2.Рука робота по п. 1, отличающаяся тем, что эталонный элемент выполнен из гибкого материала.
3.Рука робота, состоящая из двух частей, неподвижной, связанной с основанием, и подвижной, установленной одним концом внутри неподвижной части с возможностью продольного перемещения, на другом конце которой размещен схват, отличающаяся тем, что, с целью повышения точности позиционирования схвата за счет компенсации температурного изменения длины руки, она снабжена компенсационной вставкой, а на внутренней поверхности неподвижной части руки со стороны, обращенной к схвату, и на наружной поверхности подвижной части руки со стороны, обращенной к основанию, выполнены выступы, при этом вставка установлена между выступами, а коэффициент температурного расщирения материала, из
1
Изобретение относится к робототехнике и может быть использовано в качестве исполнительного органа промышленных роботов, работающих в изменяющихся рабочих температурах.
Целью изобретения является повышение точности позиционирования схвата за счет компенсации температурного изменения длины руки.
На фиг. 1 изображена рука робота по первому варианту; на фиг. 2 - то же, по второму варианту.
Рука робота по первому варианту содержит неподвижную часть 1, соединенную с основанием 2 робота, и подвижную часть 3, один конец которой расположен внутри не- подвижной части 1 с возможностью продольного перемещения, а на другом конце установлен схват 4. Подвижная 3 и неподвижная 1 части соединены между собой последовательно соединенными Эталонным элементом 5 и динамометрическим датчиком 6. Эталонный элемент 5 выполнен из материала с коэффициентом температурного расширения меньшим, чем у материала, из которого выполнены части 1 и 3 руки робота. На неподвижной части 1 установлен привод 7 пе- ремещения подвижной части 3.
Рука робота по второму варианту содержит неподвижную часть 1, соединенную с основанием 2 робота, и подвижную часть 3, один конец которой расположен внутри неподвижной части 1, а на другом установлен схват 4. На внутренней поверхности неподкоторого выполнена компенсационная вставка, удовлетворяет соотношению
a.f/fe AT (аи-/н аг1-/п)ДГ, где «ft, а и an - линейные коэффициенты термического расширения соответственно компенсационной вставки, неподвижной и подвижной частей руки;
А7 - диапазон рабочих температур;
/к, /н и 1 - длины соответственно компенсационной вставки, неподвижной и подвижной частей руки.
4. Рука робота по п. 3, отличающаяся тем, что, с целью упрощения выбора материала компенсационной вставки, она выполнена составной из частей с различными коэффициентами теглпературного расширения, расположенных последовательно вдоль оси руки.
вижной части 1 со стороны схвата 4, и наружной поверхности подвижной части 3 со стороны, обращенной к основанию 2, выполнены выступы 8 и 9 соответственно, между которыми установлена компенсационная вставка 10. Выступ 8 имеет возможность осевой регулировки посредством резьбы 11. При этом коэффициенты температурного расширения материалов, из которых изготовлены вставка 10 и части 1 и 3 руки, выбирают из уравнения
ак /к ДГ ( «ап /п) ДГ, где ак, аи, an - коэффициенты температур- го расширения соответственнокомпенсационнойвставки 10, неподвижной I и подвижной 3 частей руки; ДГ - диапазон рабочих температур;
, 1я и /п - длины соответственно компенсационной вставки 10 и подвижной и неподвижной частей руки.
Кроме того, компенсационная вставка 10 с целью упрощения выбора материала может состоять из нескольких частей, выполненных из материалов с различным коэффициентом температурного расширения.
Рука робота по первому варианту работает следующим образом.
При изменении рабочей температуры рука робота изменяет свою длину относительно номинальной. Номинальной считают,
длину руки в условиях, называемых в технике нормальными, в частности при рабочей температуре 293 К- Температурная деформация руки (т. е. ее удлинение или укорочение) вызывает аналогичную деформацию чувствительного элемента динамометрического датчика 6, который регистрирует величину деформации руки и выдает сигнал в систему управления роботом. В зависимости от величины руки, вызванной изменением рабочей температуры, система управления выдает сигнал команды, пропорциональный по величине сигналу датчика 6, на привод 7, с помощью которого изменяется положение подвижной части 3 руки относительно неподвижной 1. Тем самым длина руки робота
становится нормальной, а схват 4 находится в одном и том же положении.
Рука робота по второму варианту работает следующим образом.
При изменении рабочей температуры изменяют свои длины подвижная 3 и неподвижная 1 части, а также компенсационная вставка 10. Но вследствие того, что их длины и линейные коэффициенты термического расщирения выбраны по соотнощению
оск /к ДГ (ан /н ап /п)-Д/,
то удлинение частей 1 и 3 компенсируется удлинением вставки 10. Тем самым длина руки робота сохраняется постоянной, а схват 4 находится в одном и том же положении.

| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Промышленный робот | 1979 |
|
SU908242A3 |
1. Рука робота, состояш.ая из двух частей, неподвижной, связанной с основанием, и подвижной, установленной одним концом внутри неподвижной части с возможностью продольного перемещения, на другом конце которой размещен схват, отличающаяся тем, что, с целью повышения точности позиционирования схвата за счет компенсации температурного изменения длины руки, она снабжена эталонным элементом, выполненным из материала с коэффициентом температурного расширения меньшим, чем коэффициент температурного расширения материала руки, динамометрическим датчиком и приводом перемещения подвижной части, при этом динамометрический датчик и эталонный элемент соединены последовательно и расположены вдоль оси руки, их свободные концы закреплены соответственно на подвижной и неподвижной частях руки. s 7 / 7 7 Ю СО ел 4 фиг.1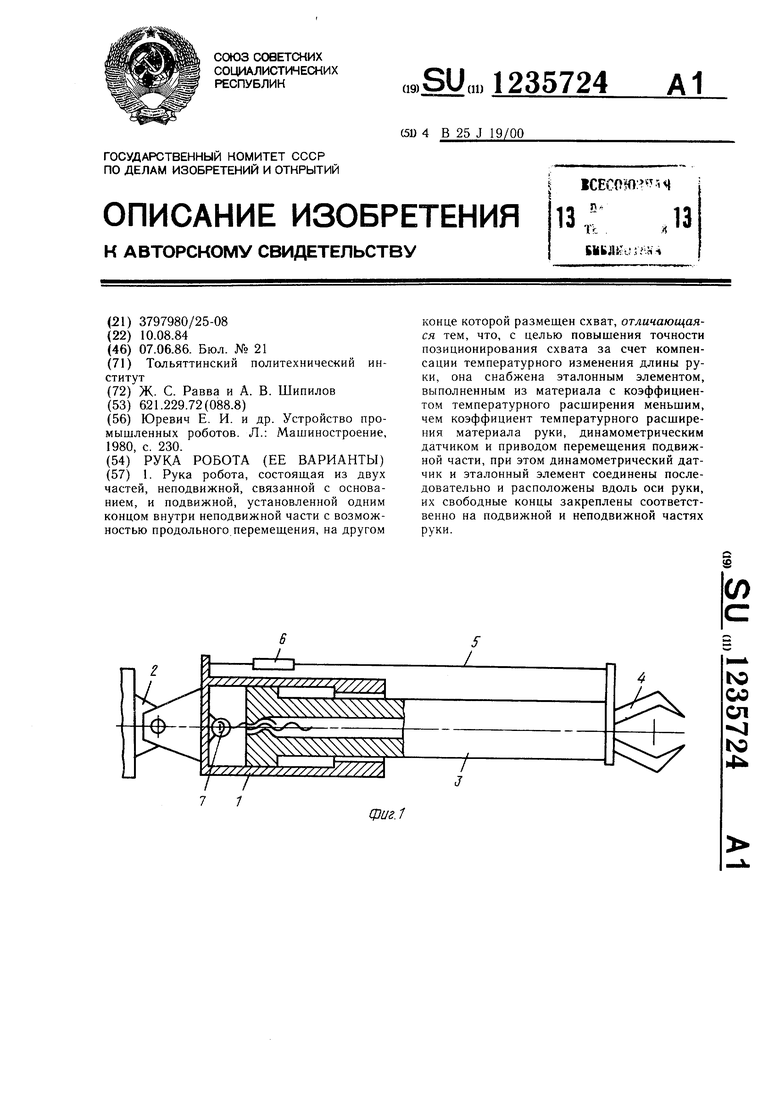
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л.: Машиностроение, 1980, с | |||
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
