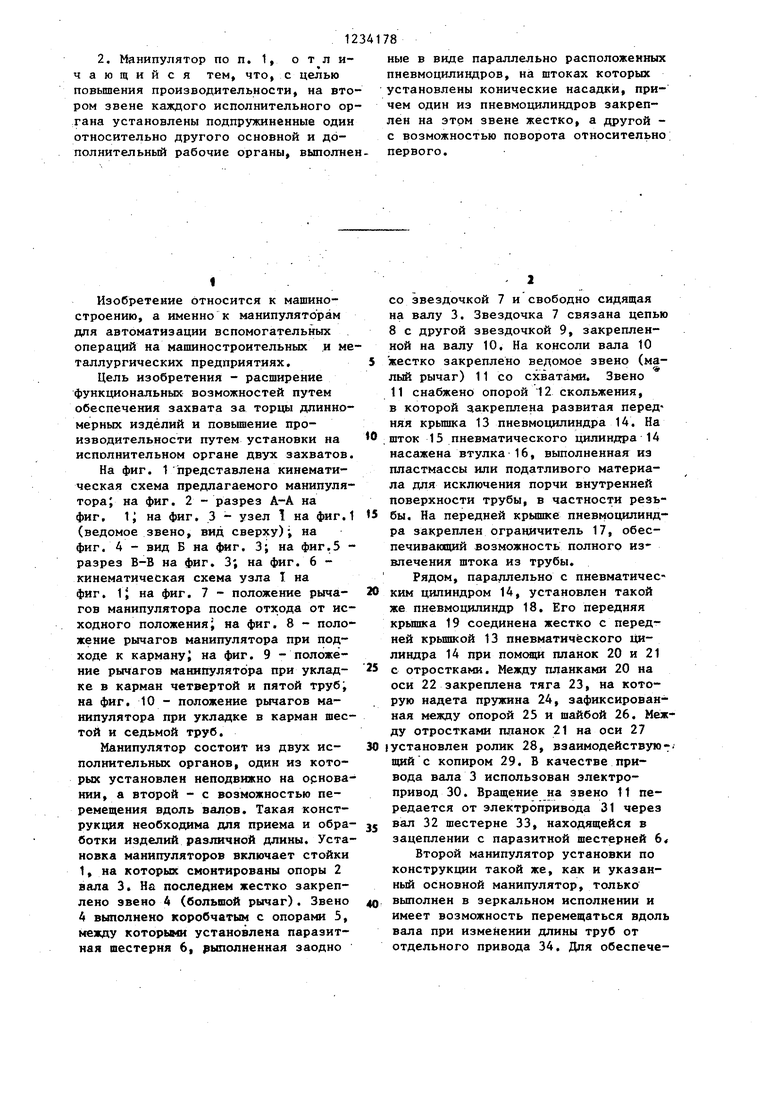
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для контактной сварки | 1978 |
|
SU764893A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| КОРОБКА ПЕРЕДАЧ САМОХОДНОЙ МАШИНЫ | 2020 |
|
RU2753023C1 |
| СПОСОБ ОСЕВОГО ВРАЩЕНИЯ И ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279940C1 |
| Устройство для распаковки пачек стержнеобразных предметов | 1981 |
|
SU1043071A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРОФИЛЬНЫХ ТРУБ | 2010 |
|
RU2450876C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2000 |
|
RU2170325C1 |



/f-x7
////////////////////////////////
фиг. 2
./4i 18
.Я 9 iff Н- //
18
1
i
I
-T,
Л
17
/jr
8t/d6
22
so.
e9
фиг A
21
фиг.6
фиг. 5
28
/////W////////////////
фиг. 7
/ С/леллаж
/////////////
фиг.8
29 Стеллаж
////////////
фиг.9
7 / 2д Сл7елла}к
М тт //////
фиг.10
Редактор С. Лисина
Составитель Ю. Вильчинский
Техред О.Сопко Корректор М, Максимишинец
Заказ 2941/18 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная, 4
| Козьфев Ю.Г | |||
| Промьппленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Насос | 1917 |
|
SU13A1 |
