Изобретение относится к устройствам программного управления от электронной вычислительной машины группой станков.
Цель изобретения - повышение надежности системы путем автоматического контроля каналов связи ЭВМ-УСУ в процессе функционирования системы и аварийного останова станка при неисправности его канала связи.:
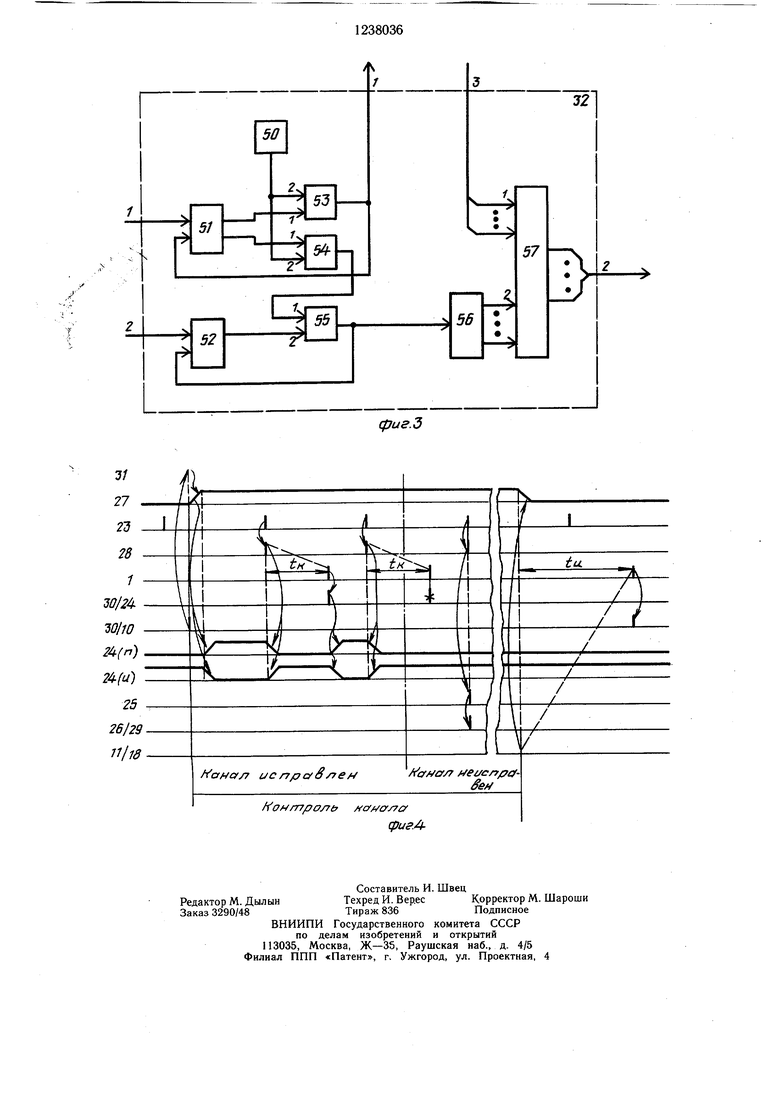
На фиг. 1 представле;на обшая блок-схема системы; на фиг.2 - пример конкретного ю построения коммутатора; на фиг.З - пример конкретного выполнения блока ввода-вывода; на фиг.4 - временные диаграммы работы системы.
Система содержит ЭВМ 1, процессор 2,
В процессе работы системы блоки программы обработки считываются из внешнего ЗУ в оперативное ЗУ 3, откуда кадрами побайтно передаются через элемент ИЛИ 57 блока 32 ввода-вывода и коммутатор 30 в УСУ 7, причем вывод очередного блока из внешнего ЗУ 4 в оперативное осуществляется в процессе отработки станком 8 (вывода оперативного ЗУ 3 в УСУ 7) предыдуш,е- го блока. Кадры программы обработки в УСУ 7 поступают через блок 10 связи в интерполятор 6 и дешифратор 9 технологических и вспомогательных команд. Унитарный код 14 с выхода интерполятора 6 и команды с выхода 22 дешифратора 9 поступают на станок 8 для отработки. Команды
оперативное запоминающее устройство (ОЗУ) 5 конца отработки каждого кадра с выхода 13 3, внешнее ЗУ 4, устройство 5 ввода-вывода, интерполятора 6 поступают в блок 11 форми- интерполятор 6, устройство 7 станочного управления (УСУ), станок 8 дешифратор 9
технологических и вспомогательных команд.
рования динамического приоритета, в котором в зависимости от наличия и частоты унитарного кода на выходе 14 интерполя- блок 10 связи, блок 11 формирования дина- Q торз 6, а также от величины задержки по- мического приоритета, пульт 12 оператора, ступления из ЭВМ 1 очередного кадра программы обработки формируются запросы различного уровня приоритета, поступаюшие на первый вход блока 32 ввода-вывода контвыход 13 сигнала конца отработки кадра, выход 14 унитарного кода, выход 15 сигнала «а торможения, выход 16 кода приоритета, блок 17 запоминания команд останова, первый элемент И 18, первый элемент ИЛИ 19, 25 При поступлении запроса на первый вход выход 20 сигнала «в торможения, выход блока 32 вводавывода контрольного байта 21 сигнала «с торможения, выход 22 технологических и вспомогательных команд, герольного байта.
триггер 51 перебрасывается в единичное состояние и высоким потенциалом на единичном выходе подготавливает первый элемент И 53 к прохождению импульса с выхода
нератор 23 тактовых импульсов, регистр 24, блок 25 элементов И второй элемент ИЛИ 26,
триггер 51 перебрасывается в единичное состояние и высоким потенциалом на единичном выходе подготавливает первый элемент И 53 к прохождению импульса с выхода
триггер 27, второй элемент И 28, выход 29 30 генератора 50 тактовых импульсов. Ближайсигнала «d торможения, коммутатор 30, дешифратор команды 31 «Конец кадра и блок 32 ввода-вывода.
Второй элемент ИЛИ 26, включенный последовательно с первым элементом ИЛИ 19,
ший импульс проходит на выход элемента И 53 и поступает с первого выхода блока 32 ввода-вывода на вход ЭВМ 1 как запрос очередного кадра программы. Одновременно выходной импульс элемента И 53 устанавсобирает единичные сигналы с выходов блока ливает первый триггер 51 в нулевое состоя- 25 элементов И в один сигнал «d тормо- ние, запрещая прохождение импульсов генератора 50 тактовых импульсов через первый элемент И 53 на вход ЭВМ 1. В ответ на
жения, который затем проходит через первый элемент ИЛИ 19 аналогично сигналам «а, «в и «с торможения.
поступивший запрос ЭВМ 1 выводит очеред- 4Q ной кадр программы.
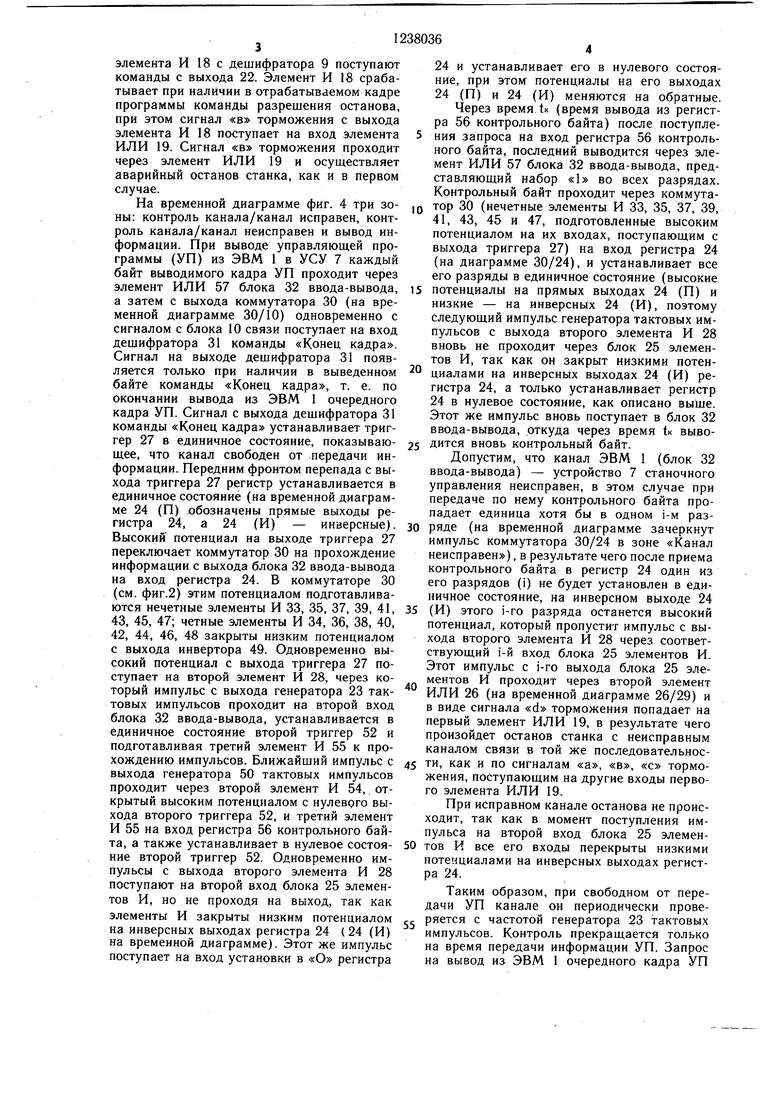
Коммутатор 30 (фиг.2) состоит из шестнадцати элементов И 33-48 и инвертора 49.
Блок 32 ввода-вывода (фиг.З) содержит генератор 50 тактовых импульсов, первый 51 и второй 52 триггеры, первый 53, второй
поступивший запрос ЭВМ 1 выводит очеред- 4Q ной кадр программы.
Если при достижении максимального наперед заданного уровня приоритета информация из ЭВМ 1 не поступает, то блок 11 формирования динамического приоритета формирует сигнал «а торможения, который
54 и третий 55 элементы И, регистр 56 45 через элемент ИЛИ 19 поступает на блок контрольного байта и элемент ИЛИ 57. 10 связи для блокировки поступления в УСУ
7 очередного кадра программы, в интерполятор 6 для торможения движения по коРабота системы управления поясняется временной диаграммой на фиг.4.
Работа и контроль информации в канале внешнее ЗУ - оперативное ЗУ в предлагаемой системе полностью аналогичны работе и контролю в известной системе.
При первоначальном вводе программ обработки деталей с устройства 5 ввода-вывода во внешнее ЗУ в процессоре 2 производится анализ вводимой программы и в кадрах программы с холостыми перемещениями приформировываются команды разрешения останова.
55
ординатам и на пульт 12 оператора для сигнализации об аварийном останове.
Так как при передаче каждого блока программы из внешнего ЗУ 4 в оперативное ЗУ 3 процессор 2 осуществляет контроль передаваемой информации, то при выявлении ошибки он передает сигнал об этом в блок 17 запоминания команд останова, в котором он запоминается как команда аварийного останова, поступающая на один из входов элемента И 18. На второй вход
В процессе работы системы блоки программы обработки считываются из внешнего ЗУ в оперативное ЗУ 3, откуда кадрами побайтно передаются через элемент ИЛИ 57 блока 32 ввода-вывода и коммутатор 30 в УСУ 7, причем вывод очередного блока из внешнего ЗУ 4 в оперативное осуществляется в процессе отработки станком 8 (вывода оперативного ЗУ 3 в УСУ 7) предыдуш,е- го блока. Кадры программы обработки в УСУ 7 поступают через блок 10 связи в интерполятор 6 и дешифратор 9 технологических и вспомогательных команд. Унитарный код 14 с выхода интерполятора 6 и команды с выхода 22 дешифратора 9 поступают на станок 8 для отработки. Команды
конца отработки каждого кадра с выхода 13 интерполятора 6 поступают в блок 11 форми-
рования динамич ром в зависимо унитарного кода торз 6, а также ступления из ЭВ граммы обработ различного уровн на первый вход б
При поступле блока 32 вводарольного байта.
При поступлении запроса на первый вход блока 32 вводавывода контрольного байта
триггер 51 перебрасывается в единичное состояние и высоким потенциалом на единичном выходе подготавливает первый элемент И 53 к прохождению импульса с выхода
генератора 50 тактовых импульсов. Ближайгенератора 50 тактовых импульсов. Ближайший импульс проходит на выход элемента И 53 и поступает с первого выхода блока 32 ввода-вывода на вход ЭВМ 1 как запрос очередного кадра программы. Одновременно выходной импульс элемента И 53 устанавливает первый триггер 51 в нулевое состоя- ние, запрещая прохождение импульсов генератора 50 тактовых импульсов через первый элемент И 53 на вход ЭВМ 1. В ответ на
поступивший запрос ЭВМ 1 выводит очеред- ной кадр программы.
Если при достижении максимального наперед заданного уровня приоритета информация из ЭВМ 1 не поступает, то блок 11 формирования динамического приоритета формирует сигнал «а торможения, который
через элемент ИЛИ 19 поступает на блок 10 связи для блокировки поступления в УСУ
7 очередного кадра программы, в интерполятор 6 для торможения движения по ко
ординатам и на пульт 12 оператора для сигнализации об аварийном останове.
Так как при передаче каждого блока программы из внешнего ЗУ 4 в оперативное ЗУ 3 процессор 2 осуществляет контроль передаваемой информации, то при выявлении ошибки он передает сигнал об этом в блок 17 запоминания команд останова, в котором он запоминается как команда аварийного останова, поступающая на один из входов элемента И 18. На второй вход
элемента И 18 с дешифратора 9 поступают команды с выхода 22. Элемент И 18 срабатывает при наличии в отрабатываемом кадре программы команды разрешения останова, при этом сигнал «в торможения с выхода элемента И 18 поступает на вход элемента ИЛИ 19. Сигнал «в торможения проходит через элемент ИЛИ 19 и осуществляет аварийный останов станка, как и в первом случае.
24 и устанавливает его в нулевого состояние, при этом потенциалы на его выходах 24 (П) и 24 (И) меняются на обратные. Через время к (время вывода из регистра 56 контрольного байта) после поступле- 5 ния запроса на вход регистра 56 контрольного байта, последний выводится через элемент ИЛИ 57 блока 32 ввода-вывода, представляющий набор «I во всех разрядах. Контрольный байт проходит через коммутаНа временной диаграмме фиг. 4 три зо- |Q тор 30 (нечетные элементы И 33, 35, 37, 39,
ны: контроль канала/канал исправен, контроль канала/канал неисправен и вывод информации. При выводе управляющей программы (УП) из ЭВМ 1 в УСУ 7 каждый байт выводимого кадра УП проходит через
41, 43, 45 и 47, подготовленные высоким потенциалом на их входах, поступающим с выхода триггера 27) на вход регистра 24 (на диаграмме 30/24), и устанавливает все его разряды в единичное состояние (высокие
элемент ИЛИ 57 блока 32 ввода-вывода, is потенциалы на прямых выходах 24 (П) и
а затем с выхода коммутатора 30 (на временной диаграмме 30/10) одновременно с сигналом с блока 10 связи поступает на вход дешифратора 31 команды «Конец кадра. Сигнал на выходе дешифратора 31 появнизкие - на инверсных 24 (И), поэтому следующий импульс генератора тактовых импульсов с выхода второго элемента И 28 вновь не проходит через блок 25 элементов И, так как он закрыт низкими потенляется только при наличии в выведенном циалами на инверсных выходах 24 (И) ре- байте команды «Конец кадра, т. е. по гистра 24, а только устанавливает регистр окончании вывода из ЭВМ 1 очередного 24 в нулевое состояние, как описано выше, кадра УП. Сигнал с выхода дешифратора 31 команды «Конец кадра устанавливает тригЭтот же импульс вновь поступает в блок 32 ввода-вывода, откуда через время 1к вывогер 27 в единичное состояние, показываю- 25 дится вновь контрольный байт.
щее, что канал свободен от передачи информации. Передним фронтом перепада с выхода триггера 27 регистр устанавливается в единичное состояние (на временной диаграмме 24 (П) обозначены прямые выходы регистра 24, а 24 (И)
Допустим, что канал ЭВМ 1 (блок 32 ввода-вывода) - устройство 7 станочного управления неисправен, в этом случае при передаче по нему контрольного байта пропадает единица хотя бы в одном i-м разВысокий потенциал на выходе триггера 27 переключает коммутатор 30 на прохождение информации с выхода блока 32 ввода-вывода на вход регистра 24. В коммутаторе 30 (см. фиг.2) этим потенциалом подготавливаются нечетные элементы И 33, 35, 37, 39, 41, 35 43, 45, 47; четные элементы И 34, 36, 38, 40, 42, 44, 46, 48 закрыты низким потенциалом с выхода инвертора 49. Одновременно высокий потенциал с выхода триггера 27 поступает на второй элемент И 28, через который импульс с выхода генератора 23 тактовых импульсов проходит на второй вход блока 32 ввода-вывода, устанавливается в единичное состояние второй триггер 52 и подготавливая третий элемент И 55 к проинверсные). зо ряде (на временной диаграмме зачеркнут
импульс коммутатора 30/24 в зоне «Канал неисправен), в результате чего после приема контрольного байта в регистр 24 один из его разрядов (i) не будет установлен в единичное состояние, на инверсном выходе 24 (И) этого i-ro разряда останется высокий потенциал, который пропустит импульс с выхода второго элемента И 28 через соответствующий i-й вход блока 25 элементов И. Этот импульс с i-ro выхода блока 25 элементов И проходит через второй элемент ИЛИ 26 (на временной диаграмме 26/29) и в виде сигнала «d торможения попадает на первый элемент ИЛИ 19, в результате чего произойдет останов станка с неисправным каналом связи в той же последовательносхождению импульсов. Ближайший импульс с 5 ти, как и по сигналам «а, «в, «с тормовыхода генератора 50 тактовых импульсов проходит через второй элемент И 54, открытый высоким потенциалом с нулеврго выхода второго триггера 52, и третий элемент И 55 на вход регистра 56 контрольного байжения, поступающим на другие входы первого элемента ИЛИ 19.
При исправном канале останова не происходит, так как в момент поступления импульса на второй вход блока 25 элемента, а также устанавливает в нулевое состоя- 50 тов И все его входы перекрыты низкими ние второй триггер 52. Одновременно им- потенциалами на инверсных выходах регист- пульсы с выхода второго элемента И 28 ра 24.
поступают на второй вход блока 25 элемен-Таким образом, при свободном от передачи УП канале он периодически проветов И, но не проходя на выход, так как
элементы И закрыты низким потенциалом,с ряется с частотой генератора 23 тактовых
на инверсных выходах регистра 24 (24 (И)импульсов. Контроль прекращается только
на временной диаграмме). Этот же импульсна время передачи ииформации УП. Запрос
поступает на вход установки в «О регистрана вывод из ЭВМ 1 очередного кадра УП
24 и устанавливает его в нулевого состояние, при этом потенциалы на его выходах 24 (П) и 24 (И) меняются на обратные. Через время к (время вывода из регистра 56 контрольного байта) после поступле- ния запроса на вход регистра 56 контрольного байта, последний выводится через элемент ИЛИ 57 блока 32 ввода-вывода, представляющий набор «I во всех разрядах. Контрольный байт проходит через коммутатор 30 (нечетные элементы И 33, 35, 37, 39,
тор 30 (нечетные элементы И 33, 35, 37, 39,
41, 43, 45 и 47, подготовленные высоким потенциалом на их входах, поступающим с выхода триггера 27) на вход регистра 24 (на диаграмме 30/24), и устанавливает все его разряды в единичное состояние (высокие
потенциалы на прямых выходах 24 (П) и
потенциалы на прямых выходах 24 (П) и
низкие - на инверсных 24 (И), поэтому следующий импульс генератора тактовых импульсов с выхода второго элемента И 28 вновь не проходит через блок 25 элементов И, так как он закрыт низкими потенциалами на инверсных выходах 24 (И) ре- гистра 24, а только устанавливает регистр 24 в нулевое состояние, как описано выше,
циалами на инверсных выходах 24 (И) ре- гистра 24, а только устанавливает регистр 24 в нулевое состояние, как описано выше,
Этот же импульс вновь поступает в блок 32 ввода-вывода, откуда через время 1к выводится вновь контрольный байт.
дится вновь контрольный байт.
Допустим, что канал ЭВМ 1 (блок 32 ввода-вывода) - устройство 7 станочного управления неисправен, в этом случае при передаче по нему контрольного байта пропадает единица хотя бы в одном i-м разряде (на временной диаграмме зачеркнут
ряде (на временной диаграмме зачеркнут
импульс коммутатора 30/24 в зоне «Канал неисправен), в результате чего после приема контрольного байта в регистр 24 один из его разрядов (i) не будет установлен в единичное состояние, на инверсном выходе 24 (И) этого i-ro разряда останется высокий потенциал, который пропустит импульс с выхода второго элемента И 28 через соответствующий i-й вход блока 25 элементов И. Этот импульс с i-ro выхода блока 25 элементов И проходит через второй элемент ИЛИ 26 (на временной диаграмме 26/29) и в виде сигнала «d торможения попадает на первый элемент ИЛИ 19, в результате чего произойдет останов станка с неисправным каналом связи в той же последовательносформируется в блоке 11 формирования динамического приоритета и с его выхода 16 (на временной диаграмме 11/16) поступает на первый вход блока 32 ввода-вывода, а с его первого выхода - на вход ЭВМ 1. Одновременно этот импульс устанавливает в нулевое состояние триггер 27. Нулевой потенциал на выходе триггера 27 закрывает второй элемент И 28, запрещая поступление тактовых импульсов на блок 25 элементов И, регистр 24 и второй вход блока 32 ввода- вывода для запроса контрольных байтов. Этот же нулевой потенциал с выхода триггера 27 поступает на уп равляющий вход коммутатора 30 и переключает его, высоким потенциалом с выхода инвертора 49 (фиг.2), открываются четные элементы И 34, 36, 38, 40, 42, 44, 46 и 48, обеспечивая прохождение информации с первого выхода ЭВМ 1 через блок 32 ввода-вывода на вход блока 10 связи и дешифратора 31 команды «Конец кадра. Через время 1к ЭВМ 1 выводит информационный байт, который через элемент ИЛИ 57 блока 32 ввода-вывода и коммутатор 30 (четные элементы И) проходит в блок 10 связи и дешифратор 31 команды «Конец кадра (на временной диаграмме 30/10). Аналогичным образом передаются последующие байты очередного выводимого кадра УП, а по окончании его вывода (по команде «Конец кадра) триггер 27 сигналом с де111ифратора 31 вновь устанавливается в единичное состояние, разрешая контроль канала.
Работа станка после аварийного останова по неисправности канала связи может быть возобновлена оператором после устранения причины останова.
Надежность предлагаемой системы повышена, в результате обеспечения постоянного автоматического контроля каналов ЭВМ-УСУ в процессе функционирования.
Формула изобретения
1. Система числового программного управления группой станков по авт. св. № 1004976, отличающаяся , что, с целью повышения надежности путем автоматического контроля каналов связи ЭВМ-устройства станочного управления, в нее введен генератор тактовых импульсов, а в каждый канал управления - блок ввода-вывода, в каждое устройство станочного управления введены последовательно соединенные коммутатор, регистр, блок элементов И и второй элемент ИЛИ, а также последовательно соединенные дешифратор команд, триггер и второй элемент И, выход которого соединен с первым входом блока ввода-вывода, вторым
входом блока элементов И, нулевым входом регистра, единичный вход которого соединен с выходом триггера и с первым входом коммутатора, второй вход которого подключен к первому выходу блока ввода-вывода, а второй выход - к входу дешифратора команд и входу блока связи, второй вход триггера и второй вход блока ввода-вывода соединены с вторым выходом блока формирования динамического приоритета, второй выход которого соединен с входом ЭВМ, а третий вход - с вторым выходом ЭВМ, выход второго элемента ИЛИ соединен с третьим входом первого элемента ИЛИ, а выход генератора тактовых импульсов - с вторым входом второго элемента И в каждом устройстве станочного управления.
2. Система по п. 1, отличающаяся тем, что блок ввода-вывода содержит генератор тактовых импульсов, первый триггер, два элемента И и последовательно соединенные второй триггер, третий элемент И, регистр контрольного байта и элемент ИЛИ,
выход которого соединен с первым выходом блока ввода-вывода, вторая группа входов элемента ИЛИ подключена к третьему входу блока ввода-вывода, второй выход которого соединен с выходом первого элемента И и первым входом первого триггера, второй вход
которого соединен с вторым входом блока, подключенного первым входом к первому входу второго триггера, второй вход которого соединен с выходом третьего элемента И, второй вход которого через второй
элемент И подключен к первому выходу первого триггера, подключенного вторым выходом к первому входу первого элемента И, выход генератора тактовых импульсов соединен с вторым входом первого и второго элементов И.
фие.1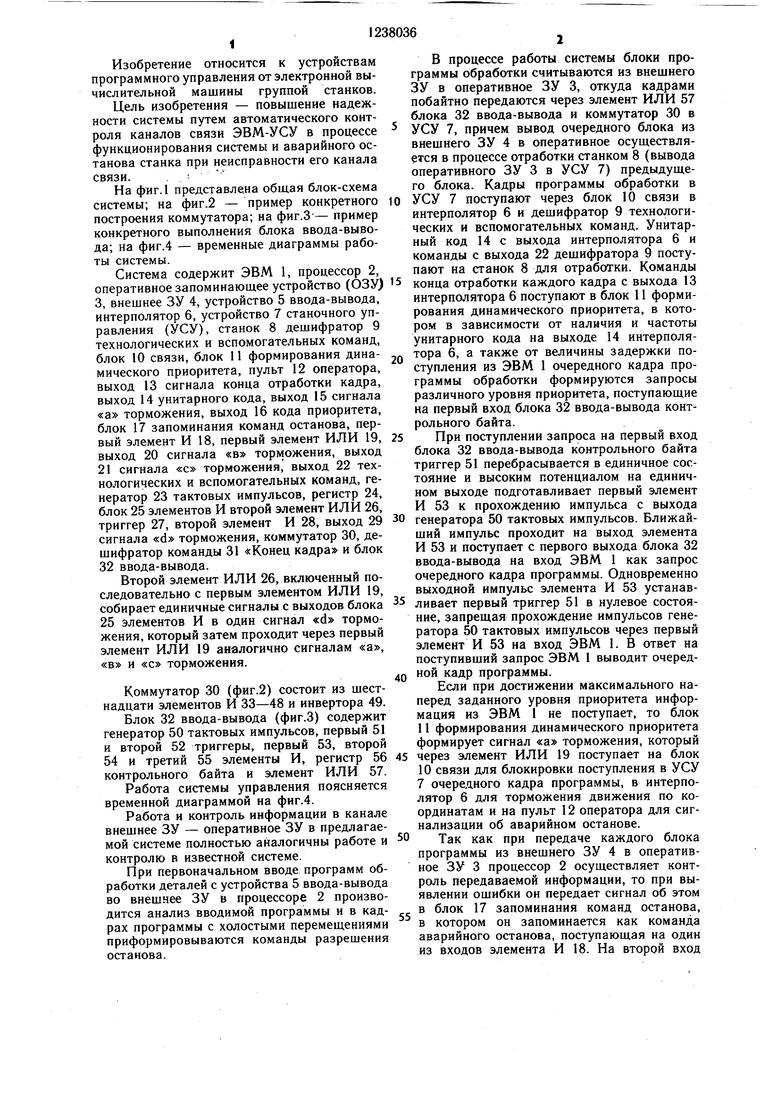
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программного управления группой станков | 1981 |
|
SU1004976A2 |
| Устройство для моделирования систем группового числового программного управления | 1981 |
|
SU1019468A1 |
| Система программного управления станками | 1985 |
|
SU1328792A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ГРУППОЙ ЕДИНИЦ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 1991 |
|
RU2020537C1 |
| Устройство для контроля и диагностики логических узлов | 1980 |
|
SU960825A1 |
| Устройство для подключения устройств ввода-вывода к многосегментной магистрали | 1987 |
|
SU1564638A2 |
| Устройство для обмена информацией | 1979 |
|
SU826328A1 |
| Устройство для отладки микроЭВМ | 1987 |
|
SU1553981A1 |
| Устройство для обмена информацией | 1986 |
|
SU1336017A1 |
| Устройство для контроля памяти | 1983 |
|
SU1280459A1 |
Изобретение относится к области программного управления станками, конкретно к устройствам программного управления от электронной вычислительной машины группой станков. Цель изобретения - повышение надежности путем автоматического контроля каналов связи ЭВМ-устройства станочного управления в процессе функционирования системы и аварийного останова станка при неисправности его канала связи. Система числового программного управления группой станков содержит электронную вычислительную машину, содержащую процессор, ОЗУ, внешнее ЗУ, устройство ввода- вывода; интерполятор, устройство станочного управления, блок формирования динамического приоритета, пульт оператора, блок запоминания команд останова, элементы И и ИЛИ, последовательно соединенные регистр, блок вентилей и второй элемент ИЛИ, триггер, второй элемент И, дешифратор команды «Конец кадра, а также логический коммутатор. При этом блок ввода-вывода в свою очередь, содержит генератор тактовых импульсов, два триггера, элементы И, ИЛИ и регистр контрольного байта. Работа станка после аварийного останова по неисправности канала связи может быть возобновлена оператором после устранения причины останова. Данная система имеет повышенную надежность за счет постоянного автоматического контроля каналов ЭВМ-устройства станочного управления в процессе функционирования системы. Изобретение дополнительное к авт. св. № 1004976. I з.п.ф-лы, 4 ил. «9 (Л to 00 00 о 00 О5
лерВому Sb/xodi/ ЗВМ1
ic I-
К 8x0ffу ёлона 10 связи Фиг. 2
фиг.З
| Кудряшов Ю | |||
| П., Кудряшов А | |||
| П., Из- вальцев Ю | |||
| И | |||
| Автоматизированная имитационно-отладочная система.-Приборы и системы управления, 1982, № 10, с | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Система числового программного управления группой станков | 1981 |
|
SU1004976A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
