Изобретение относится к робототелнике, а именно к конструкциям захватных узлов манипуляторов, и может быть использосано в грузозахватных механизмах грузопод ьем- ных машин.,
Цель изобретения - расширение технологических возможностей за счет исио.чьзова- ния захватного устройства в любых помещениях и далее более разнообразных предметов, а также повышение надежности в jaooTe за счет гфидания требуемой траектории дви- жения концу нальца.
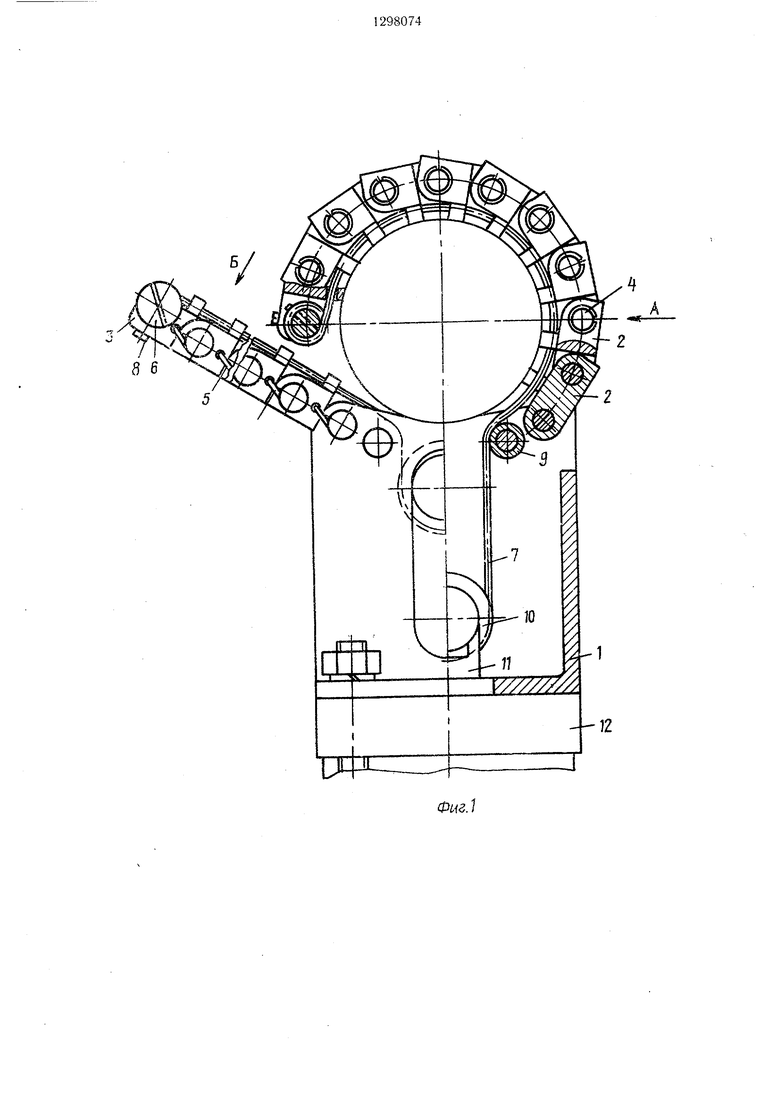
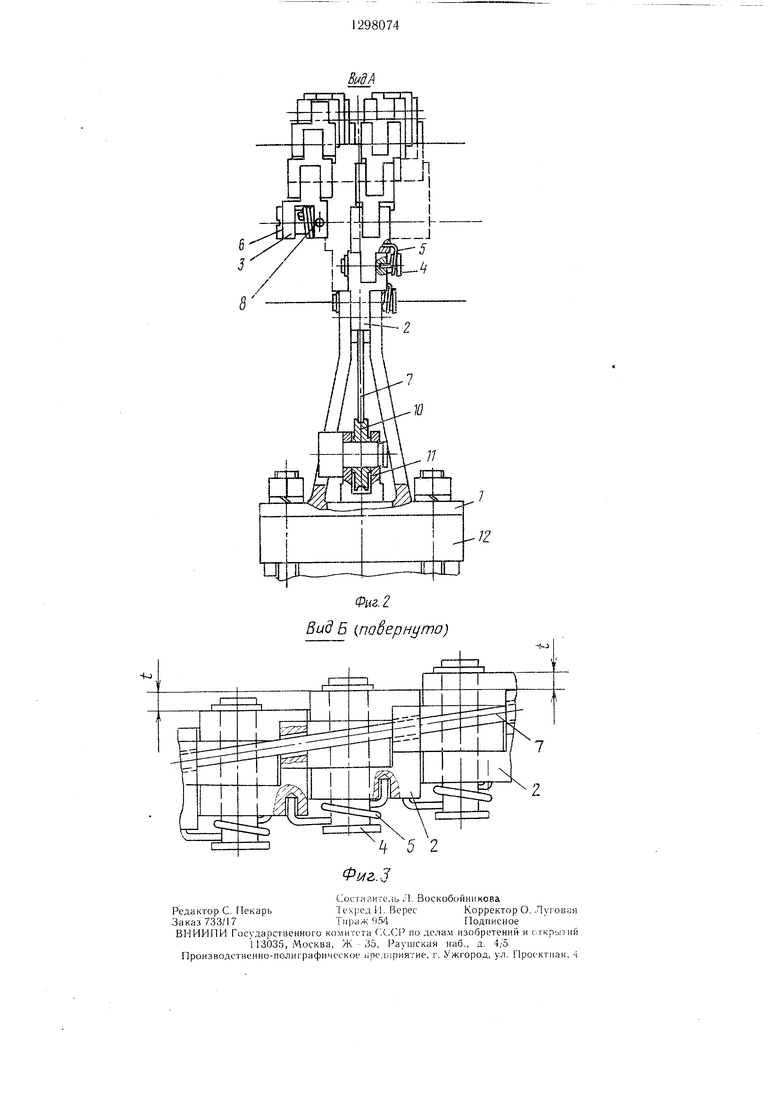
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - - вид А иа фнг. 1; на фиг. 3 - вид Б на фиг. 1.
SaxBatHoe устройство ссстош из ладони 1, к которой шарнирно нрисоединень наль- цы, состояшие из шарнирно соединенных между собой промежуточных звен,-.ев 2 и конечного звена 3. Присоединительные плоские поверхности каждого последуюнлего звена параллельно смещены относительно оси симметрии каждого предыдущего .sBeiui в одну сторону на постоянную величину, обесп:;- чиваюшую смещение конца пальца относительно ладони 1 и обеспечивающую скручивание пальца по ломаной винтовой спирали с требуемым шагом. Звенья 2 и 3 могут проворачиваться относительно друг друга на осях 4 посредством пружин 5 кручения, вставленных своими концами в соседние звенья.
Момент кручения пружин 5 кручении. предварительно закрученных,изменяется от ладони 1 к конечному звену 3. В конечном звене 3 каждого пальца установлены новоротные блоки 6, в которых закреплены концы гибкой тяги 7. Поворотные блоки 6 фиксируются установочными винтами 8. Гибкая тяга 7 проходит через отверстия каждого звена 2 и 3, через отк.. 1оня ои1ий ролик 9 и средней частью огибает блок 10, установленный на штоке 1 привода 12.
Захватное устройство работает следующим образом.
При втягивании штока П внутрь привода 12 усилие привода 12 передается через блок 10, гибкую тягу 7 на звенья.
Создается вращаюпхий момент относительно оси 4, который ура15новен1иваетси
5
.
У
удерживающим моментом предварительно закрученной пружины 5 кручения. За ечег различия крутящих моментов пружин круче- чия каждого пальца достигается необходимая последовательность перемещения зве- нь.в пальца, обеспечивая надежный захват предметов.
Если пред.меты подвижны, то пальцы их перемещают до прикосновения друг с другом к обвивают пучок пред.метов но ломапой винтовой спирали. Шаг спирали определяется шириной пальца и минимальным диаметром формируемого пучка предметов и задается величиной смещения присоединительных концов промежуточных звеньев 2 конструктивно. При захватывании песимметричнык предметов или предметов со смещенной осью от заданного положения палец, расположенный бли.же к Г1редмету, останавливается, но второй палец продолжает движение вследствие общей гибкой тяги 7, имеюнлей возможность переме- платься средней частью с блоком iO относительно штока 11. Захватывание будет надежным, а при поднятии предмета ,:укой упругие силы пружин 5 пальцев устаг овят его симметрично относительно оси руки.
TexHMfco-энономичеекая эффективность предлагаемого захватного устройства rio ::ра- знению с известным ожидается за ;:чет расишренир технологических возможностей при работе с большим диапазонам.
Формула изобретения
Захватное устройство, содержаплее шарнирно соединенные с ладонью нальцы.. ео- стояндие из звеньев, соединенных между со бой посредством шарниров, на осях которы.х расположены пружины кручения, крутящий момент которых различен, а также гибкую тягу и привод, отличающееся те.м, что, с целью расширения технологических возможностей к повышения надежности в работе, каждое последующее звено установлено на предыдущем е параллельным смещением его оси симметрии относительно оси симметрии предыдущего звена, при этом с.ме- звеньев каждого пальца разнонаправ- лепо.
s т
У.
У/////А6
Фиг.г Вид Б (no6epHi/mo)
Ч ь г
Фиг.З
Состлр.иге.ш Л. Воскобойникова
Редакторе. Пекарь 1схредМ. ВересКорректор О. .Пу1-овая
Заказ 733/17Т}1раж )5.1Подписное
ВНИИПИ Государственного комитета CCCl по делам изобретений и (открытий
1 13035, Москва, Ж 35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Прос ктиая, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1278205A1 |
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |
| Захват манипулятора | 1984 |
|
SU1237425A1 |
| Стенд с замкнутым силовым контуром для испытания муфт | 1981 |
|
SU966521A1 |
| ЦЕПНАЯ ПЕРЕДАЧА С АВТОМАТИЧЕСКИ ИЗМЕНЯЕМЫМ ШАГОМ | 2011 |
|
RU2492377C1 |
| УКУПОРОЧНОЕ СРЕДСТВО С УЛУЧШЕННОЙ ВОЗМОЖНОСТЬЮ СНЯТИЯ | 2004 |
|
RU2339558C2 |
| Устройство для механической обработки пластмассовых деталей | 1987 |
|
SU1479298A1 |
| Захват манипулятора | 1983 |
|
SU1133086A2 |
| Искусственная кисть | 1988 |
|
SU1553112A1 |
И;юбретение относится к робототехнике. Цель изобретения - повышение надежности в работе и расширение технологических возможностей за счет обеспечения работы устройства с предметами различной конфигурации. Захватный орган манипулятора выполнен в виде шарнирно соединенных между собой и с ладонью звеньев, соединенных между собой пружинами кручения различного крутящего момента. При этом каждое последующее звено установлено на предыдущем с параллельным смещением относите,чьно оси симметрии предыдущего звена, при этом смещение звеньев каждого пальца оазнонаправлеио. 3 ил. (/) с ю со 00 о | 4
| Захват манипулятора | 1984 |
|
SU1237425A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
