Изобретение относится к области роботостроения и может быть использовано в исполнитёльнух органах роботов и манипуляторов, предназначенных для захвата и переноса деталей и узлов.
Цель изобретения - повьппение быстродействия путем сокращения времени на захват и разжим деталей разных размеров.
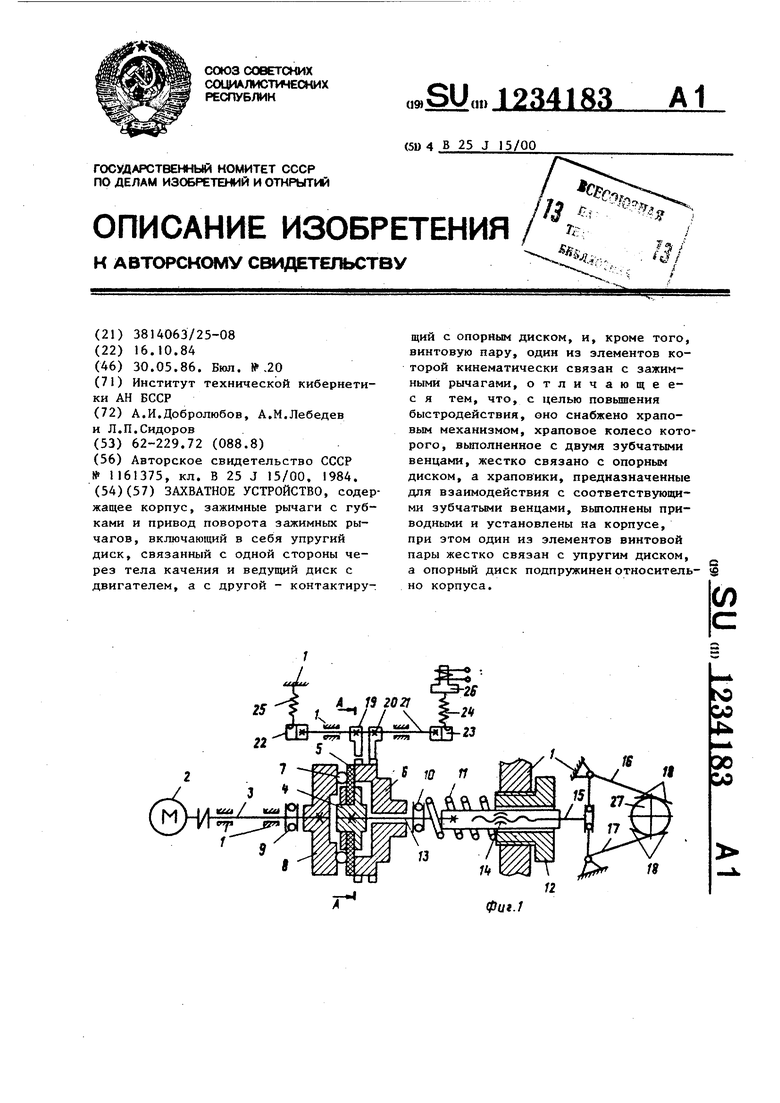
На фиг, I изображена кинематическая схема предлагаемого устройства; на фиг. 2 - сечение А-А на фиг.1.
Устройство содержит корпус 1, размещенный в нем привод 2, связанный с ведущим валом 3, редуцирующий механизм, включающий ведомое звено 4 с упругим диском 5, опорный диск с храповым колесом 6, тела 7 качения, размещенные в дорожках качения ведущего диска 8, закреплен1ного на валу 3. Подшипники качения 9 и 10 служат для восприятия осевых усилий, пружина I1 обеспечивает прижатие тел 7 качения к упругому диску 5, гайка 12 предназ- начена для регулирования сжатия пружины II. Ведомый вал 13 связан одним концом со звеном 4, а другим - с подвижной гайкой I4. Ходовой винт 15, помещенный в гайке 14, при помощи рычагов 16 и 17 кинематически связан с губками 18.
Храповой механизм содержит храповое колесо 6, сцепляющиеся с ним храповики 19 и 20, которые закреплены на оси 21. Рычаги 22 и 23, закрепленные на оси 21 с помощью прУжин 24 и 25 соответственно связаны с электромагнитом 26 и корпусом I. Захватываемая деталь обозначена позицией 27.
Устройство работает следующим образом.
При вращении привода 2 вперед, в начале, когда отсутствует усилие и . крутящий момент на валу 13, подвижные звенья 8,7,5,4,6 вращаются с одинаковой cкopiocтью, равной скорости вращения привода 2. При этом тела 7 качения остаются в неподвижном состоянии относительно упругого диска 5 Происходит быстрый подвод губок к захватываемой детали. При возраста
нии усилия зажима на губках 18 и крутящего момента на валу 13 тела 7 качения начинают катиться по упругому диску 5, вызывая его медленное вращение в направлении вращения ведущего диска 8. Храповое колесо 6 неподвижно в виду того, что храповик 19 находится в зацеплении с одним венцом храпового колеса 6. Подвижная гайка 14 вращается вместе с валом 13 и обес печивает поступательное движение винта 15 влево (фиг.1), который кинематически связан с помощью рычагов 16 и 17 с подвижньми губками 18, а последние сжимают захватываемую деталь. После захвата детали движение губок 18, винта 15 и вращение гайки 14 прекращается, но качение тел 7 по диску 5 может продолжаться, при зтом усилие захвата на губках не изменяется. Двигатель может оставаться вклшченньм, так как это не изменяет усилия зажима детали.
Для освобозвдения детали привод 2 включают в обратном направлении, одновременно с ним включается электромагнит 26, пружина 24 поворачивает через рычаг 23 ось 21, храповик 20 сцепляется с другим венцом храпового колеса 6, а храповик 19 соответственно выходит из зацепления с первым венцом храпового колеса 6. При зтом вал 13 медленно вращается в обратном направлении и движение ходового винта 15 вправо вызывает разжим закрепленной в губках 18 детали. При уменьшении усилия на губках 18 и крутящего момента на валу 13 тела 7 качения прекращают качение по упругой поверхности диска 5 и редуцируюпщй механизм (звенья 8,7,5,4,6) вращается с быстрой скоростью вращения привода 2. Происходит быстрый отвод
губок схвата в исходное положение. Подвижные губки могут быть различными по форме. Это определяется размерами и формой захватываемой детали. Привод губок может вьшолняться и в
других вариантах (как рычажно-винто- вым, так и рычажным или другими конструктивными исполнениями).
А А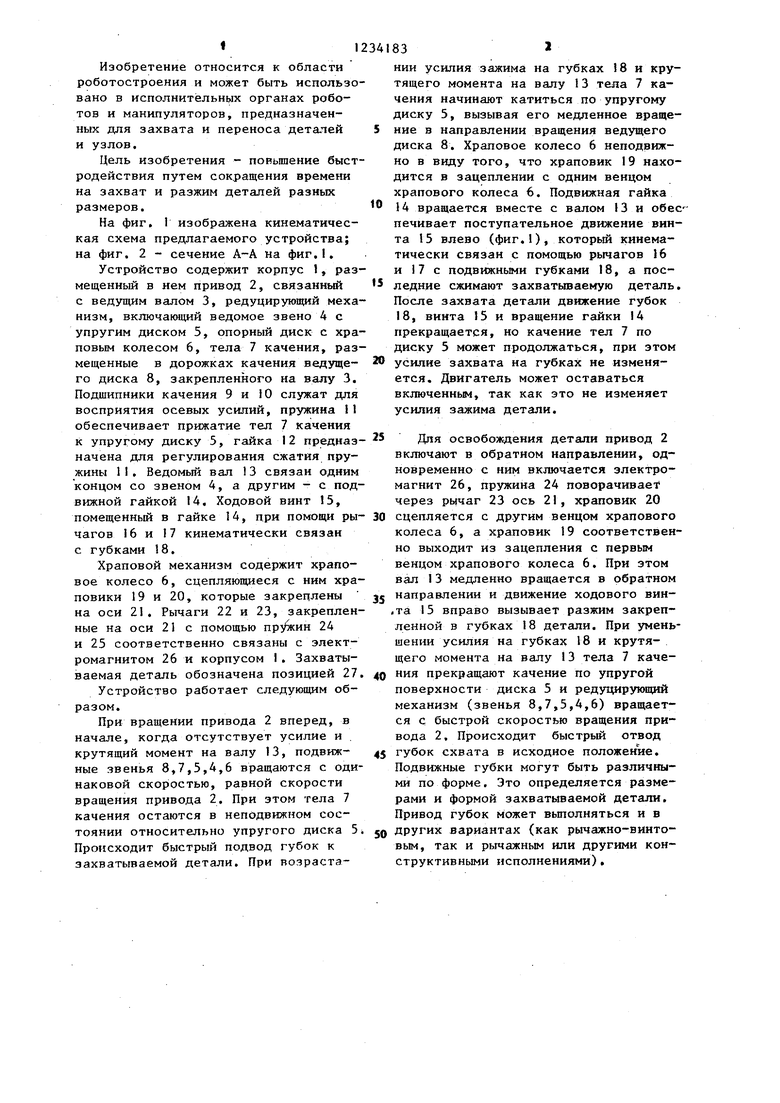
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1161375A1 |
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Сборочная головка с автопоиском | 1984 |
|
SU1227401A1 |
| Предохранительная фрикционная муфта | 1989 |
|
SU1762018A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2002 |
|
RU2289045C2 |
Редактор А,Ревии
Составитель Е.Марков Техред М.Ходанич
Заказ 2942/19 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Л 11илипенко
| Схват | 1983 |
|
SU1161375A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
