Изобретение относится к роботостроению и может быть использовано в исполнительных органах роботов и манипуляторов, предназначенных для захвата и переноса деталей.5
Цель изобретения - обеспечение стабильности усилия зажима за счет введения в механизм передачи движения от привода к губка упругого элемента.
.На чертеже схематически представ- О лен П1 едлагаемь й схват..
Подвижные губки 1 кинематически связаны винтой 2 винтовой пары с гайкой 3, установленной в корпусе 4. К торцУ гайкТ 3 одной стороной прижат 15 закреплённый в корпусе 4 упругий элемент в виде диска 5. С другой стороны упругого диска 5 расположены прижатые к нему тела 6 качения, размещенные в дорожках качения кольца 7, Последнее 20 при помощи шайбы 8 связано с ведущим валом 9 привода 10. Пружина 11 обеспечивает усилие прижима тел 6 качения к упругому диску 5.
Схват работает следующим образом. 25
При вращении вала 9 привода 10 движение чербз шайбу 8 передается кольцу 7, при этом тела 6 качения начинают катиться по упругому диску 5, к которому эти тела качения прижаты ЗО посредством кольца 7 пружиной 11.
На упругом диске 5 образуется бегущая волна деформации, вследствие чего подвижная гайка 3 получает вращение в направлении, противоположном вращению вала 9 со скоростью значительно меньшей скорости вращен вала. Величина уменьшения скорости вращения гайки 3 зависит от упругих свойств диска 5 и от силы прижима к нему тел 6 качения. Гайка 3 при своем вращении вызывает перемещение за-хватных губок 1. После захвата детали движение губок прекращается, равно как и движение винта 2 и вращение гайки 3, при этом качение тел 6 по упругому диску 5 может продолжаться, причем усилие зажима на губках остается постоянным. Привод 10 после захвата детали может оставаться либо включенным, либо выключенным и это не изменяет усили зажима. Для освобождения детали необходимо реверсировать вращение. привода. Упругий диск 5 может-быть выполнен из различных материалов (резина, полимеры, сталь; латунь и др.) в з 1висимости от т ебуемого усилия зажима и передаточного отношения. Повышение усилия зажима может осуществляться увеличением числа тел качения.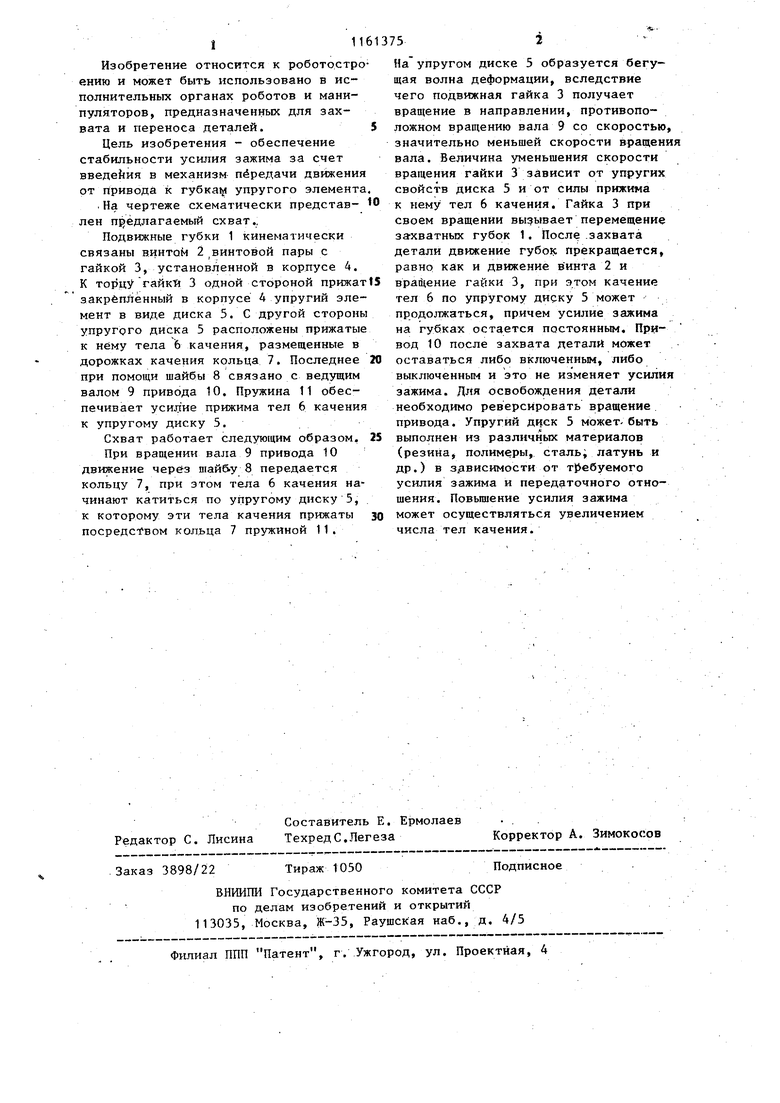
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1234183A1 |
| Схват | 1983 |
|
SU1079429A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Схват манипулятора | 1984 |
|
SU1283090A1 |
| Устройство для обвязки бухт, механизм захвата и подачи бухт и механизм подачи обвязочного материала | 1989 |
|
SU1703560A1 |
| Загрузочное устройство | 1987 |
|
SU1502247A1 |
| БЫСТРОЗАЖИМНЫЕ ТИСКИ | 2024 |
|
RU2837922C1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
СХВАТ, содержащий корпус, губки, механизм передачи движения губкам, расположенный в корпусе, и -привод, отличающийся тем, что, с целью обеспечения стабильности зажима, механизм передачи движения вьшолнен в виде упругого диска, закрепленного на корпусе, кольца, тел качения, а также винтовой пары, винт которой кинематически связан с губками, а гайка -установлена в корпусе с возможностью ее вращения и . контактирования ее торцом с одной стороны диска, при этом тела качения размещены между кольцом и диском с возможностью их контактирования с другой стороной диска к с торцовой поверхностью кольца, а последнее связано с валом привода и подпружинено относительно корпуса.
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| Л., Машиностроение, 1981, с | |||
| Способ составления поездов | 1924 |
|
SU349A1 |
| К | |||
