Фиг. 7
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в качестве грузозахватного устройства.
Целью изобретения является повышение надежности и удобства в эксплуатации.
На фиг. 1 схематично изображено предлагаемое грузозахватное устройство; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на фиг. 1.
рачивают относительно основного стакана 5. Поворот возможен благодаря спиралевидной прорези 11. При этом ось 9 перемещается продольно по прорези 10 в основном стакане 5 и палец 6 перекрывает зев 2 корпуса 1.
Для освобождения стропа 7 дополнительный стакан 8 с помощью гибкого органа 12 дистанционного управления повоГрузозахватное устройство содержит кор- 10 рачивают в противоположном направлении. пус 1 с зевом 2, прорезью 3 и штангой 4 для
соединения с грузоподъемным механизмом. С корпусом 1 со стороны зева 2 жестко установлен стакан 5. В корпусе 1 с возможностью перекрывания зева 2 и перемещения внутри стакана 5 размещен палец 6 под строп 7. Устройство снабжено дополнительным поворотным стаканом 8, установленным снаружи основного стакана 5 коаксиально ему} и осью 9, размещенной
Формула изобретения
Грузозахватное устройство, содержащее связанный с подъемной машиной корпус с
зевом, жестко соединенный с корпусом со стороны последнего стакан, палец под строп груза, установленный с возможностью перекрывания зева и перемещения внутри стакана, и гибкий орган дистанционного
в диаметральной плоскости пальца 6 со сто- 20 управления, отличающееся тем, что, с целью роны его конца, взаимодействующего с внут-повышения надежности и удобства в эксплуренней полостью основного стакана 5, и ватации, стакан выполнен по крайней мере с
диаметральной плоскости обоих стаканов 5 и 8.
Основной стакан 5 выполнен по крайней мере с одной продольной прорезью 10 для перемещения в ней конца оси 9. Дополнительный стакан 8 выполнен по крайней мере с одной спиралевидной прорезью 1 1 для размещения этого же конца оси 9 и установлен с возможностью поворота относительно основного стакана 5. Гибкий орган 12 дистанционного управления соединен с дополнительным стаканом 8.
Устройство работает следующим образом.
Строп 7 заводят в зев 2 грузозахватного устройства. Дополнительный стакан 8 пово25
одной продольной прорезью, а устройство снабжено дополнительным поворотным стаканом, установленным снаружи основного стакана коаксиально ему, выполненным по крайней мере с одной спиралевидной прорезью на боковой поверхности и соединенным с гибким органом дистанционного управления, размещенным на наружной бо3Q ковой поверхности со стороны зева корпуса, и осью, жестко закрепленной на пальце в диаметральной его плоскости со стороны расположенного во внутренней полости основного стакана его конца и размещенной своим концом в продольной и спиралевидной про35 резях основного и дополнительного стаканов.
рачивают относительно основного стакана 5. Поворот возможен благодаря спиралевидной прорези 11. При этом ось 9 перемещается продольно по прорези 10 в основном стакане 5 и палец 6 перекрывает зев 2 корпуса 1.
Для освобождения стропа 7 дополнительный стакан 8 с помощью гибкого органа 12 дистанционного управления пово рачивают в противоположном направлении.
Формула изобретения
Грузозахватное устройство, содержащее связанный с подъемной машиной корпус с
зевом, жестко соединенный с корпусом со стороны последнего стакан, палец под строп груза, установленный с возможностью перекрывания зева и перемещения внутри стакана, и гибкий орган дистанционного
одной продольной прорезью, а устройство снабжено дополнительным поворотным стаканом, установленным снаружи основного стакана коаксиально ему, выполненным по крайней мере с одной спиралевидной прорезью на боковой поверхности и соединенным с гибким органом дистанционного управления, размещенным на наружной боковой поверхности со стороны зева корпуса, и осью, жестко закрепленной на пальце в диаметральной его плоскости со стороны расположенного во внутренней полости основного стакана его конца и размещенной своим концом в продольной и спиралевидной прорезях основного и дополнительного стаканов.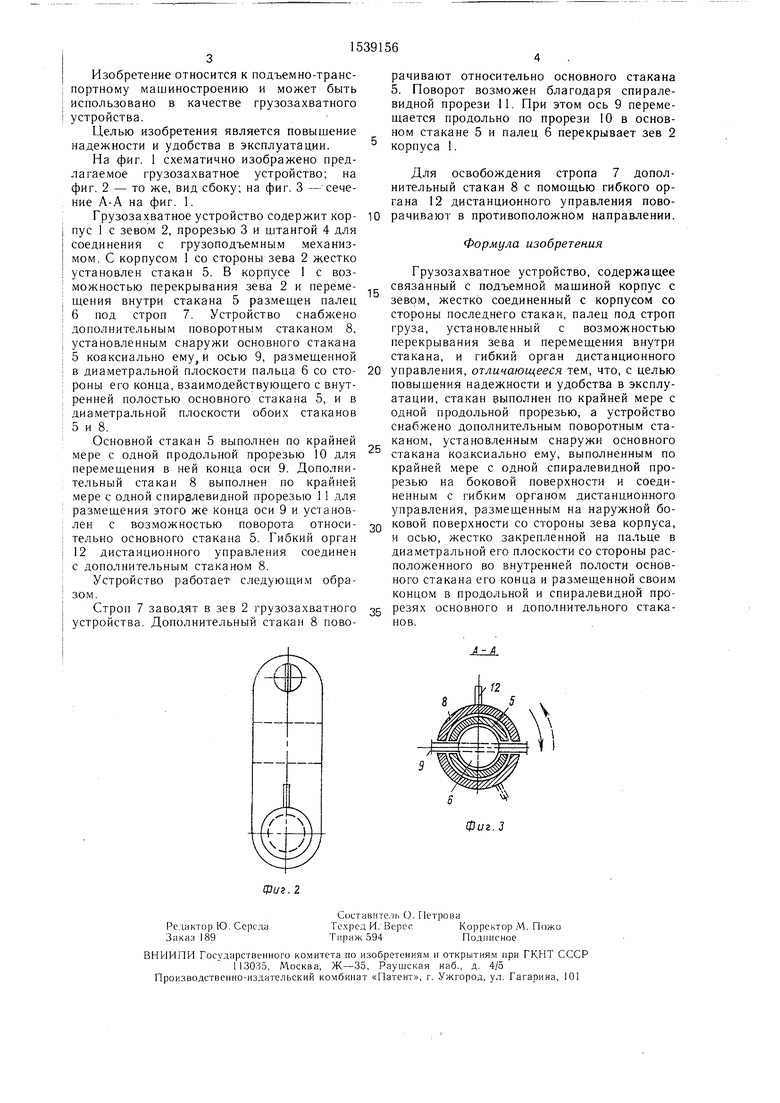
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Строповочное устройство | 1990 |
|
SU1787920A1 |
| Грузозахватное устройство | 1990 |
|
SU1744042A1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2031071C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1990 |
|
SU1754619A2 |
| Грузозахватное устройство | 1984 |
|
SU1237601A1 |
| Грузозахватная система | 1987 |
|
SU1643414A1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при строительно-монтажных работах для обеспечения автоматической расстроповки грузов в процессе их перемещения и монтажа. Цель изобретения - повышение надежности и удобства в эксплуатации. Грузозахватное устройство содержит корпус 1 с зевом 2, связанные с корпусом 1 коаксиально расположенные стаканы 5 и 8, палец 6 под строп 7. Строп 7 заводят в зев 2. Дополнительный наружный стакан 8, выполненный со спиралевидной прорезью 11, поворачивают относительно основного стакана 5. Ось 9 перемещается продольно по прорези 10, выполненной в основном неподвижном стакане 5, и обеспечивает продольное перемещение пальца 6, перекрывающего зев 2. Для освобождения стропа 7 гибким органом 12 дистанционного управления дополнительный стакан 8 поворачивают в противоположном направлении. 3 ил.
А-А
| Строп для подъема груза | 1958 |
|
SU152295A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
