Изобретение относится к устройствам для управления транспортными средствами, в частности для управления колесами.нрице- пов-роспусков лесовозных автопоездов.
Цель изобретения - улушпепие маневренности автопоезда и повынюние безопасности его работы.
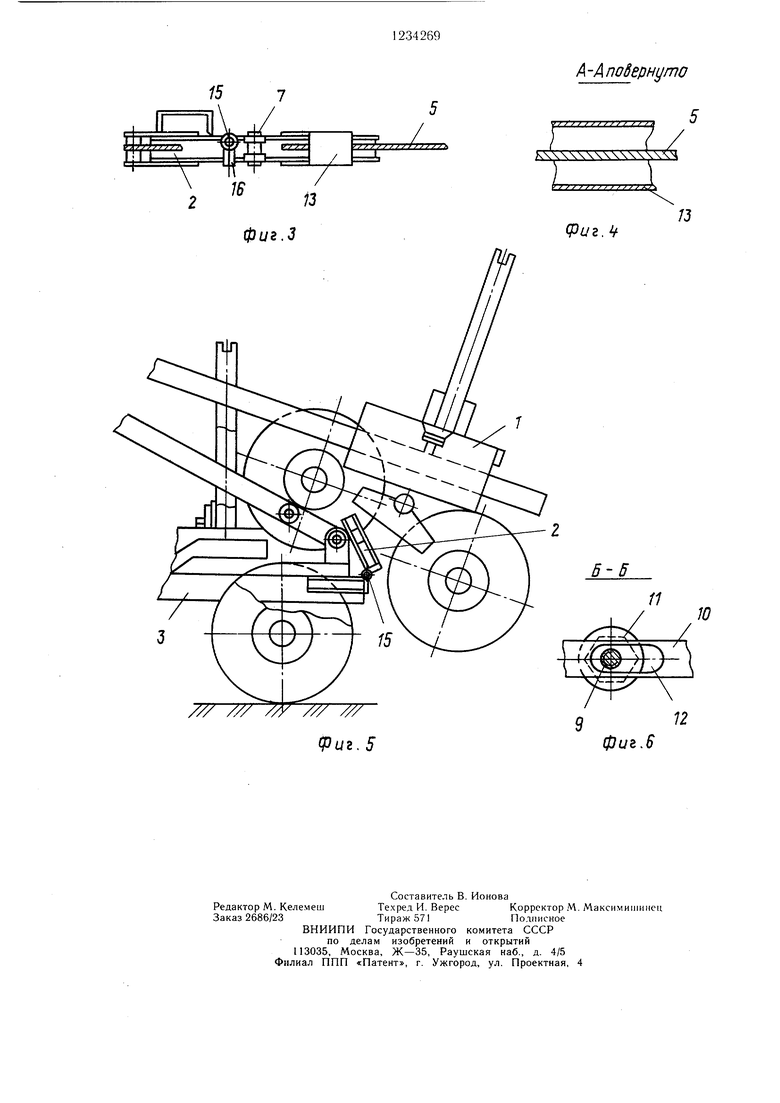
На фиг. 1 изображено предлагаемое транспортное средство, положение на повороте; на фиг. 2 - предлагаемое устройство, общий вид; на фиг. 3 - то же, вид сбоку; на фиг. 4 - разрез А-А на фиг. 2; на фиг. 5 - положение устройства при погрузке прицепного звена на тягач; на фиг. 6 - разрез Б-Б на фиг. 2.
Устройство для управления колесами прицепного звена 1 состоит из копира 2, неподвижно закреплепного па раме тягача 3. Тяговые балки 4, закрепленные на копире 2, расположены под углом к его продольной оси. Тросовый привод 5 соединяет тяговые балки 4 с прицепным звеном 1. Профильные поверхности копира 2 выполнены в виде двух рычагов 6, установленных с возможностью поворота в горизонтальной плоскости при помощи осей 7. Между собой рычаги 6 соединены растяжкой 8 и винтами 9, один из которых имеет правую, а другой - левую резьбы. Своими торцами растяжка 8 взаимодействует с ребрами 10 на копире 2 при помощи прокладок 11. Винты 9 пропущены сквозь отверстия 12 на ребрах 10. На рычагах 6 расположены ограничители 13, выполненные коробчатого типа. Противоположные от рычагов 6 поверхности 14 ограничителей 13 выполнены профильными. Тросовый привод 5 пропущен в промежутке между рычагами 6 и профильными поверхностями 14.
Для обеспечения возможности погрузки прицепного звена на раму тягача 3 копир 2 выполнен складывающимся в вертикальной плоскости. Складывание может осуществляться, например, при помощи завес 15. Для исключения поломок от действия ударных нагрузок при складывании копира 2 и поддержания его в горизонтальном положении в промежутках между завесами 15 установлены амортизирующие прокладки 16. В начальном положении при движении по прямой тросовый привод 5 не взаимодействует ни с рычагами 6, ни с профильными поверхностями 14 ограничителей 13. Величина угла поворота рычагов 6 находится в
определенном фиксированном положении относительно продольной оси копира 2 и соответствует данной базовой длине автопоезда. Фиксация рычагов 6 производится растяжкой 8 и винтами 9.
При движении на поворотах тросовый
привод 5 начинает взаимодействовать с профильной поверхностью рычагов 6, обкатываясь по ним. При этом нерабочая ветвь тросового привода 5 вступает во взаимодействие с профильной поверхностью 14 противоположного ограничителя 13 и подтягивает ее, исключая провисание нерабочей ветви. Величина подтягивания нерабочей ветви находится в функциональной зависимости от величины эксцентриситета копира 2, а поэтому поверхности 14 ограничителей 13, взаимодействующие с нерабочей ветвью, также выполнены профильными, что позволяет исключить зоны неуправляемости при выходе автопоезда из поворота.
При изменении базовой длины автопоезда водитель производит настройку величины
эксцентриситета копира 2. Настройка осуществляется путем вращения растяжки 8.
7
11
/4
Сриг. г
15
фиг. J
А-Аподерндшо
(Puz.if
П
/у//// ////7/ х Фаг. 5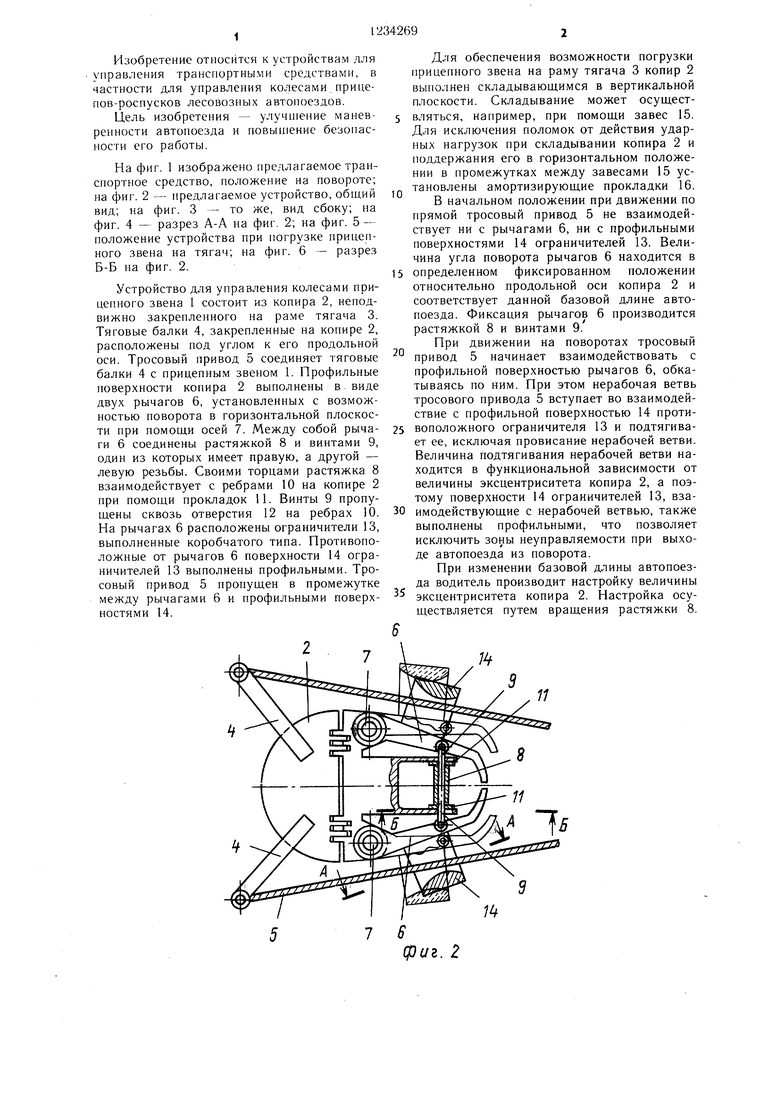
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления колесами полуприцепа | 1980 |
|
SU910485A1 |
| Автопоезд для перевозки длинномерных грузов | 1988 |
|
SU1581621A1 |
| Устройство для управления колесами прицепного звена транспортного средства | 1985 |
|
SU1475850A1 |
| Устройство для управления колесами прицепа-роспуска | 1987 |
|
SU1495193A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794781A2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 2005 |
|
RU2288847C1 |

| Устройство для управления колесами полуприцепа | 1980 |
|
SU910485A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
