1
Изобретение относится к нодъемно-тран- епортному машиностроению, а имешю к гру- зоза.хватным устройствам.
Цель изобретения - обес 1ечение возможности автоматической отетроповки конструкций.
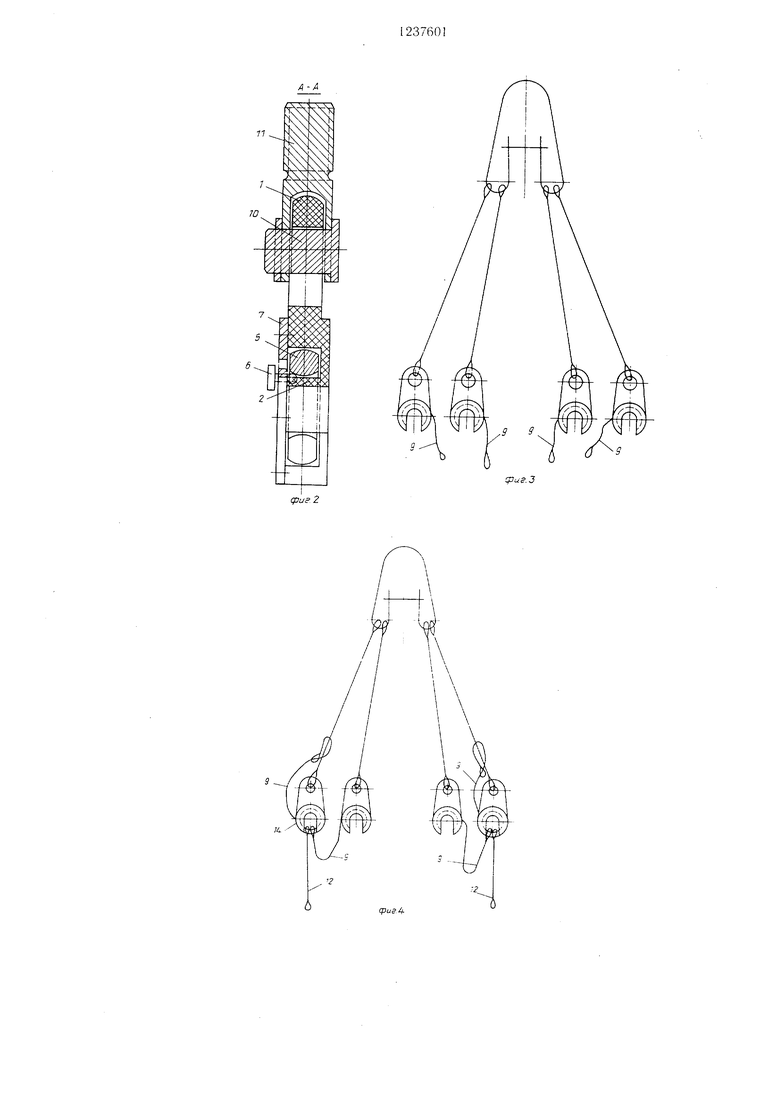
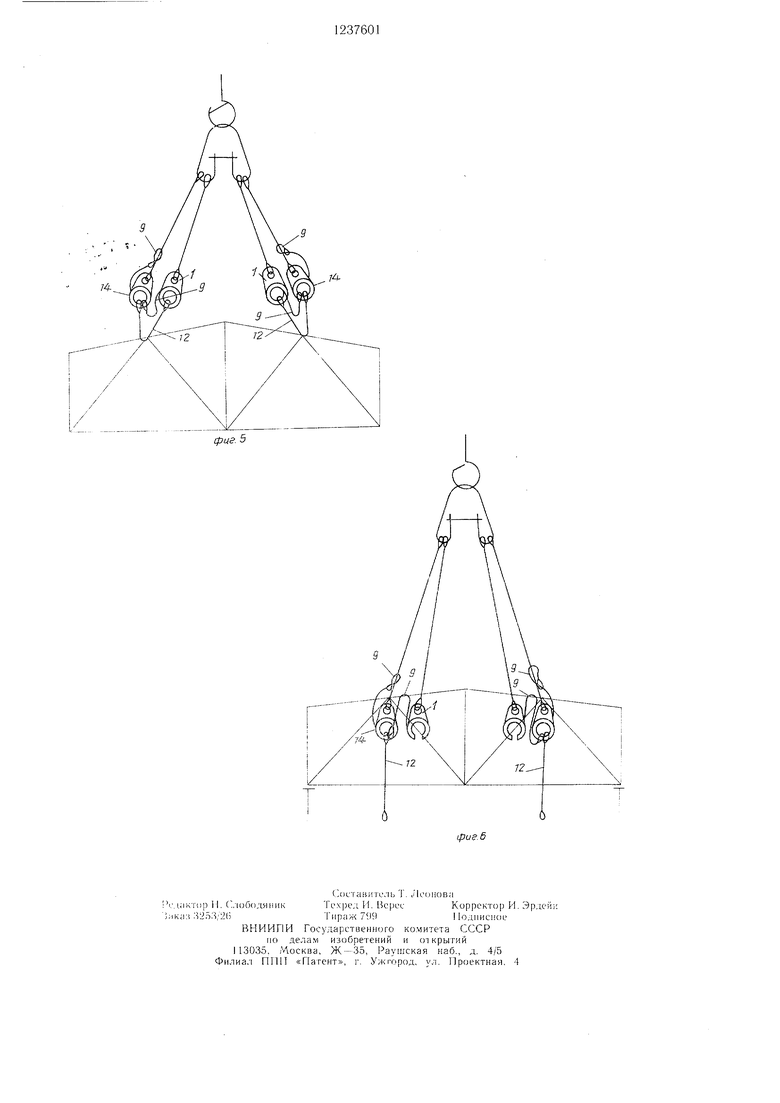
На фиг. 1 показано грузоза.хватпое ует- ройство, общий вид; на фиг. 2 - разрез Л-А на фиг. 1; па фиг. 3 - четыре.хветвевой строп с подвешенными на его концах грузозахватными органами е гибкими органами дистанционного управления; на фиг. 4 устройство, подготовленное для заетронов- ки пространственной конструкции фермы с последующей авто.матической отстроновкой, с подвешенными одними концами на несущие элементы, грузовыми стропами; на фиг. 5 - то же, с застронленной конструкцией на нееуп1ие эле.менты устройства посредством грузовых стропов, положение гибки.х органов дистанционного управления, находящихся выше верхнего нояеа фермы и не- рееекающих его в поперечпом направлении; па фиг. 6 - положение i-рузовых стропов и гибких органов дистанционного управления Hoc;ie автоматической отстроновки грузовых стропов от грузозахватных органов и, соответственно, конструкции - фермы.
Грузозахватное устройство содержит грузозахватный орган, включающий в себя KOJ)- fiyc 1 е1глоц1ного сечения с внутренней 2 и наружной 3 радиальными стенками и зевом 4, размещенный между етепками пово- ротньп несуп;ий элемент 5 е ручкой 6 и вырезом, перекрывающим зев 4, крьинку 7, запорный ограничитель 8 поворота несущего элемента, и прикрепленный к несуии му элемепту 1Ч1бк 1Й орган 9 диетапционно1 о управле1П1я. Грузозахватный орга:т спабжеп пр креп лепным посредством соединительного пальца 10 с-ьемн151м .хвостовиком 11, гру- зоза.хватным стропом 12 и крепежными деталями 13. Уст|)ойство с,;абжено дополнительным грузозахватным оргапом 14, к necynie- му элемепту которого прикреплеп гибкиГ( орган 9 дистапп.иоппо1-о управления основного грузозахватного о) ана.
Работа rpviu i-iaxBaTnoi-o устройства осу- П1.естзляетея следх ющим образом.
При ручном режиме работт.. чет)феквет- вевой строп (фи 3), на концах которш-о закренлены грузозахватные oprainj, сн; ,б- женные гибки.ми органами 9 дистанц1-:0нног()
1237601j
у11р)ав;1ения, навешивается посредством сер- ги па крюк грузоподъемной машины.
Строп путем поворота стреды подводится к 11еремеп|,аем()му 1 рузу п через зев 4 к)епится закдадпыми петлями (грузовыми стропами) на несущий элемент 5, разворачиваемый до упора ручкой 6 (фиг. 1 ) После перемещения укладки закрепления груза и ослаблення строп обратным поворотом ручки 6 :фузонесун1нй элемент 5
разворачивается в обратном нанравле1 ии. открывает зев 4 и освобождает петли груза (i-рузовые стропы).
При дистанционной строповке груза, например ригелей же;1езобетонных копструки цнй и.х застроиовка производится идентично ручной, а отстроповка осундеств.-.яется от rpy:-io:ui BaTHOro opra}ia пу 1ч м патяжепия гибкого органа 9 после укладки;, : ,.ния груза и oc,:ia6, iCHiiM строп x C i pOHC i B (4)пг. 3). При автоматической отстроповке i py:5a
0 от грузов|51 стропов 12 ( 4) па несущий :); емент 5 двух доп()лпител1)Пых грузозахиа - opi anoB навешиваются стр;;- иы 12 и гибкие (jpraHbi 9 диеташдкяшо ч.) управления осповны.х i py303a.,i орга- пов.
Грузоза.хватпые ycTpoi-iciT .a по; .1 одятся
к пepeмeiцaeм(JЙ конструкцииij- - P -
рые конны грузов1)Х стропов 12 подводятся под вер.хпий нояс нерсмешаемо копстпук- нип и закрепляются па ,их элементах о
30 основных грузов| гх органов 1, поворота 1есун1,е:;о элемента ручко(1 ( до ii()pa. Прг: этом г ибкие орггл) 11 дпстаннпонного управ, 1ения оказы 5аю гся В1;.;м1е верхнего пояса фермы, пересекая eicj li поперечном nanpan.ieHHH (фиг. 5).
35После подъема, установки п ч;1К Н леп;1Я
конструкции ферм я 6;iOK rpyuHioro no.in- спаста грузопод/ьемноИ машипы имеете с грузозахватным стоойст.и/ч- (;1ускается. | нбкие орган) 9 .|) lui поясе чо ст:пч-;др дмп (1)ермь: и прскра1п,акг дзп/кенис .
25
:-a:H)i ;;,iu TfniiuioH;ioi () -п ;;;Нле И, которые оа:и:;г)рачи1 а1от necyniiie э.емен 1: ; о. отксь - 4S зак)1 зез . о вобождая г) зов;,:е сгропы 12 от il) и coo i-ветствсипо г)у: о:5ахзатпого устройства. Автоматическая o -cTi oiujjiKa закопчена ((hnr. 6).
:-a:H)i ;;,iu TfniiuioH;ioi () -п ;;;Нле И, которые оа:и:;г)рачи1 а1от necyniiie э.емен 1: ; о. отксь - зак)1 зез . о вобождая г) зов;,:е сгропы 12 от il) и coo i-ветствсипо г)у: о:5ахзатпого устройства. Автоматическая o -cTi oiujjiKa закопчена ((hnr. 6).
А-А
77
70
fluff. J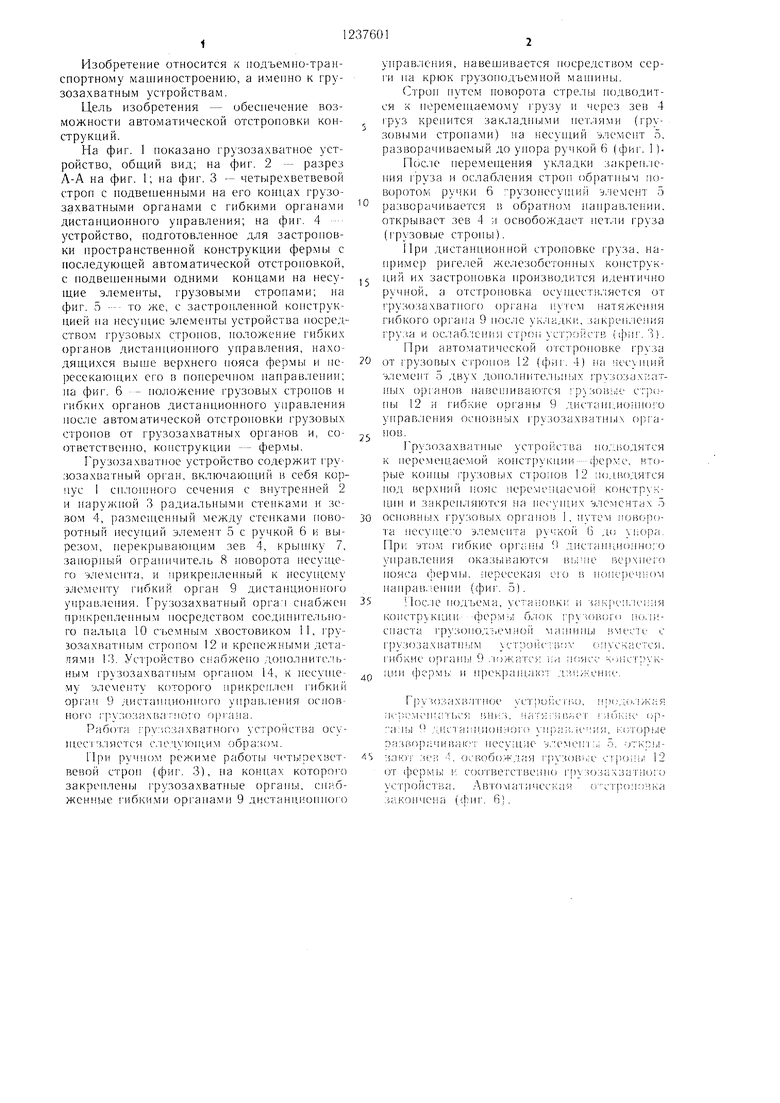
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для строповки и отстроповки груза | 1980 |
|
SU1044581A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2009978C1 |
| Грузовой крюк | 1985 |
|
SU1237606A1 |
| Грузозахватное устройство | 1988 |
|
SU1539156A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
SU1835768A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1379226A1 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| ГРУЗОВОЙ КРЮК | 1969 |
|
SU235271A1 |
| Грузозахватный орган | 1987 |
|
SU1555256A1 |

сриг4фиг. 5
| Строп для подъема груза | 1958 |
|
SU152295A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
