Изобретение относится к подъемно- транспортным устройствам.
Цель изобретения - расширение функциональных возможностей путем предварительной установки заданного угла поворота и автоматического возврата накладок в первоначальное положение.
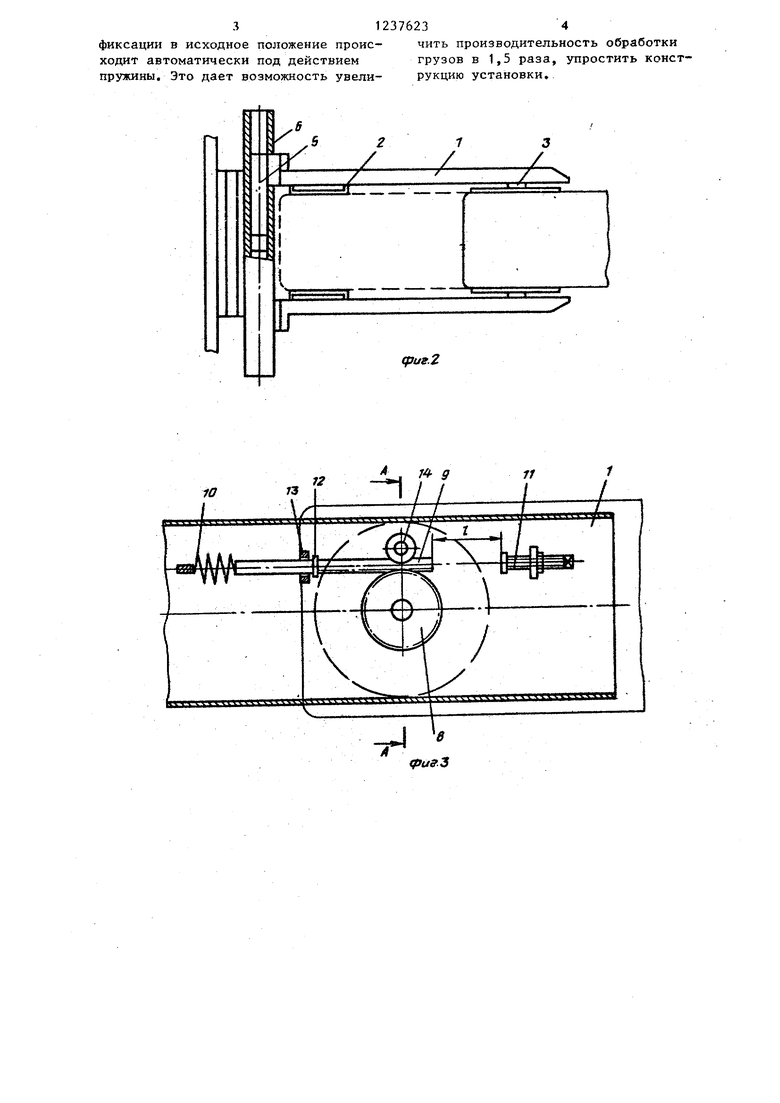
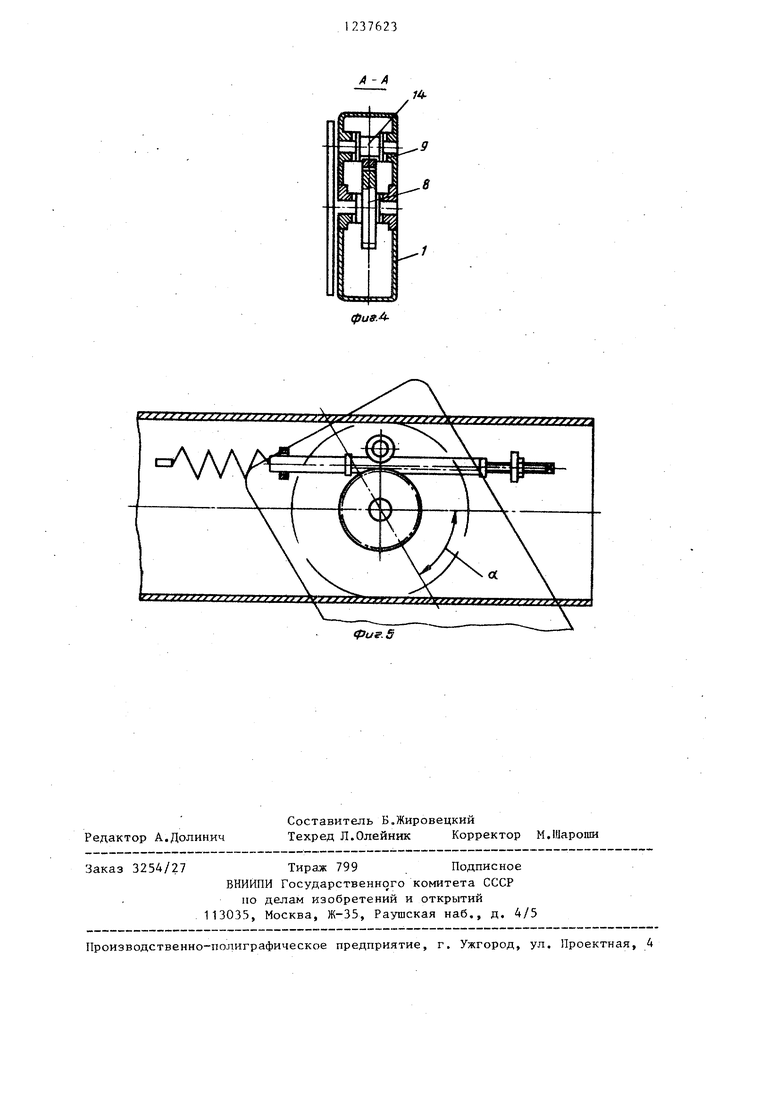
На фиг„ 1 изображен захват-кантователь, вид сбоку; на фиг. 2 - то же вид сверху; на фиг. 3 - механизм фиксации в первоначальном состоянии; на фиг о 4 - сечение А-А на фиг. 3j на фиг. 5 - механизм фиксации в рабочем состоянии.
Захват-кантователь содержит рычаги 1 , у основания которых жестко закреплены накладки 2, а на свободных концах шарнирно закреплены поворотные накладки 3. Рычаг через планку 4 соединен со стержневым ползуном 5, который имеет возможность перемещаться по траверсе, вьтолненной в виде труб 6. Планка 4 соединена с гидроцилиндром 7. Поворотные накладки 3 жестко соединяются при помощи вала с шестерней 8, расположенной внутри рычага 1 (фиг. 3, 4). Шестерня 8 воздействует с зубчатой рейкой 9 и соединена с рычагом 1 при помощи пружины 10. Свободный конец рейки 9 взаимодействует с регулирующим винтом 11 (фиг. 5). На рейке 9 вьшолнен выступ 12, которьй взаимодействует со стопорным кольцом 13. Над рейкой 9 с :противоположной стороны шестерни 8 расположен фиксирующий ролик 14,
При перемещении груза без кантования захват груза осуществляют посредством неподвижных накладок 2,рас™ положенных у основания рычагов, либо посредством накладок 3. В этом случае груз сжимается в четырех точках и не имеет возможности изменить свое положение относительно рычагов 1, При подъеме и повороте груза под некоторым углом (от О до 90) в вертикальной плоскости захват осуществляют только при помощи накладок 3, расположенных на свободньк концах рычагов 1. В этом случае центр тяжести смещен на некоторое расстояние от оси вращения накладок 3. В результате под действием собственного вес- груз поворачивается при подъеме на уголot по отношению к горизонтали и фиксируется в этом положении механизмом фиксации.
s
0
При подъеме груз может полностью поворачиваться и принять вертикальное положение.
Одновременно с поворотом груза по- ворачивается и накладка 3, которая жестко соединена при помощи вала с шестерней 8, которая в свою очередь- взаимодействует с рейкой 9.
В исходном положении рейка 9 под воздействием пружины 10 занимает крайнее левое положение. Полное пе- ремещ€1ние рейки влево ограничивается стопорным кольцом 13 и расположенным на ней выступом 12.
При подъеме груза шестерня,8 поворачивается вместе с накладкой 3 и перемещает рейку вправо до стыковки с регулирующим винтом 11, в результате, чего груз фиксируется в вертикальной плоскости под углом об к горизонтали, а пружина, связьшающая рейку с рычагом, растягивается. Угол поворота oL находится в прямой линейной зависимости от первоначального рас- 5 стояния 1 между рейкой 9 и регулирующим винтом 11. При необходимости увеличения угла поворота увеличивают расстояние 1 между рейкой 9 к первоначальным положением винта и наобо рот. Когда рычаг 1 освобождает груз, под воздействием пружины 10 рейка 9 возвращается в исходное положение, а взаимодействующая с ней шестерня поворачивается на угол об вместе с накладкой и также занимает исходное, положение. Надежное взаимодействие рейки и шестерни обеспечивается при помощи ролика 14.
Наличие неподвижных накладок у основания рычагов и шарнирно соединенных накладок на их свободных концах дает возможность захвату расширить свои функциональные возможности. При необходимости осуществления простых 5 перекладочных работ захват груза осуществляется полностью при помощи неподвижных и шарнирно соединенньк накладок.
При необходимости поворота груза в вертикальной плоскости с его фиксацией на определенный угол (от О до 90°) или при кантовании его захват осуществляется только шарнирно-пово- ротными накладками, расположенными на свободных концах рычагов.
0
5
0
0
5
Поворот груза в пространстве происходит под воздействием его же силы тяжести, а возвращение мезанизма
- 12376234
фиксации в исходное положение проис- чить производительность обработки ходит автоматически под действием грузов в 1,5 раза, упростить конст- пружины. Это дает возможность увели- рукцию установки.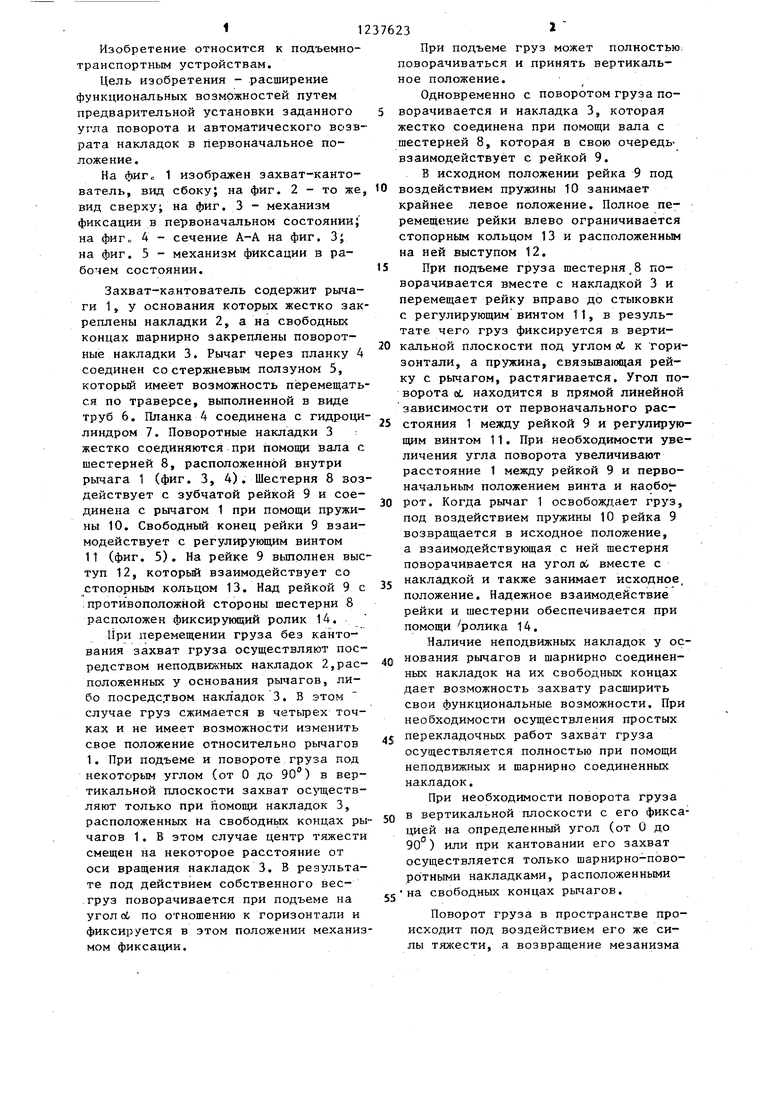
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1973 |
|
SU446460A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Захват-кантователь | 1982 |
|
SU1031867A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Захват-кантователь | 1983 |
|
SU1221168A1 |
| Кантователь шагового конвейера | 1988 |
|
SU1627467A1 |
| Перегрузочное устройство для изде-лий | 1979 |
|
SU816897A1 |
| Кантователь | 1990 |
|
SU1815095A1 |
| Захват-кантователь | 1978 |
|
SU819038A1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |

to
/
tpuy.S
Редактор А.Долинич
Составитель Б.Жировецкий
Техред Л.Олейник Корректор М.Шароши
3254/27
Тираже 799Подписное
ВНИЙПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
