ленная цель достигается тем, что система содержит ЭВМ 1, устройство 2 ввода-вьшода, программируемую матрицу 3 состояния, пульт 4 управления, коммутируемый блок 5, устройство 15 числового программного управления, управляющие механизмы 16, «датчики 17, т.е. путем организации возможности в системе программирования работы всех без исключения рабочих элементов робототехнического комплекса при связывании воедино всей гаммы основных и дополнительных элементов, участие которых в общем техноло1
Изобретение относится к вычис;ш- тельной технике, в частности к цифровым системам управления технологическими процессами.
Цель изобретения расширение управления большим количеством исполнительных механизмов при сокращении аппаратных средств управления.
На фиг.1 приведена структурная схема системы программного управления станками; на фиг.2 - функциональная .схема системы управления станками; на фиг.З - блок-схема первого устройства сопряжения и его связи с первым устройством параллельного обмена; на фиг.4 - блок-схема второго устройства сопряжения со связями с вторым устройством параллельного обмена;на фиг.З - приниципиальная схема блока команд; на фиг,6 - принципиальная схема блока управления командами; на фиг.7 и 8 - принципиальные схемы формирователей запроса А и Б на прерывание первого устройства сопряжения со- ответственно; на фиг. 9 - принципиах ь- ная схема блока управления коммутацией; на фиг.10 - принципиальная схема первого, второго и третьего коммз та- торов; на фиг.11 - принципиальная схе ма четвертого коммутатора; на фиг. 12 принципиальная электрическая схема первого блока управления; на фиг.13 - принципиальная схема второго блока управления; на фиг.14 - принципи;шь- ная схема третьего блока управления; на фиг.15 - принципиальная схема форгическом процессе может носить как систематический,так и эпизодический и случайный характер. При этом циклограммы работы этих элементов вписываются в общую циклограмму процесса именно в том месте, где предусмотрено их естественное присутствие в соответствии с предшествующим состоянием всего комплекса, что также дает возможность сократить время на изготовление деталей, тем.самым повысить производительность. 15 з.п. ф-лы,5табл., 68 ил.
мирователя требования прерывания А второго устройства сопряжения; .на фиг.16 - принципиальная схема формирователя требования прерывания Б второго устройства сопряжения и блока совпадения кодов; на фиг.17 - принципиальная схема формирователей импульсов; на фиг.18 - принципиальная схема дешифратора; на фиг.19 - принципиальная схема первой программируемой матрицы; На фиг.20 - принципиальная схема второй программируемой матрицы; на фиг.21 - принципиальная схема пульта управления; на фиг.22 - блок-схема управляющей программы технологического процесса; на фиг.23 структура программного обеспечения; на фиг.24 - модель информационных потоков системы; на фиг.25 - ст руктура матрицы состояний; на фиг.26 - формат строки матрицы состояний (МС), поступающий в центральный процессор (ЦП); на фиг.27 - формат кода команды на выходе интерполятора; на фиг.28 формат команд входных данных,вводимых в ЦП через второе устройство сопряжения; на фиг.29 - код числового набора с пульта управления;на фиг.30 формат кода координаты элемента МС; на фиг.31 - формат строки МС; на фиг.32 - блок-схема алгоритма процесса обработки команд (устройство чис- лового программного управления (УЧПУ) по табл.1); на фиг.33 - структура очереди заданий; на фиг.34 - блок- схема алгоритма формирования очереди
заданий; на фиг.35 - блок-схема алгоритма выборки задания из очереди; на фиг.36 - программный переключатель; на фиг.37 - блок-схема алгоритма выполнения команд; на фиг.38 - контрольная таблица для контроля исполнения команды управления; на «фиг.39-41 - форматы первого, второго и третьего типов команды управления; на фиг.42 - блок-схема алгоритма обработки команд второй группы из табл.1; на фиг.43 - формат команды управления первого типа; на фиг.44 - формат команды управления второ.го типа; на фиг.45 - блок-схема алгоритма выполнения, команды ввода данных с пульта управления; на фиг.46- блок-схема алгоритма исполнения команд третьей группы из табл.1; на фиг.47 - блок-схема алгоритма запуска системы в работу; на фиг.48 - строка МС режимов; на фиг.49 - строка МС прерываний; на фиг.50 - блок- схема алгоритма анализа кодов режима работы системы; на фиг.51 - формат служебной команды (СК); на фиг.52 - код Ввод управляющей программы СК; на фиг.53 - блок-схема алгоритма работы системы управления в первом режиме; на фиг.54 - формат слова ЦП; на фиг.55 - примеры кодов СК; на фиг.56 - формат пультовых команд (ПК); .на фиг.57 - код Сброс режима ПК;на фиг.58 - блок-схема алгоритма взаимодействия программно-аппаратных средств в третьем режиме работы системы; на фиг.59 - 61 - примеры кодов СК; на фиг.62 и 63 - примеры кодов ПК; на фиг.64 - блок-схема ал7 горитма процесса управления исполнением команд управления; на фиг.65 - 66 - примеры кодов команд управления
Система управления станками (далее робототехническим комплексом - РТК, фиг.2) содержит программируемый контроллер 1, построенный на базе ЭВМ, содержащий устройство 2 ввода- вывода, программируемую матрицу состояния (ПМС) 3, пульт 4 управления (ПУ) и блок 5 коммутации (РШ). Блок 2 ввода-вывода (фиг.2) содержит устройство 6 и 7 параллельного обмена (УПО), первое 8 и второе 9 устройства сопряжения (УС), канал 10 ЭВМ, перепрограммируемое постоянное запоминающее устройство (ППЗУ) 11, ЦП 12, интерполятор 13, блок 14 ввода
вывода (УВВ), УЧПУ 15, управляющие привода 16, датчики 17.
УС 8 (фиг.З) содержит регистры 18-22, четыре управляемых коммутатора 23-26 и буферный регистр (БР) 27, блок 28 команд (БК), блок 29 управления командами, блок 30 управления коммутацией (БУК), формирователь 31
запроса А на прерывание и формирователь 32 запроса Б на прерывание. УС 9 (фиг.4) содержит три блока 33-35 управления (БУ) , дешифратор 36, формирователь 37 требования прерывания А
(ФТП-А), формирователь 38 требования прерывания Б (ФТП-Б), схему 39 совмещения (СС) и блок 40 формирователей импульсов, выходной регистр 41, ре- гистр 42 состояния, БР 43.
БК 28 (фиг.5) имеет четыре триггера 44-47, четыре элемента И-НЕ 48-51 и шесть элементов И 52-55, 56, и 5б2 .
Блок 29 управления командами (фиг.6) содержит три элемента И 57 - 59, четыре элемента И-НЕ 60-63 и три инвертора 64-66.
Формирователь 31 запроса А на прерывание (фиг.7) содержит элемент И-НЕ
67, элемент И 68, DRS-триггер 69 и инвертор 70. Формирователь 32 запроса Б (фиг.8) на прерывание имеет четыре элемента И-НЕ 71-74, элемент И 75, DRS-триггер 76, диод 77 и конденсатор 78.
БУК 30 (фиг.9) содержит два триггера 79 и 80, восемь элементов И 81- 88, семь элементов И-НЕ 89-95 и четыре инвертора 96-99.
Коммутатор 23 (фиг.10) содержит восемь элементов И-ИЛИ-НЕ lbO, -lOOj, первые входы каждой группы которых являются информационными входами коммутатора 18 и подключены к информационному выходу блока 6. Коммутатор 24 (фиг.10) содержит восемь элементов ИЛИ-НЕ I0l -101j, восемь элементов И 102|-102j и восемь элемен- тов ИЛИ-103 -103J. Коммутатор 25
(фиг.10) содержит восемь элементов И-ИЛИ-НЕ 104 -104е и восемь инверторов 105 -105д. Коммутатор 26 (фиг.11) имеет восемь элементов И-НЕ 106-113, два элемента И 114 и 115 и
два инвертора 116 и 117.
БУ 33 (фиг.12) содержит три первых узла 118 управления, каждый из которых включает элементы И 119-122,
пять элементов И-НЕ 123, элементы
И 124-126, элементы И-НЕ 127-130 и DRS-триггер 131.. БУ 34 (фиг. 13) содержит четыре вторых узла 132 управления, каждый из которых включает три элемента И 133-135, четыре элемента И-НЕ 136-139 и два инвертора 140 и 141. БУ 35 (фиг.14) содержит регистр 142, дешифратор, 43, DRS- триггер 144 и инвертор 145.
ФТП-А 37 (фиг.15) содержит три элемента И 146-148, элемент И-НЕ 149, триггер 150 и два инвевтова 151 и152.ФТП-Б 38 (фиг.16) содержит DRS-триггер 153, элемент И-НЕ 154 и три инвертора 155-157,
Блок совпадения кодов (фиг.16) имеет два DRS-триггера 158 и 159, семь элементов И-НЕ 160-166, два инвертора 167 и 168,
Формирователь 31 (фиг.18) содер- 1жит четыре элемента И 169-172 и три инвертора 173-175.
Блок 40 формирователей импульсов .(фиг.17) содержит пять идентичных схем 176 формирования импульсов, каждая из которых включает четыре элемента И-НЕ 177-180, элемент И 181, инвертор 182, два диода 183 и 184 и два конде1 сатора 185 и 186,
ПМС 3 имеет две самостоятельные матрицы 187 и 188.
ПМС 187 (фиг.19) содержит дешифратор 189, первую группу элементов И вторую группу селекторов элементов И ,, группу элементов ИЛИ плексоров 193,-193
j и группу мультиный технологический процесс изготовления детали. Блок-схема УП такого технологического процесса представлена на фиг,21. Первоначально системе задаются исходные параметры, которые являются неизменными для выбранного технологического процесса изготовле10 .ния детали. Затем механизмы РТК переводятся .в- исходное положение и проверяется наличие заготовок в накопителе. Если заготовки в накопителе отсутствуют, то организуется загрузка
15 накопителя заготовками. Если заготовки в накопителе есть, то проверяется наличие заготовки в рабочем органе РТК. В случае отсутствия производится установка заготовки в рабочий ор20 ган РТК,. которая берется из накопителя заготовок, и повторно проверяется наличие заготовок в накопителе. Если же в рабочем органе заготовка есть, то проверяется на переполнение
25 накопитель деталей. Если он переполнен, то организуется замена накопителя с деталями на пустой накопитель, а если не переполнен выполняются операции изготовления детали. Пос30 ле изготовления очередной детали анализируется конец партии. Если изго- тоБление партии завершено, то организуется отправка-накопителя с послед - ней деталью партии на склад, в противном случае процесс повторяется с перевода механизмов РТК в-исходное положение.
Для того, чтобы запрограммировать описанный технологический процесс в
ПМС 188 (фиг. 20) содержит дешифра-- с лстему программирования ЧПУ введены
команды, представленные в т.абл.1. lio комаН|Цам управления система вырабатывает сигнал управления на приво- , ды механизмов РТК и на некоторые 45 устройства ПУ. По командам связи со складской системой система организует вызов и отправку транспортных средств с указгшием цели обращения на склад (получение заготовок, сдача готовых деталей и т.п.). По командам-параметрам система принимает и размещает в памяти значение координат граничных точек траектории движения некоторых механизмов РТК и геометрические параметры рабочирс накопителей. По командам переходов в УЕ система осуществляет пропуск (возврат) на некоторое количе.ство кадров в зависимости от состояниядатчика иливне связис ним .
тор 194, группу селекторов-мультиплексоров 195 -195f, и группу элементов И р.
ПУ 4 (фиг.21) содержит схему 197 входной линии, состоящую из элементов И-НЕ 198,-198, элементов ИЛИ , и элементов И-НЕ .0, группу DRS-трйггеров 201, блок 202 выработки управляющих потенциалов,содержащий элементы И 203 и 204, элемент НЕ 205, блок 206 индикации, формирователи 207 и 208 импульсов5 элемент ИЛИ 209, блок 210 ручного набора, блок 211 установки режимов работы.
В системе управления процесс управления механизмами РТК описывается внешним языком Системы ЧПУ в виде
1328792
управляющей программы (УП) как единый технологический процесс изготовления детали. Блок-схема УП такого технологического процесса представле на на фиг,21. Первоначально системе задаются исходные параметры, которые являются неизменными для выбранного технологического процесса изготовле.ния детали. Затем механизмы РТК переводятся .в- исходное положение и проверяется наличие заготовок в накопителе. Если заготовки в накопителе отсутствуют, то организуется загрузка
5 накопителя заготовками. Если заготовки в накопителе есть, то проверяется наличие заготовки в рабочем органе РТК. В случае отсутствия производится установка заготовки в рабочий ор0 ган РТК,. которая берется из накопителя заготовок, и повторно проверяется наличие заготовок в накопителе. Если же в рабочем органе заготовка есть, то проверяется на переполнение
5 накопитель деталей. Если он переполнен, то организуется замена накопителя с деталями на пустой накопитель, а если не переполнен выполняются операции изготовления детали. Пос0 ле изготовления очередной детали анализируется конец партии. Если изго- тоБление партии завершено, то организуется отправка-накопителя с послед- - ней деталью партии на склад, в противном случае процесс повторяется с перевода механизмов РТК в-исходное положение.
Для того, чтобы запрограммировать описанный технологический процесс в
с лстему программирования ЧПУ введены
команды, представленные в т.абл.1. lio комаН|Цам управления система вырабатывает сигнал управления на приво- ды механизмов РТК и на некоторые устройства ПУ. По командам связи со складской системой система организует вызов и отправку транспортных средств с указгшием цели обращения на склад (получение заготовок, сдача готовых деталей и т.п.). По командам-параметрам система принимает и размещает в памяти значение координат граничных точек траектории движения некоторых механизмов РТК и геометрические параметры рабочирс накопителей. По командам переходов в УЕ система осуществляет пропуск (возврат) на некоторое количе.ство кадров в зависимости от остояниядатчика иливне связис ним .
t Команды управления
Команды связи со складской системой
Команды- пар аме т- ры
Команды переходов в УП
(А) - адрес команды, (К) - код команды, (Р) - параметр, (Н) - номер кадра, (ij) - координаты датчика d. (фиг.26 и 29), (k) - количество кадров.
При состоянии УП команды упорядочиваются таким образом, что их последовательность описывает наиболее вероятный ход событий технологического цикла изготовления партии деталей. В нем предусматриваетсянеобходимость работы каждого механизма РТК в определенные моменты цикла. Некоторые команды в цикле изготовления одной детали воспринимаются системой не
Таблица т
Команды управления приводами:Команды связи с ПУ
(А) (К)
Команды вызова транспортных средств: Команды отправки транспортных средств
Параметры граничных точек траектории движения механизмов
Геометрические параметры рабочих накопителей:Изменение параметра
Безусловный переход к заданному кадру в прямом (обратном) направлении
Переход к заданному кадру в прямом (обратном) направлении при условии
М
(0/1)
Безусловный пропуск (возврат) на k-кадр
Пропуск (возврат на) k-кадров при .условии
М
(0/1)
как обязательные к исполнению, а ка1. предложения для исполнения. По ним система анализирует достигнутое РТК состояние и принимает решение о необходимости их исполнения. Этим обеспечивается возможность программировать работу механизмов РТК, участие которых в технологическом процессе изготовления детали носит как сисематический, так ислучайный характер.
91
Использование при программировании введенных команд (табл.1) в со-, четании с описанным принципом условного исполнения некоторых из них позволяет использовать всю гамму ис- полнительньпс элементов в любом их со .четании и последовательности,включая их в работу в соответствии с тре бованиями технологического процесса изготовления детали.
Процесс управления РТК осуществля еТся с. помощью системы программного обеспечения, которая в совокупности с аппаратными средствами составляет специализированную операционную си- стему (сое). Структура СОС представ- лена на фиг.23. Общее программное обеспечение по сути является стандартным математическим обеспечением, включенным в комплект вычислительных средств микроэвм. СОС в своем составе содержит систему программирования ЧПУ, предназначенную для разработки и отладки ЦП, супервизор прерываний, обеспечивающий переключение процессора на соответствующие сигналу прерывания программы, программы управления заданиями и управления задача- ми, которые-обеспечивают очередность выполнения команд УП (последовательное, параллельное или последователь- но-параллельное), программы управления вводом-выводом для организации процесса ввода-вывода УП, программы дешифрации команд УП и программы анализа состояния оборудования; Kofo- зые составляют программы управления оборудованием, предназначенные для выработки команд управления, программы управления потоками в сети и программы связи с центральной ЭВМ, обеспечивающие работу РТК в системе груп пового управления, программы службрзг времени, предназначенные для контроля временных интервалов работы механизмов РТК, программы обработки сбойных ситуаций, вырабатывающие реения при обнаружении сбоев в систее, сервисные программы, с помощью оторых осуществляется тестирование системы, вносятся изменения в СОС, П и так далее, программы учета сменых заданий, выполняющие функции учеа партии деталей. Функцию управления ТК в соответствии с УП под управлеием СОС осуществляют технические редства системы управления.
2879210
ЦП 12 предназначен для организации вычислительного процесса по переработке потоков информации, поступа- g ющих в систему, в команды управления, а ППЗУ 11 - для хранения программ СОС. Информация поступает и выдается из ЦП 12 через канал 10, имеющий стандартные шины данных, адреса и управ10 ления, К KaHajry 10 с одной стороны подключаются ЦП 12, ППЗУ 11, а с другой - УПО 6 и 7. Последние предназна- . чены для связи УС 8 и 9 с ЦП 12, УС 8 и 9 по командам ЦП 12 осуществляют
15 коммутацию потоков информации,циркулирующих в системе, и вырабатывают соответствующие сигналы на остальные устройства системы.УЧПУ 15 вырабатывает в соответствии с УП управляющие
20 сигналы и команды через РШ 5 на приводы 16, УС 8 и 9и1МС 3. ПМСЗпред - назначена для сбора и передачи в ЦП 12 информации о состоянии системы управления и 17 механизмов
25 РТК. ПУ 4 по отношению к пульту оператора УЧПУ 15 (не показан) выполняет роль дополнительного пульта, с помощью которого система запускается в работу.
30 Приводы 16 обеспечивают движение механизмов РТК по командам из ЦП 12 и УЧПУ 15..
Структура УС 8 разработана таким - - образом, что его совместные действия„р. с УПО 6 реализзтот функцию контроллера двунаправленной передачи разнотипной информации с радиальным ветвлением ее относительно канала 10 (фиг.З). Узлами ветвления информации
40 являются коммутаторы 23-25, БР 27, управление кото| ыми осуществляется сигналами с БУК 30. Коммутаторы 23- 25 и БР 27 совместно с входными и выходными регистрами 18 и 19 и ка- др- нальными приемопередатчиками УПО 6 образуют первый .канал ввода-вывода (1 КВВ). БК 28 служит для приема 1 КВВ и хранения СК управления, задающих режим работы УС 8 и направление коммутации информации. Блок 29 уп50
5Е
равлениЯ командами осуществляет управление записью СК в БК 28. Коммутатор 26 служит для коммутации сигналов управления УВВ 14, интерполятора 13 и БК 28 по сигналам с ПУ 4. Формиров&тели 31 4И 32 запросов на прерывание вырабатывают сигналы требования прерывания ТПР-А1 и ТРП-Б1 соответственно, которые подаются в
регистр 20 состояния УПО 6 и через соответствующие схемы УПО 6 (не указаны) вызывают переключение ЦП 12. БР 27 служит для временного хранения байта информации при вводе его в ЦП 12 через 1 КВВ. Обмен информацией между ЦП 12 и 1 КВВ производится в параллельном коде шестнадцатиразрядными словами, а между .1 КВВ и ю УВБ 14, ПМС 3 и интерполятором 13 - в параллельном коде восьмиразрядными полусловами (байтами).
Доступ к 1 КВВ осуществляется в режиме прерывания программы ЦП 12 15 по запросам от источников и приемников информации, -а предоставление 1 КВВ для передачи информации производится на основании текущего состояния УС 8, т.е. процесс передачи раз-20 нотипной информации через 1 КВВ за- синхронизирован. Синхронизация достигается за счет управления переключением ЦП 12 по ТПР-А1 на выполнение соответствующей программы су- 25 первизора прерываний. В основу процесса управления заложен принцип временной передачи ЦП 12 инициативы на прерывание программы для выполнения процедуры обмена информации с внеш- 30 мим устройством, занятым обменом информацией в режиме прерывания программы (в данном примере под внешним устройством понимается УС 8). В момент возникновения необходимости s обменяться информацией с внешним устройством, занятым вводом-выводом другого типа информации, ЦП 12 засылает в доступные регистры внешнего устройства код запроса на выработку сигнала до прерывания внешним устройством. Если внешнее устройство, не ожидает обслу- живания по очередному собственному запросу, то оно пропускает код запроса ЦП 12 на его вход и .вырабатывает 45 сигнал ТПР-А1, по которому ЦП 12 переключается на выполнение программы анализа кода запроса и далее на выполнение программы ввода-вывода информации. Если внешнее устройство Q раньше выставило собственный запрос на обслуживание, чем ЦП 12 заслал в
его код запроса, то поступивший из П 12 код запоминается в регистрах внешнего устройства, так как в ЦП 12. gg с момента вставления собственного запроса внешнее устройство вырабатывает код, соответствующий собственному запросу ТПР-А1. После его удовлетворения со стороны ЦП 12 внешнее устройство снимает собственный код запроса, пропускает код запроса ЦП 12 на его вход и вырабатывает сигнал ТПР-А1.
В УС 8 типам информации и запросам на прерывания поставлены в соответствие одни и те же коды. Информация,- проходящая через 1 КВВ, сопровождае т- ся двумя разрядами признаков (кодов) РСОО, РС01, поступающ1 х с входа блока 29 на соответствующие входы канальных приемопередатчиков УПО 6. Текущее состояние УС 8 кодируется сигналами управления - разрядами регистра состояния УПРС-1, УПРС-2, которые, поступая в блок 29, вырабатывают соответствующее коды-РСОО, РС01.
УС 9 (фиг.4) разработан по принципу локального контролл ер а управления приводами РТК и состоит из трех типов БУ 33-35, предназначенных для выработки управл.яющих сигналов на приводы, следящие с запоминанием и без запоминания состояния соответст- BerfHOi Команды управления в УС 9 поступают на ЦП 12 через вьпсодной регистр УПО 7 в виде шестнадцатиразрядного слова. Типы команд кодируются двумя разрядами регистра 42 состояния УПО 7 - РСОО, РС01. Код типа команды поступает в дешифратор 36, который вырабатывает сигналы на БУ 33-35, разрешающие занесение команды в соответствующий ее типу блок. Формирователи 37 и 38 вырабатывают сиг- ,налы ТПР-А2, ТПР-Б2, соответственно, которые подаются в соответствующие разряды регистра 42, связанные со схемами прерывания ЦП 12. ОС 39 вы- рабатьшает сигналы совмещения, необходимые для синхронизации обработки УП в интерполяторе 13 и программ сое в ЦП 12. Формирователь 40 импульсов предназначен для выработки импульсных сигналов по изменению уровня сигналов с датчиков 17.
Система управления (фиг.2) работает в следующих режимах: ввода команд ЧПУ с пульта оператора (ПО) УЧПУ 15 в режиме Ручной ввод УП в ОЗУ ЦП 12 с УВВ 14; вывод УП из ОЗУ ЦП 12 в УЧПУ 15 по запросам интерполятора 13; ввод-, в УЧПУ 15 с УВВ 14 по запросам интерполятора IS
Режим работы системы задается с помоЕдо переключателей на
13
ПУ 4 или. программы . ПК, ющих из ЦП 12.
132879214
поступа- Режимы работы системы кодируются сигналами с ПУ 4 и ПО (табл.2). Таблица 2
О 1 О 1
О 1
О 1
Соответствуют сигналам РСОО, РС01 на входе блока 29
Не используется Ввод слова УП Вывод слова УН
Ввод-вывод другого типа инфо1 маци 1
.15132879
УС 9 (фиг.4) работает в следующих режимах: выполнение команд управления первого типа; прием и выполнение команд управления второго типа; выполнение команд управления следящим приводом (третьего типа), которые |содируются сигналами РСОО, РС01 с эыхода регистра 42 (табл.5).
Таблица 5
10
За базовую структуру команд табл.1 принята структура технологических команд ЧПУ. Эти команды содержат буквенный адрес (А) и код команды (К). представляющей собой трехразрядное десятичное число. Два последние разряда служат для кодирования процедуры управления. Они преобразуются в УЧПУ 15 в двоично-десятичный код МрР-Мр1. Значением первого разряда (К) кодируется действие УЧПУ 15 по синхронизации вычислительного процесса в интерполяторе 13 с процессами,
25 i :j также поступают на вход ПМС 3 и в другие устройства уровня. Информ ционная модель ПМС 3 представляет бой МС из восьми строк и восьми ст бцов (фиг.25), элементы которой со
30 держат двоичную (0,1) информацию о состоянии датчиков 17 и указателей (, i -) (в дальнейщем датчики). И формация о состоянии датчиков пост пает в ЦП 12 в виде строк МС поток через 1 КВВ (УС 8, УПО 6) и через входной регистр УПО 7, причем на в упомянутого регистра в разряды ВВ1 ВВ08 постоянно поступает информаци d.. о датчике 17, координаты котор
35
протекающими в 2:1, 2:2, 3:2, 4 уров- 40 задаются кодом команды (поток i), нях системы. Первый разряд (К) может поступдющим из интерполятора 13 в
1ч
ПМС 3 и на вход входного регистра УПО 7 в разряды ВВ07 - ВВОО. Форма стрдки МС, поступающей в ЦП 12 чер УПО 7, представлен на фиг.26, а фор мат кода команды на выходе интерпо лятора 13.- на фиг.27. Эти команды потоком i поступают на приводы 1 РТК 2:1 уровня. Команды, относящие к.командам табл.1, поступают поток i; в ЦП 12 для последующего их вы полнения. Потоки i f и i объедин ются во входном регистре УПО 7 в слово информации, формат которого представлен на фиг.28. При выполне команды ввода данных с блока число го набора ПУ 4 (команда относится группе 1 табл.1) формат упомянут ог слова изменяется: вместо йц на
быть равен либо О, либо 1. УЧПУ 15 преобразует его в один двоичный разряд Мр9. Если Мр9 О, то процесс в интерполяторе 13 после выдачи ко- манды продолжается независимо от процессов, протекающих на перечисленных уровнях системы. Если Мр9 1, то в интерполяторе 13 вычислительный процесс приостанавливается до поступле- ния в УЧПУ 15 или сигнала из датчика 17 или сигналов из УС 9, т.е. интерполятор 13 переводится в режим ожидания Ответ по (А). После поступления названных сигналов в УЧПУ 15 вырабатывается сигнал Ответ по (А), по которому интерполятор 13 из режима ожидания переключается в режим продолжения работы.
2
16
Уровни модели 1,, 3 (фиг.24) разделены на 1:1, 1:2, 2:1, 2:2, 3:-1, 3:2 по принадлежности источников и приемников информации к УЧПУ 15 и к микроэвм, расположенной на четвертом уровне. Управление коммутацией потоков информации осуществляется на третьем уровне. Сигналы с датчиков
17 РТК, относящиеся к станочной си стеме, в виде потока i поступают в УЧПУ 15 (связь не показана). По этим сигналам в УЧПУ 15 устанавливаются в соответствующее состояние указатели (не показаны), сигналы с которых совместно с рядом других сигналов в виде потока i; поступают на вход ПМС 3 и на вход УС 8. Сигналы с датчиков 17 РТК, не относящиеся к станочной системе, в виде потока ; поступают на вход ПМС 3 и на вход УС 9. Кроме того, устройства 3:2 уровня вырабатывают сигналы с собственных указателей, которые потоком
i :j также поступают на вход ПМС 3 и в другие устройства уровня. Информационная модель ПМС 3 представляет собой МС из восьми строк и восьми столбцов (фиг.25), элементы которой содержат двоичную (0,1) информацию о состоянии датчиков 17 и указателей (, i -) (в дальнейщем датчики). Информация о состоянии датчиков поступает в ЦП 12 в виде строк МС потоком через 1 КВВ (УС 8, УПО 6) и через входной регистр УПО 7, причем на вход упомянутого регистра в разряды ВВ15- ВВ08 постоянно поступает информация d.. о датчике 17, координаты которого
задаются кодом команды (поток i), поступдющим из интерполятора 13 в
1ч
задаются кодом команды (поток i), поступдющим из интерполятора 13 в
ПМС 3 и на вход входного регистра УПО 7 в разряды ВВ07 - ВВОО. Формат стрдки МС, поступающей в ЦП 12 через УПО 7, представлен на фиг.26, а формат кода команды на выходе интерполятора 13.- на фиг.27. Эти команды потоком i поступают на приводы 16 РТК 2:1 уровня. Команды, относящиеся к.командам табл.1, поступают потоком i; в ЦП 12 для последующего их выполнения. Потоки i f и i объединяются во входном регистре УПО 7 в слово информации, формат которого представлен на фиг.28. При выполнени команды ввода данных с блока числового набора ПУ 4 (команда относится к группе 1 табл.1) формат упомянут ого слова изменяется: вместо йц на
вход входного регистра УПО 7 в разряды ВВ15 - ВВ08 подается код с числового набора ПУ 4 (фиг.29).
Для ввода строки МС в 1Щ 12 через 1 КВВ (поток i,) ЦП 12 предварительно посылает код координаты элемента МС -потоком il в разряды ВД07 - ВДОО выходного регистра 19 УПО 6, .с выхода которого он поступает на вход ПМС 3. Формат кода координаты элемента МС представлен на фиг.31. Если признак строки (ВД07) равен 1, то в 1 КВВ поступает строка МС формата фиг.26, в противном случае - строка МС формата фиг.31.
Отработка команд ЧПУ, относящихся к 2:1 уровню, осуществляется на 3:1, 2:1, 1:1 уровнях. Процесс oipa-. ботки характеризуется потоками ij ,,
-1J f
Команды ЧПУ i:, относящиеся к группам команд из табл.1, поступая на вход УС 9, вырабатывают сигнал ТПР-Б2 потока i. Одновременно с 1 на вход УС 9 поступает сигнал ij сов- .мещения (Мр9). По сигналу ТПР-Б2 ЦП 12 переключается на выполнение программ управления заданиями СОС. ЦП i 2 с помощью сигналов i сопряжения вводит информацию потоков i-, i формата фиг.28 через канал 10 как поток заданий для СОС: анализирует корректность задания и включает его в очередь. Под управлением программ управления задачами ЦП 12 выбирает из очереди очередное задание (команду ЧПУ + код датчика),фЪр- мирует по нему задачу для программ , управления оборудованием и перекл5о- чается на их выполнение. При этом ЦП 12 дешифрирует код команды ЧПУ иi переключается на выполнение соответствующей программы интерпретации команды ЧПУ в действие системы управления (выполнение команд соответствующей группы). Действия системы управления по каждой из команд табл.1 зависят от процедуры управления, закодированной кодом команды.
Очередь заданий (фиг.33) представяет собой таблицу, составленную из
2
поступивших в ЦП 12 заданий 1; формата фиг.27, расположенных в порядке поступления. В ОЗУ ЦП 12 эта таблица представляется рядом последовательных ячеек, расположенных в фиксированной области ОЗУ, начиная с адреса А.,.. Нулевые строки (1) означают, что задания, ранее записанные в эти строки, выбраны для выполнения. Конец очереди заданий намечается меткой конца.
Формирование очереди заданий состоит в том (фиг.34), что ЦП 12 после ввода очередного слова формата фиг.28 находит метку конца очереди
в таблице на фиг.31 и передвигает ее на одну ячейку ОЗУ вниз, а на ее место записывает принятое задание. Если в таблице заданий все строки до метки конца очереди нулевые (из оче5 реди выбраны все задания), то принятое задание записывается в начало очереди. После постановки задания в очередь ЦП 12 переключается на выполнение прерванной программы.
0 - Выборка задания из очереди производится в соответствии с алгоритмом, блок-схема которого представлена на фиг.35. ЦП 12 находит ненулевую строку, из очереди заданий определя5 ет, что это не метка конца очереди, и пересылает в поле программ дешифрации команд ЧПУ, после чего обнуля- ;ет ее место в таблице. Если выбранная строка содержит мет/ ку конца очереди
0 заданий (из очереди выбраны все задания) , ЦП 12 переключается на выполнение программы Диспетчер.
Дешифрация кодов команд производится по принципу программного переключения на вьтолнение программ интерпретации команд ЧПУ (фиг.36).Роль программного переключателя выполняет таблица программ .интерпретации (ТПИ), строки которой составлены из
0 команд передачи управления программами интерпретации с начальными адресами А - А„, ТПИ расположена в ППЗУ 11 с адреса . Вход в таблицу осуществляется по команде передачи управс ления, по адресу который рассчитывается как: А п, Мр8 - Мр1 х 2 + По рассчитанному АПУ ЦП 12 переклю- , чается на выполнение команды из ячейки ПЗУ 11 с этим адресом. Ею оказывается команда передачи управления, выполняя которую ЦП 12 переключается на выполнение программы интерпретации, соответствующей команде УЧПУ.
Обобщенная блок-схема алгоритма выполнения .команд первой группы представлена на фиг. 37. В конечном итоге по командам первой группы формируются команды управления, которые вьща-- ются ЦП 12 через выходной регистр
5
0
5
19
УПО 7 в потоке i совместно с сигналами i сопряжения (РСОО, РС01) в соответствующие БУ УС 9. Сначала ЦП 12 выбирает слово формата фиг.28 из поля заданий, обнуляет поле и проверяет режим работы системы управления. Если система настроена на работу в первом режиме, то ЦП 12 формиру132
ет и выдает команду управления. В дру-ю манды на время исполнения ее меха- гих режимах работы ЦП 12 проверяет низмами РТК хранятся в PC 42 и выход- достаточны ли условия для выдачи ко- ном регистре УПО 7 соответственно, манды управления. Если нет, то коман- Первый тип команды управления посту- да управления не выдается. Если же пает на вход БУ 33 и 34 УС 9, на вы- условия для выдачи команды управле- 15 ходе которых вырабатываются сигналы ния есть, то ЦП 12 сначала формирует контрольную таблицу исполнения команды управления, а затем команду управления и выдает ее потоком. Проверка
управления приводами 16 РТК.
Второй тип команды управления (формат представлен на фиг.40) коди- 1 и О
руется значениями
разрядов
условий заключается в анализе состо- 20 РС01, РСОО., PC 42, УПО 7. Этот тип
яния датчика d ,; задания (формат фиг.28). По djj (О или 1) ЦП 12 выполняет те или иные действия. Для некоторых команд первой группы проверяется состояние других датчиков. Для э-того ЦП 12 организует ввод строки МС через 1 КВВ потоком i и проверку состояния датчиков d .
Контрольная таблица (КТ) (фиг.38) служит для контроля исполнения команды управления по расчетному времени работы механизмов. Строка таблицы содержит значение расчетного ин- |тервала времени сполн работы мекоманд относится к командам управления механизмами, приводы которых выполняют команды Включить, Выключить, 1 в разрядах команды управ25 ления означает Включить,.О - Выключить. Команды управления второго типа через выходной регистр УПО 7 по-; ступают на входы регистра БУ 35 УС 9, где запоминаются на все время работы.
30 Сигналы i управления поступают на
ту с момента подачи ца его привод сигнала управления -, и код команды
ЧПУ. t
ИСПОАК.
для каждого механизма
приводы соответствующих механизмов РТК с выхода БУ 35.
Третий тип команд управления (формат представлен на фиг.41) относится ханизма РТК, отводимого ему на рабо- „ к командам управления механизмами с
приводами П1, П4, П5 в режиме слежения (следящими приводами). Если командами первого типа данные механизмы осуществляют движение до гранич- 4Q ных точек траектории, то по командам третьего типа - до любых наперед заданных точек траектории. S означает разряд команды управления скоростью перемещения (П 1 - медленное перемещение , П 5 О - быстрое перемещение) . По 1 в разрядах Сброс Тг устанавливаются в нулевое состояние триггеры соответствующих Б 33, на которые поступает сигнал i импульсных датчиков и устанавливает их в 1. Этот тип команд кодируется значениями РС01, РСОО, PC 42 УПО 7 и, аналогично командам - первого типа, поступает на вход БУ 33 УС 9, с выхо да которого сигналы i - управления поступают на соответствующие приводы 16 РТК. Разряд БДОО команд управления отводится для формирования сигналя i Ответ по (А): ВДОО 1
РТК рассчитывается предварительно. Величина „сполн. задается числом, кратным дискретам. Формирование КТ состоит из формирования строки и записи ее в КТ в порядке очередности перед меткой конца КТ (выполняется по алгоритму, сходному с алгоритмом постановки задания в очередь, фиг.34J . КТ формируется только для тех команд первой группы, которые относятся к командам запуска механизмов РТК в работу. По командам первой группы табл.1 вырабатываются три типа команд управления i.
Первый тип (формат представлен на фиг.39) относится.к командам управления механизмами, приводы которых выполняют команды Вперед, Назад, Стоп. Этот тип команд кодируется знaчeнияJ4И О и 1 разрядов РС01, РСОО, PC 2-УПО 7. Наличие 1 вразря50
55
20
дах команды управления означает включение привода .На один и тот же привод не могут одновременно поступать взаимоисключающие команды Вперед и Назад . Командой Стоп для привода является наличие О в соответствующих разрядах команды управления. Код типа команды О, 1 и код самой команды на время исполнения ее меха- низмами РТК хранятся в PC 42 и выход- ном регистре УПО 7 соответственно, Первый тип команды управления посту- пает на вход БУ 33 и 34 УС 9, на вы- ходе которых вырабатываются сигналы
управления приводами 16 РТК.
Второй тип команды управления (формат представлен на фиг.40) коди- 1 и О
руется значениями
разрядов
команд относится к командам управления механизмами, приводы которых выполняют команды Включить, Выключить, 1 в разрядах команды управления означает Включить,.О - Выключить. Команды управления второго типа через выходной регистр УПО 7 по-; ступают на входы регистра БУ 35 УС 9, где запоминаются на все время работы.
Сигналы i управления поступают на
4Q
50
4Q
55
есть Ответ.по (А), ВДОО О - Ответ по (А) нет. УС 9 обеспечивает одновременную выработку сигналов управления по командам управления первого и второго типов или по командам управления второго и третьего типов. Для формирования команд управления в ОЗУ ЦП 12 отводится три ячейки для хранения копий кодов команд, вы- данных в УС 9. Формирование команды заключается в изменении соответствующего разряда на О или 1. Команды утзравления выдаются в следующем по10
пает в ПМС 3. Выполнив эти действия, ЦП 12 формирует и передает в центральную ЭВМ системы группового управления (на фиг.2 не показана) сообщение о потребности в услугах складской системы. После удовлетворения запроса на транспортные средства ЦП 12 заносит в разряды ВД04 - ВД01 команды О, а в разряд ВДОО 1, и через УПО 7 выдает ее-в потоках i г и i (ответно (А) в УС 9). По (ВД04 - ВД01) О обнуляются соответствующие разряды регистра БУ 35 (фиг.4), а по ВДОО J
рядке: сначала ЦП 12 в разряды РСОО, is с выхода УС 9 формируются сигналы i nr-гч , ло тггт, -, .-г совмещения, по которым в УЧПУ 15 вырабатывается сигнал Ответ по (А). Команды третьей группы табл,1 в старшем разряде (К) содержат 1 (А), 20 С1 ,). По нему в УЧПУ 15 формируется сигнал- i J и i f - Мр9 1. За исключением команды ввода данных с блока числового набора ПУ 4 команды третьей группы оперируют параметрами 25 заранее заданных форматов.
Блок-схема алгоритмов выполнения команды ввода данных с блока числового набора ПУ 4 представлена на фиг.45. По этой команде формируется.команда 30 управления второго типа (фиг.40).
РС01, PC 42 УПО 7 в потоке 14 выдает код команды, а затем в разряды БД15 - ВДОО выходного регистра УПО 7 в потоке i команду управления. При одновременном выполнении команд управления сначала выдается команда второго типа (фиг.40).
Упрощенная блок-схема алгоритма обработки команд второй группы (табл.1) представлена на фиг.42. Команды этой группы кодируются с 1 в старшем разряде кода (А), (1 Р, т.е. Мр9 1. В первом режиме работы системы выполнение команд начинается с формирования кода цели установления связи со складской системой, в других режимах - с проверки достаточности условий для выполнения. Каждой команде соответствует свой код цели установления связи. Поэтому процесс формирования сводится к выборке из ППЗУ 11 соответствующего двоичного кода и включению его в команду управления. По командам второй группы ЦП 12 формирует команду управления второго типа. Формат ее представлен на фиг.44. Код цели заносится в разряды ВДОЗ - ВД01. Признак требования транспортных средств .(ТТМ) заносится в разряд ВД04. Для того, чтобы не искажались остальные разряды команды управления, процедура формирования (производится над копией команды управления, ранее выданной через выходной регистр УПО 7 в БУ 35 УС 9 (фиг.4). После команда управления .сформирована, ЦП 12 сначала в потоке выдает в выходной регистр код команды управления формата фиг.44, а затем в потоке i выдает в PC 42 код РСОО, РС01, по которому УС 9 переключается во второй режим. Код цели расшифровывается и в виде сигнала с указателей i ., постуФормирование заключается в том, что в разряд ВД08 (УК2) команды управле- ния заносится 1 (ВДОВ 1). Выдача кода команды управления производится
35 так же, как описано (алгоритм фиг.42) . По ВД08 1 в БУ 35 УС 9 вырабатывается сигнал 1- Ввести с набора, который поступает в ПМС 2. По этому сигналу вместо информации формата
40 фиг.28 на вход входного регистра УПО 7 поступает информация формата фиг.29. ЦП 12 по сигналам i сопряжения организует ввод этой информации потоком i и запись в ОЗУ. После вво45 да данных с ПУ 4 в ОЗУ, ЦП 12 аналогичным образом обнуляет соответствующий ВД08 разряд регистра в БУ 35 и формирует сигналы i J совмещения в УЧПУ 15.
50 Другие команды третьей группы выполняются по алгоритму, блок-схема которого представлена на фиг.46.
Команда-параметр записывается входом команд ЧПУ и имеет следующую
55 структуру: (Д) (1 ,) (командная часть): (А) (1 KfKj),...) (А) (1 ) (параметрическая часть), т.е. пред- . ставляет собой оследовательность од нотипных команд ЧПУ, первая из кото
пает в ПМС 3. Выполнив эти действия, ЦП 12 формирует и передает в центральную ЭВМ системы группового управления (на фиг.2 не показана) сообщение о потребности в услугах складской системы. После удовлетворения запроса на транспортные средства ЦП 12 заносит в разряды ВД04 - ВД01 команды О, а в разряд ВДОО 1, и через УПО 7 выдает ее-в потоках i г и i (ответно (А) в УС 9). По (ВД04 - ВД01) О обнуляются соответствующие разряды регистра БУ 35 (фиг.4), а по ВДОО J
Формирование заключается в том, что в разряд ВД08 (УК2) команды управле- ния заносится 1 (ВДОВ 1). Выдача кода команды управления производится
35 так же, как описано (алгоритм фиг.42) По ВД08 1 в БУ 35 УС 9 вырабатывается сигнал 1- Ввести с набора, который поступает в ПМС 2. По этому сигналу вместо информации формата
40 фиг.28 на вход входного регистра УПО 7 поступает информация формата фиг.29. ЦП 12 по сигналам i сопряжения организует ввод этой информации потоком i и запись в ОЗУ. После вво45 да данных с ПУ 4 в ОЗУ, ЦП 12 аналогичным образом обнуляет соответствующий ВД08 разряд регистра в БУ 35 и формирует сигналы i J совмещения в УЧПУ 15.
50 Другие команды третьей группы выполняются по алгоритму, блок-схема которого представлена на фиг.46.
Команда-параметр записывается входом команд ЧПУ и имеет следующую
55 структуру: (Д) (1 ,) (командная часть): (А) (1 KfKj),...) (А) (1 (параметрическая часть), т.е. пред- ставляет собой оследовательность однотипных команд ЧПУ, первая из кото23
рьгх является признаком команды-параметра. Параметр, заданный десятичным числом, поразрядно распределен в разрядах (Кз) параметрической части команды-параметра ЦП 12, приняв и расшифровав командную часть команды-параметра, настраивается на ввод в ОЗУ параметра. Для этого ЦП 12 заменяет вектор прерывания по ТПР-Б2 на век- тор, в котором указывается адрес подпрограммы ввода, выделения и записи в ОЗУ очередного разряда параметра, заносит в счетчик количества разрядов параметра число равное п - 1 (где п - количество разрядов параметров) , информирует и вьщает сигнал i j Ответ по (А). Последнее производится аналогичным образом: ЦП 12 выбирает из ОЗУ копию последней ко- манды управления, изменяет БДОО на 1 и вновь выдает это слово в потоке i в выходной регистр УПО 7. По ВДОО 1 УС 9 вырабатывает i - сигналы совмещения. Параметрическая часть команды-параметра поступает в ЦП 12 также как любая другая команда ЧПУ из табл.1 - потоками i,, i , с той лишь разницей, что по сигналу i ТПР-Б2 ЦП 12 переключается на выпол- нение подпрограммы ввода, выделения и записи в ОЗУ очередного разряда параметра. Вводимая в ЦП 12 информация соответствует формату фиг.27. Смысловая часть информации (значе- ние очередного разряда параметра) содержится в разрядах ВВОЗ - ВВОО (Мр4 - Мр1) в виде двоично-десятичного кода. ЦП 12 выделяет ВВОЗ - ВВО и приформировывает их справа к ранее принятым разрядам параметра. Полученное в результате число записывается в ОЗУ. После этого ЦП 12 анализирует состояние счетчика количества разрядов параметра. Если содержимое счетчика не равно нулю, то ЦП 12 модифицирует его на (-1) и переходит к формированию и выдаче сигнала i;. Ответ по (А). Если содержимое счетчика равно нулю (все разряды парамет pa записаны в ОЗУ) ЦП 12 восстанавливает вектор прерьшания по ТПР-В2 и переходит к формированию и выдаче сигнала i - Ответ по (А). В итоге выполнения команды-параметра в ячейках ОЗУ записан двоично-десятичный код параметра, составленный из последовательности двоично-деся- .тичных кодов разрядов (Кз) парамет28792
24
Q 152025зо о gggрической части: (Кз), (Кз) ... (Кз) Мр4 - Мр1 Мр4 - Мр1... 4)4 - Мр1.
В третьей группе команд (табл.1) имеется команда изменения параметров. По этой команде ЦП 12 выполняет программу расчета-координат точки упреждения траектории движения механизмов в режиме со слежением. Она используется для расчета координат оче- редкой точки накопителя деталей, в которую укладывается очередная деталь после ее изготовления. Если в результате расчета полученные координаты точки выходят за пределы геометрических размеров накопителя, то ЦП 12 в ij формирует и выдает команду управления второго типа с ВД09 1 (фиг.44), по которой устанавливается в 1 указатель УК 1 ВУ 35 УС 9. Сигнал с УК.1 поступает в ПМС 3 (поток i - как сигнал переполнения кассеты). Последний используется при выполнении команд второй группы В качестве сигнала с датчика.
ЦП 12 восстанавливает исходное значение координат начальной точки накопителя только после замены последнего.
Команды четвертой группы табл.1 обрабатываются ЦП 12 аналогично командам третьей группы. Параметрами команды в этом случае являются (N), (0/1 ),(ij),(k). Действия системы по командам этой группы связаны с процедурой передачи управления УП
в различные ее участки. Сначала ЦП.
С/ ш 12 вводит параметры потоками 1-, i j,
(алгоритм аналогичен.фиг.46 с той лишь разницей, что Ответ по (А) после ввода последнего параметра не формируется). Он сформирован только после окончания исполнения коман{5Ы, при необходимости потоками ij, i организует ввод строки МС (формат фиг.26) и анализ датчика и только после этого приступает к исполнению -команды. При работе системы управления в третьем режиме процедура исполнения команды сводится к нахождению участка УП, расположенной в ОЗУ, с которого необходимо продолжать вьща- чу УП в УЧПУ 15, а при работе системы управления в четвертом режиме - к. перемещениям носителя с УП, установленного на УВВ 14 в прямом или обратном направлении до необходимого уча- сткя УП.
25
Режим работы ЦП 12 выбран таким, ЧТО после включения питания ЦП 12 переключается на выполнение подпрограммы Обработка прерывания по наршению питания блока программы обработки сбойных ситуаций СОС (фиг.23) Обобщенная блок-схема алгоритма запуска системы в работу представлена на фиг.47.
Сначала ЦП 12 обнуляет ячейки ОЗ и вырабатывает сигнал Сброс, который поступает на соответствующие триггеры устройств 3;2 уровня. Зате ЦП 12 выдает i j код координаты элементов (фиг.30) стркои МС режимов. Строка МС режимов ,Хфиг.48) составлена из f wr Ha г vTf я т
сигналов Она потоком i
с указателей i и i
,... 1 1
через 1 КВВ поступае в ЦП 12, который анализирует состояние указателя Ручной ввод в разряде УВВ 14. Если на ПО УЧПУ 15 переключатель режимов установлен в положение Ручной ввод, то УВБ 14 и ЦП 12 переключается на программы настройки СОС на выполнение режима Ручной ввод. Б противном случае п УВВ 14 О ЦП 12 выдает i код координаты элементов (фиг.30) строки МС прерываний. Строка МС прерываний (фиг.49) составлена, из сигналов с указателей i ; и i - . Она аналогичным образом поступает потоком i - .в ЦП 12-. Если на ПУ 4 установлен режим работы системы, то в принятом ЦП 12 слово БВ08 1. По ВВОО 1 ЦП 12 переключается на программы настройки СОС на выполнение заданйо- го режима, а по ВВОЗ О вновь анализирует состояние указателя Ручной ввод. Режим работы системы считается заданным, если выполняется условие (Ручной ввод или Режим) 1
Первьй режим работы системы управления задается установкой переключателя режимов на ПО УЧПУ 15 в положение Ручной ввод. По этому режиму программы управления оборудованием настраиваются на безусловное выполнение ряда команд из.табл.1. Команды ЧПУ ij вводятся в ЦП 12 с ПО и обрабатываются им по алгоритму фиг.32.
Остальные режимы работы системы задаются с помощью переключателей ПУ 4. С выхода ПУ 4 сигналы, кодирующие заданный режим работы, потоком
tf
поступают на соответствующие вхо
ды устройства 3:2 уровня.
26
Упрощенная блок-схема алгоритма анализа кодов режима работы системы представлена на фиг.50. Как и в предыдущем случае, ЦП 12 вьщает в ПМС 3 ij код координаты строки режимов (фиг.48), анализирует состояние указателей ЭВМ и Ввод и переключается на программы настройки СОС на выполнение заданного режима. Если в результате анализа выясняется, что комбинация состояний указателей ЭВМ и Ввод не соответствует ни одному из режимов, то ЦП 12 переключается на одну из nporpai i обработки сбойных ситуаций (фиг.23). При настройке СОС УС 8 переключается в соответствующий режим работы. Переключение УС 8 в указанные режи- iMb происходит по СК. Формат СК пред- ,ставлен на-фиг.51. Перед выдачей СК ЦП 12 в потоке i+ в PC 1 УПО 6 в разряды РС01, РСОО посылает код 01 (код первого режима работы УС 8). Ес- ли сигналы УПРС-1, УПРС-2 на входе блока 29 (фиг.З) соответствуют 1.
то в ЦП 12 вырабатывается сигнал i
0
5
0
5
0
5
ТПР-А1, по которому ЦП ется
12 переключа-
на выполнение программы вывода СК. При этом ЦП 12 в потоке i в выходной регистр УПО 6 выдает СК.
Второму режиму работы системы управления соответствует второй режим работы УС 8. Для переключения его во второй режим ЦП 12 выдает СК, код ко- .торой приведен на фиг.52. По этой СК УС 8 вырабатывает в ЦП 12 сигналы i сопряжения, соответствующие второму режиму работы, и в УВВ 14 - сигналы i сопряжения,, управляющие его работой. Блок-схема алгоритма работы системы управления в первом режиме представлена на фиг.53. После.запуска УВВ 14 в работу оно начинает побайтно вводить УП i с носителя УП во входной регистр УПО 6 потоком i. После ввода двух байтов УП УС 8 через УПО 6 вырабатывает сигнал i ТПР-А1, по которому ЦП 12 переключается на программу обработки ТПР-А1. По этой программе ЦП 12 анализирует код типа информации в 1 КВВ и по i РСОО, РС01 00 (РС20) переключается на выполнение программы ввода слова УП.
Под управлением этой программы ЦП 12 вззйдит слово УП формата фиг.54 потоком ij в один из своих регистров и анализирует его на соответствие существующим кодам. Если ЦП 12 не
271328792
обнаруживает ошибку, то он записывает слово УП в очередную ячейку ОЗУ в о бласть, отведенную для УП, и переключается на выполнение прерванной с программы. Если слово УП введено с ошибкой, то ЦП 12 переключается на выполнение одной из программ обработки сбойных ситуаций. Под управлением этой программы ЦП .12 переключает- 10 УС 8 в первый режим, и в потоке i вьшодит СК, коды которых представлены на фиг.55. При выполнении СК (фиг.55а) в УВВ 14 потоком 4 вырабатывается сигнал Стоп, по которо- 15 му он прекращаем ввод УП. По СК (фиг.536) УС 8 переключается во второй режим работы с той лишь разницей, что носитель с :УП в УВВ .14 движется в обратном направлении до байта,вве- 20 денного в ЦП 12 с ошибкой. При этом ЦП 12 сначала выдает СК фиг.55а, а затем СК фиг.51, т.е. переводит УС 8 во второй режим работы. Введенное, в УП 12 слово УП вновь анализируется 25 на-наличие ошибки. Если ошибка есть, ЦП 12 организует п-кратное чте- этого слова, пока УП введено без ошибки или пока количество циклов повторного ввода слова УП не превы- ЗО сит п. В первом случае ЦП.12 переключается на продолжение ввода УП, а во втором - на выполнение другой программы обработки сбойных ситуаций. После ввода УП ЦП 12 переключается ос на выполнение программы Диспетчер, тора предварительно переключив УС 8 сна- токе чала в шестой режим, для чего вьщает СК фиг.55а, а затем в четвертый режим для вьщачи ПК в ПУ 4 (формат ПК пред-. ставлен на фиг.56, а код выдаваемого ПК на фиг.57).
Принцип действия системы управления при выполнении третьего режима иллюстрируется алгоритмом взаимодействия программно-аппаратных средств
то
I /
ние
проис .Пуск УЧПУ сигна рез У сигна ся в из УС грамм (фиг. УВВ режим ставл враща прогр ке в треть ды РС
По вает выдае i в враща прогр н.ят в
.УС (фиг и выр Гото батыв сигна случа дится
по не шего
40 тор н Гото тыват ных п вает
45 терпо байт выдач го пр тов УПО код выда реги этого
системы, предс.тавленным на фиг.58. УП в потоке i; вводится из ОЗУ как по инициативе ЦП 12 (работа системы р составе системы группового управ- Г1ения) , так и по инициативе УЧПУ 15 (автономный режим работы). В первом случае ЦП 12 переключает УС 8 в
,- 3
первый режим и выдает в потоке i СК,код которой представлен на фиг.59. По этой СК УС 8 вырабатывает в потоке i сигнал Пуск, по которому ПУ 15 запускается в работу. Во втором случае запуск УЧПУ.15 в работу
тора токе
переключает Готов
28
происходит после нажатия кнопкь- .Пуск на ПО УЧПУ 15. После запуска УЧПУ 15 вырабатывает в потоке i сигнал Старт, по которому УС 8 через УПО 6 вырабатывает в потоке i сигнал ТПР-Б1 в ЦП 12, и ся в режим ожидания сигнала из УС 8. ЦП 12 переключается на программу анализа строки прерьшаний МС (фиг.49). По 1 указателя Старт УВВ ЦП 12 переключает УС 8 в третий режим, выдав СК, код кот.орой пред-, ставлен на фиг.60, в потоке ij, возвращается на выполнение прерванной программы. УС 8 через УПО 6 в потоке вырабатывает сигнал ТПР-А1 и код третьего режима работы (11 вразря- ды РС0.1,. РСОО, РС20) .
По ТПР-А1 и коду 11 ЦП 12 прерывает выполнение текущей программы, выдает очередное слово УП в потоке i в выходной регистр УПО 6 и возвращается к выполнению прерванной программы. С этого момента 1 КВВ за- н.ят вводом-выводом третьего типа ин- фop laции.
.УС В настраивает коммутатор (фиг.З) на выдачу старшего байта УП и вырабатывает в .потоке i сигнал Готов, по которому УЧПУ 15 вырабатывает сигнал ЗПЛ. По этому сигналу очередной байт УП (в данном случае им оказывается старший) вводится во входной регистр интерполя- в.потоке i. Сигнал ЗПЛ в пп- i поступает в УС 8, которое
тора токе
по нему фиксирует факт выдачи стар- шего байта УЦ. и настраивает коммутатор на выдачу младшего .байта..Сигнал Готов при этом продолжает вырабатываться. После выполнения контроль- ных процедур УЧПУ 15 вновь вырабатывает сигнал ЗПЛ, по которому в интерполятрр 13 вводитс я уже младаий байт слова УП, а УС 8 фиксирует факт выдачи слова УП в УЧПУ 15, после чего прекращает выработку сигнала Го- тов, прерывает коммутатор и через УПО 6 вырабатывает сигнал Т1ГР-А1 и код состояния 11 в ЦП 12, который выдает очередное слово УП в выходной регистр УПО 6. УС 8 и УЧПУ 15 после этого повторяют свои действия; После
ввода последнего байта кадра УП УЧПУ 15 в потоке ij вырабатывает сигнал по которому УС 8 переключает - .ся в пассивный режим, вьфабатывая npl этом код,, соответствующий состоянию
29
разрядов PCP1, PCOO, PC20. На этом процесс вывода кадра УП из ОЗУ в УЧПУ 15 завершается. Если при вводе очередного байта УП УЧПУ 15 обнаружи- g вает ошибку в байте или нарушение в структуре кадра УП,- то оно вырабатывает сигналы Сбой паритет а, Сбой структуры и с бой ЧПУ, по которым устанавливаются в 1 указатели 10 УВВ, Сбой.УЧПУ, сигналы с которых поступают в потоке 1 в ПМС 3 и УС 8, По 1 Сбой УЧПУ в УС 8 . В1Ырабатьшается сигнал ТПР-Б1 и ЦП 12 переключается на программу анализа строки прерываний МС (фиг,48). В результате анализа состояния указате- , лей сбоев ЦП 12 переключается на од- ну из программ обработки сбойных ситуаций, под управлени-ем которой вы- :дает в УС 8 СК (фиг.61), по которой УС 8 вырабатывает сигнал Сброс ошибки и Сброс УВВ в потоке i. По этим сигналам УЧПУ 15 подготавливается к продолжению ввода УП, ЦП 12 производит возврат к оигабочной информации и запускает в работу УЧПУ 15. Процесс вывода УП продолжается. После отработки кадра УП УЧПУ 15 вырабатывает сигнал Старт, по которому ЦП 12 выводит из ОЗУ, а УЧПУ 15 вводит следующий кадр JTI. Процессы обработки текущего кадра и ввода очередного происходят независимо. В процессе отработки кадра УЧПУ 15 в потоке ij , .выдает команды ЧПУ, относящиеся к группам табл.1, а система управления обрабатывает.их описанным образом.
В четвертом режиме работы системы управления УП i с носителя информации посредством УВВ 14 по кадрам в потоке i
J вводится в 15, пройдя потоком 1 .через коммутатор 24 УС 8. Сигналы управления вводом, вырабатываемые УЧПУ 15, поступают в
УВВ 14 через коммутатор 26 УС 8 в потоке i . Система управления при этом обрабатывает команды табл.1 и сигналы сбоев строки прерываний МС (фиг.48). По сигнапу ТПР-Б1,выработанному по сигналу Сбой ЧПУ,
ЦП- 12 переключает УС 8 .в четвертый режим и выдает ПК, код которой представлен на фиг.62. По этой ПК система управления переключается во второй режим. Далее УП 12 переключает УС В в первьй режим и выдает СК с кодом фиг.556 (осуществляется возврат носителя УП до ошибочной инфор15
20
30
35
(0
45
50
55
9230
мации), выдает СК с кодом фиг.61, переключает УС 8 в четвертый режим и выдает ПК с кодом фиг.63, по кото рой система управления вновь переключается в четвертый режим и процесс ввода УП в УЧПУ 15 продолжается.
g 0
i-t
Управление исполнением команд ЧПУ
ij , относящихся к механизмам РТК, осуществляется в реальном масштабе времени с помощью датчиков 17. Сигналы с датчиков 17 1:2 уровня, по5 ступая в УС 9 потоком if , через УПО 7 вырабатывают сигналы TnP-A2, по которому ЦП 12 переключается на программы управления оборудованием. Блок-схема упрощенного алгоритма про0 цесса управления исполнением команд управл ения (фиг.39-41) представлена на фиг.64. Построчный ввод в . ОЗУ МС производится через 1 КВВ по СК двЬйного формата (фиг.55а и 3.0)-.
Сначала УС 8 переключается в первый режим и выдается СК очередной строки, затем ЦП 12 вводит строку МС в ОЗУ. Формирование кода прерывания заключается в том, что ЦП 12 сравни0 вает введенные строки МС (текущую
МС) .по строкам МС, введенным в прр- . дыдущем цикле обработки прерывания .по ТПР-А2 (старая МС) . В случае несовпадения содержимого соответству- .
5 ющих строк текущей и старой МС ЦП 12 присваивает несовпавшим разрядам строк код, .состоящирг из номера строки i и.номера столбца j МС, и формирует из него байт формата фиг,29.3а(0 тем ЦП 12 формирует .слово формата фиг.27, помещая в соответствующий разряд старшего байта значение из строки текущей МС, а в младший байт - сформированный код прерывания. Из
5 получаемых таким образом слов ЦП 12 формирует очередь задач управления, аналогичную фиг.33, выполняя действия, ан шогичные фиг.34. По окончании сравнения строк текущей и старой МС ЦП 12 переключается на выполнение программы дешифрации кода прерываний. Под управлением этой про- граммы ЦП 12 поочередно выбирает строки из очереди задач управления (алгоритм аналогичен фиг.35) и переключается на выполнение программ управления. Переключение ЦП 12 происходит с помощью программного переключателя, аналогичного фиг.36,
0
5
Каждому датчику d-. соответствует своя программа управления, под управлением которой ЦП 12 выполняет те или иные действия над командами управления в зависимости от состояния dj. в текущей МС. Например: если механизм П2 достиг крайнего положения Вперед, то в разряд ВД 13 команды управления первого типа ЦП 12 вводит О, после чего привод П2 выключается; если механизм П8 исполнил команду, то ЦП 12 никаких изменений в разряде ВД15 команды управления второго типа не производит; если механизм П4, запущенный в движени Назад в режиме со слежением, прошел очередной шаг траектории движе- йия, то ЦП 12 в разряд ВД11 команды управления третьего типа вводит сначала 1, а затем О, подсчитывает количество пройденных шагов и сравнивает с значением точки траектории движения, при достижении которой вводит в разряды ВД11 и ВД09 команды управления О, после чего привод П4 выключается. После внесения изменения в код соответствующей команды управления ЦП 12 обнуляет соответствующую строку КТ (фиг.38), по нулевому ее значению формирует и вырабатывает Ответ по (А) и переключает на выборку очередной строки очереди задач управления, выполняя описанные действия в том же порядке. Если очередь задач управления пуста (все задачи выполнены), то ЦП 12 переключается на выполнение прерванной программы.
Контроль исполнения механизмами РТК команд управления заключается в том, что после очередного прерывания по таймеру (не показан), ЦП 12 проверяет старшие и младши е байты КТ (фиг.38) на О. Если они содержат О, значит соответствующая команда управления исполнена. Если же О только в старшем байте, значит временной ресурс команды управления закончился, но команда по каким-либо причинам не выполнена. В этом случае ЦП 12 переключается на выполнени соответствующей программы обработки сбойных ситуаций.
В исходном состоянии системы управления переключатели установки режимов работы блока 211 установки (фиг.21) установлены в положение
Автоном
ПЛ
Вывод (в положе-
НИИ четвертого режима работы системы управления). При этом на D-входы триггеров 201 поступают О, все триггеры 201 находятся в состоянии О и с их выходов в соответствующие блоки системы поступают сигналы П. - Режим, СКС,ЭВМ, Ввод,исигна- лы 1 - Автоном, 1Ш,Вьшод.Переключатель- Автоном - СКС слузшт для включения, системы в систему группового управления (режим не рассматривается) . Во втором режиме работы системы управления переключатели ус15 тановлены в положение Ш1
Ввод
в третьем - ЭВМ, Вывод, а в четвертом - в исходном. При этом на D- и S-входы триггеров 201 поступают сигналы соответственно О и 1,
1 , О и О. Задание режима работы системы управления происходит после нажатия кнопки Режим.на блоке 211 установки. При этом на R- и С-входы триггера 201 поступают потенциальный и импульсный ригналы
ПО которым он устанавливается в 1.
По перепаду напряжения с инверсного
выхода триггера 201 формирователем
208 вырабатывается импульс установки на С-входы триггеров 201. При задании второго режима работы системы управления триггеры 201 устанавливаются в 1, О и 1 соответственно. С их выходов в.соответствующие
блоки системы поступают сигналы О , Вывод, и сигналы 1 - Режим, ПЛ, Ввод. При задании третьего режима работы системы управления триггеры 2Q1 устанавливаются в
Ч
It t II
и
О соответственно. С их
выходов в соответствующие блоки системы поступают сигнал - ПЛ, Ввод, и сигнал 1 - Режим,,
Вывод. Этот же импульс установки выдается с выхода элемента ИЛИ 209 как сигнал требования прерьшания ПУ 4 (ТПР ПУ). Сброс триггеров .201 в О происходит после нажатия кноп- ки Сброс блока 211. При этом сигналом Сброс через элемент ИЛИ .199 устанавливается триггер 201 в О, по перепаду напряжения с прямого выхода которого формирователь 207 вырабатывает импульс Сброс, который через элементы 199 поступает на R- входы триггеров 201 и устанавливают последние в О.
Четные разрядь кодов ПК (фнг.56) через элементы И-НЕ ,„, ИЛИ
33
199,-199д .подаются на R-вХоды, а нечетные - через элементы И-НЕ 200-200,подаются на S-входы триггеров
201,устанавливая их в О шш 1 при налчии 1 в соответствующих разрядах кода. Последнее происходит в /случае, когда на элементы И 203 и
НЕ 205 поступают 1 РС01, РСОО с выхода блока 29 УС 8 (четвертый режим работы УС 8) и стробирующий импульс ВД на вход элемента И 204 из УС 8, по которому с выхода блока 202 выра- батьшается строб на другие входы элементов И-НЕ 198 и 200. Например: ПК с кодом фиг.57 устанавливает в
.О триггер 201, при перекддачении которого вырабатывается описанным образом импульс Сброс, устанавли вающий в О триггеры 201; ПК с ко дом фиг.62 устанавливает- . в 1 и сбрасывает в .О, а ПК с кодом фиг.63 сбрасывает в О и устанавливает зз 1 триггеры 201 соответственно. Состояние триггеров 201 индицируется в блоке 206 индикации. Код старшего байта формата фиг.29 задается переключателями блока 210 ручного набора. Для осуществления раздельного доступа ЦП 12 к датчикам ПМС 3 имеет в своем составе двойной комплект элементов дешифрации: дешифратор 194, селекторы-мультиплексоры 195 и элементы И 196 - первый комплект (блок
торов-мультиплексоров 193 и 195. Ко координаты элемента МС формата фиг.З выдается ЦП 12 в 1 КВВ. Он поступае g в блок 188 (фиг.20) соответственно: на входы 1, 2 и 4 дешифратора 194 - ВДОО, ВД01, ВД02; на входы 1, 2 и 4 селекторов-мультиплексоров 195 - ВД04, БД05, ВД06. При этом на входы 10 элементов И 196 с выходов селекторо мультиплексоров 195 поступают сигна с тех входов, номера которых совпа дают с кодом номером строки i. Напр
мер, этот код есть i. Тогда на вхо
15 ды элементов И 196 поступают сигнал с датчиков, образующих строку режи- iMOB МС (фиг.48). Если стоока ввопит ЦП 12 вся (признак строки ВД07 - l), то дешифратор 194 на другие
20 -входы элементов И 196 подает 1 и с выходов последних в коммутатор 25 УС 8 (фиг.З) поступают все сигналы датчиков строки режимов МС. В друго случае (признак строки ВД07 0) де
25 шифратор 194 вьфабатывает 1 только на одном выходе, номер которого совпадает с -кодом на его входах. На пример, если код номера строки равен i ,а код номера-столбца j
30 111 (фиг.49), сигнал 1 с дешифр тора 194 имеется только на входе элемента И 196, на другой вход кото рого с выхода селектора-мультиплек- - сора 195 поступает сигнал Режим с
18-8, фиг.20); дешифратор 189, селек- -g триггера 201 (фиг.21). Если триггер
торы-мультиплексоры 193, элементы И 190 - второй комплект (блок 187, . фиг. 19). К одноименным входам сел Ькг торов-мультиплексоров 193 и.195 подг ключаются одни и те же датчики. Например, строка режимов МС (фиг.48) образуется подключением прямых выхо- дов триггеров 201 ПУ 4 (фиг.21) к одноименным входам селекторов-мультиплексоров 193/-193(,, , а указатели УЧПУ 15 Автомат станка j Ручной ввод, Цилиндрический пуск УЧПУ и указатели связи системы с системой группового управления (один из которых триггер 201) пoдключaюtcя к этим же входам селекторов-мультиплексоров 193 -193 , к соответственно; строка прерываний МС (фиг.49) образуется подключением соответствующих указателей УЧПУ 15 к другим одноименным входам селекторов-мультиплексоров 193;,- 93, 195„ и подключением прямого выхода триггера 201 к этому же входу селек201 установлен в 1, то в строке МС Режим 1 и на выходе элемента И 196 имеется 1. Команды ЧПУ формата фиг.26 с выхода интерполято
40 ра поступают на вход блока 187
(фиг.19), причем разряды Мр1, Мр2, МрЗ как код номера столбца j поступ ют соответственно на входы 1,2 и 4 дешифратора 189, а разряды Мр5, Мрб
45 Мр7 как код номера строки i поступаю соответственно на входы 1, 2 и 4 се- .лекторов-мультиплексоров 193, с выхо дов которых на входы элементов И 190 подаются сигналы с датчиков строки
gQ МС-, на ;п,ругие входы которых поступае 1 только с того выхода дешифратора 189, номер которого соответствует j в результате чего на вход входного регистра УПО 7 через элементы ИЛИ 19
gc в разряды ВВ15-ВВ08 поступает сиг- . нал только с дafчикa d-- (формат фиг.26). Сигналы с блока 210 ручного набора ПУ 4 (фиг.21) проходят на вхо входного регистра УПО 7 (формат
32.879234
торов-мультиплексоров 193 и 195. Код координаты элемента МС формата фиг.ЗС выдается ЦП 12 в 1 КВВ. Он поступает g в блок 188 (фиг.20) соответственно: на входы 1, 2 и 4 дешифратора 194 - ВДОО, ВД01, ВД02; на входы 1, 2 и 4 селекторов-мультиплексоров 195 - ВД04, БД05, ВД06. При этом на входы 10 элементов И 196 с выходов селекторов- мультиплексоров 195 поступают сигналь: с тех входов, номера которых совпадают с кодом номером строки i. Например, этот код есть i. Тогда на вхо15 ды элементов И 196 поступают сигналы с датчиков, образующих строку режи- iMOB МС (фиг.48). Если стоока ввопит- ЦП 12 вся (признак строки ВД07 - l), то дешифратор 194 на другие
20 -входы элементов И 196 подает 1 и с выходов последних в коммутатор 25 УС 8 (фиг.З) поступают все сигналы датчиков строки режимов МС. В другом случае (признак строки ВД07 0) де25 шифратор 194 вьфабатывает 1 только на одном выходе, номер которого совпадает с -кодом на его входах. Например, если код номера строки равен i ,а код номера-столбца j
30 111 (фиг.49), сигнал 1 с дешифратора 194 имеется только на входе элемента И 196, на другой вход которого с выхода селектора-мультиплек- - сора 195 поступает сигнал Режим с
триггера 201 (фиг.21). Если триггер
201 установлен в 1, то в строке МС Режим 1 и на выходе элемента И 196 имеется 1. Команды ЧПУ формата фиг.26 с выхода интерполятора поступают на вход блока 187
(фиг.19), причем разряды Мр1, Мр2, МрЗ как код номера столбца j поступают соответственно на входы 1,2 и 4 дешифратора 189, а разряды Мр5, Мрб,
Мр7 как код номера строки i поступают соответственно на входы 1, 2 и 4 се- лекторов-мультиплексоров 193, с выходов которых на входы элементов И 190 подаются сигналы с датчиков строки
МС-, на ;п,ругие входы которых поступает 1 только с того выхода дешифратора 189, номер которого соответствует j, в результате чего на вход входного регистра УПО 7 через элементы ИЛИ 192
в разряды ВВ15-ВВ08 поступает сиг- . нал только с дafчикa d-- (формат фиг.26). Сигналы с блока 210 ручного набора ПУ 4 (фиг.21) проходят на вход входного регистра УПО 7 (формат
35
иг.29) через элементы И 191, ИЛИ 192 в том случае, когда по команде Ввести набор из БУ 35 УС 9 (фиг.4) поступает 1 на другие входы элементов И 191 и на управляющий вход дешифратора 189, который закрывает О все элементы 190. В исходном состоянии с выходов блоков 187 и 188 в УПО 7 и УС 8 соответственно выдается нулевая строка МС (фиг.25) формата фиг.26 с кодом датчика d в разряде ВВ15.
В исходном состоянии триггер 69 ормирователя 31 (фиг.7), триггер 76 формирователя 32 (фиг.8), триггеры 44-47 БК 28 (фиг.5) и триггера 79 и 80 БУК 30 (фиг.9) УС 8 (фиг.З) находятся в О. При этом О с прямого выхода триггера 47 через элемент И-НЕ 50 поступает 1 сигнала УПРС-2 в блок 29 (фиг.6), а О с прямого выхода триггера 44 через элемент И-НЕ 94 БУК 30 (фиг.7) поступает 1 сигнала УПРС-1 в блок 29. Сигналы 1 (код 1, табл.4) УПРС-1, УПРС-2 поступают на входы элементов И-НЕ 60-63 соответственно, открывая их для прохождения сигналов с выходов РС20 УПО 6 (разряда РСОО через элементы И-НЕ 61 и 63; разряда РС01 через элементы И-НЕ 60 и 62) в канальные приемопередатчики УПО 6 и на ВХОДЫ элементов И 58 и НЕ 61. По 1 с инверсных выходов триггеров 79 и 80 БУК 30 на выходе элемента И-НЕ 94 вырабатывается сигнал.1, который, проходя через элементы НЕ, кодом 01 управления коммутацией поступает в коммутатор 25 (фиг.10) на вторые входы групп элементов И-ИЛИ-НЕ 104, причем О на первую группу элементов И, 1 на вторую группу элементов И. Послед- обеспечивает прохождение сигналов с выхода блока 188 (фиг.20) через элементы И-ИЛИ-НЁ 104, НЕ 105 на входы входного регистра УПО 6 в разряды ВВ15-ВВ08 в качестве ин- формации строки МС.
С-входы БР 27 закрыты О, поступающим с выхода элемента И 85 БУК 30. Коммутатор 23 (фиг.10) закрыт для прохождения сигналов с выходного регистра УПО 6 сигналами О, поступающими с элементов И 87 и 84 в виде кода 00 управления коммутацией на вторые входы первой и
132
32879236
второй группы элементов И-ИЛИ-НЕ 100 соответственно.
Переключение УС 8 в первый режим с работы происходит когда ЦП 12 через разряды РС01, РСОО, РС20 УПО 6 в блок 29 выдает код 01, который, проходя цепочку элементов И-НЕ 60 и 62, НЕ 64, И 58 и И-НЕ 61 и 63, И58., 10 вырабатывает 1 сигнал РС01 на выходе элемента И 58, Последний дважды инвертируется элементами НЕ 70, И-НЕ 67 формирователя -31 (фиг.7) и устанавливает триггер 6.9 в 1, про- 15 ходя через элемент И 68, который открыт сигналом 1 на его другом входе. С прямого выхода триггера 69 1 сигнал ТПР-А1 поступает на вход ответствующего разряда РС20 УПО 6 20 (фиг.З), с выхода которого через схемы прерывания (не указаны) и канал 10 поступает в ЦП 12, переключая по-- следний на выполнение программы выдачи СК.
25 В другие режимы работы УС 8 переключается из первого режима после приема СК в БК 28. Стробирующий сиг- нал вьгеода ифнормации через 1 КВВ (сигналы 1 и ВД) с выхода блока 30 управления УПО 6 поступает на схему сборки О, выполненную на элементах НЕ, 65, 66 и И 57, и на вход элемента И-59 б дока 29 (фиг. 6). С вьпсода элемента И 57 О на зремя длительности строба поступает на R-вход, а черед элемент И 68 и на С -вход триггера 69 формирователя.31 (фиг.7), устанавли- вая его в О (сигнал ТПР-А1 при этом становится О); а 1 с выхода элемента И 59 как сигнал ВДСК поступает в БК 28 (фиг.5).
Во второй режим работы УС 8 пе- . реключается по СК с кодом фиг,51. К моменту поступления СК на входы БУК 45 30 и коммутатора 26 из ПУ 4 поступают сигналы, соответствующие второму режиму работы системы управления (табл.2). Сигнал О ЭВМ 1 через - элемент И-НЕ 91 БУК 30 (фиг.9) поступает в коммутатор 26, а через элементы НЕ 96 и 97 закрывает элементы ИЛИ-НЕ 101 -lOlj для прохождения сигналов с выходов коммутатора 23 и открывает элементы И 102.-102. для gg прохождения сигналов,, вводимых с УВВ 14, на входы элементов ИЛИ
35
40
50
. коммутатора 24 (фиг.10), с выхо- дов которых сигналы поступают на второй и третий входы-выходы УС 8. Сиг- .
37
налами с ПУ 4 коммутатор 24 настраивается на передачу сигналов угу авле- ния из УС 8 в УВВ 14 и из УВВ 14 н УС 8. О сигнала Вывод запрещае-т проход сигналов Старт из УЧПУ 15 через элемент И-НЕ-106, а 1 сигнал Ввод разрешает прохождение сигнгша Старт из БК 28 УС 8 через элемент И-НЕ 107 на соответствующий вход эле мента И-НЕ 112, с выхода Старт которого через элемент И 114, открытый по другому входу сигналом 1 ПЛ, поступает в УВВ 14, Аналогичным образом происходит коммутация сигналов Вперед-назад. Кроме того, снгнал Старт с выхода элемента И. 114 инвертируется элементом НЕ 117 и поступает в УВВ 14 как сигнал ас выхода элемента И-НЕ 112 подается в прямом и инверсном (выхода элемента НЕ 116) кодах сигналами Старт и Стоп в другие блоки УС 8. Сигнал
И li
ПЛ
готовности УВВ 14 по 1 сигнала проходит через элемент И-НЕ 110 в . БУК 30 как сигнал ГТУВВ (инверсный входному сигналу готовности УЕВ 14) и через элемент И-НЕ 111, откры- . тьал 1 на другом входе, в интерполятор 13.
1 ВД12 кода СК (фиг о 52) через элемент И-НЕ 48, на другой вход которого действует 1 ВДСК поступает О на вход триггера 44 БК 28 (фиг.З) и устанавливает его в 1, а 1 ВД08 того же кода через элемен И 52, открытый 1 с прямого выход; триггера 44, поступает на R-вход триггера 45, обеспечивая установку его в 1. по 1 ВДСК. 1 сигнала Старт и О сигнала Вперед-назад с прямь1Х выходов триггеров 45 и 46 через коммутатор 25 (фиг.11) поступают в УВВ 14 и запускают его в работу в режиме Чтение-Вперед. Вместе с тем 1 с выхода триггера 44 как сигнал ВВП (ввод программы) , поступая в БУК 30 (фиг.4), подготавливает к срабатыванию элементы И-НЕ 89,. 92 и 94, И 85 и открывает элемент И 86 для прохождения сигнала с инверсного выхода триггера 79 на его R-вход. На этом переключение УС 8 во второй режим завершается. Поахе окончания действия 1 БД сигнал ВДСК становится О, а сигнал с выхода элемента И 57 блока 29 (фиг.6) становится 1 и открывает элемент И 68 формирователя 31,
1328792
38
g
так что сигнал 1 PCQ1 вновь устанавливает в 1 триггер 69, которьй вырабатывает повторно сигнал ТПР-А1. Переключение по данному сигналу прерывания используется для выполнения завершающих действий в ЦП 12 по выдаче СК.В таком состоянии блоков УС 8 1 КВВ готов к приему информации из УВБ 14 и передачи ее в ЭВМ.
Поступление первого сигнала 1 готовности из УВВ. 14 в коммутатор 26 означает, что байт информации введен и соответствующие сигналы из УВВ 14 через коммутатор 24 поступают на R-входы БР 27 (фиг.10). Сигнал О ГГУВВ из,коммутатора 26 через элементы И-НЕ 89, И 81 (на другие входы действуют 1) поступает на 0 С-входн триггеров 80 БУК 30 (фиг.9) и устанавливает первьй в 1. При этом по 1 с выхода элемента И 85 . в буферный регистр заносится поступивший с УВВ 14 код.
5
0
5
0
5
0
5
5
По )зторому сигналу О ГТУВВ триггеры 79 .и 80 устаналиваются в О и 1 соответственно. При этом на С-входы БР с выхода элемента И 85 вырабатывается О, на выходе элемента И-НЕ 94 вырабатывается О сигнала УПРС-1, по которому в коммутатор 25 с выходов элементов НЕ 98 и 99 вырабатывается код 10 управления коммутацией и первый байт УП с выхода БР через коммутатор 2-5, а второй байт с выхода коммутатора 24 поступает на входы входного регистра УПО 6, образуя слово УП формата фиг.53. Сигнал О УПРС-1 закрывает элементы И-НЕ 62, 63 в блоке 29 (фиг.6), в результате чего с их выходов в РС20 УПО 6 выдаются сигналы , РС01, РСОО, соответствующие коду второго режима работы УС 8 (табл.3 и 4). Вместе с .этим сигнал О УПРС-1 через элементы И-НЕ 67, И 68 установкой триггер 69 в 1 вырабатывает сигнал 1 ТПР-А1 (фиг.7), по которому ЦП 12 переключается на ввод слова УП, При выполнении ввода из блока управления УПО 6 поступает стробирую- щий сигнал ВВ, который аналогично сигналу БД, устанавливает триггер 69 в О. Кро,ме того, сигнал 1 ВВ, проходя через элементы И-НЕ 92, И 83 устанавливает триггер 80 в О (фиг.9), в результате чего блоки УС 8 возвращаются в состояние готовности
лриема первого байта следующего сло- УЛ.
По СК с кодом 4иг.55а УС 8 пере- слючается в пассивный режим. При этом на R-входы триггеров 45 и 46 БК 28 (фиг.5) поступают О из разрядов ВД08, ВД09 команды,обеспечивающие их установку в О по сигналу ВДСК, что соответствует выработке сигнала О, Старт и О сигнала Вперед-назад, первый из которых сигналом 1 с выхода элемента НЕ 116 коммутатора 26 (фиг.11) поступает на С-входы триггеров 44 и 47, устанавли вает их в О, а второй, пройдя через коммутатор 26, поступает в УВВ 14 с выхода элемента И 115. Кроме того, тот же сигнап О Старт с выхода элемента И-НЕ 112 через элементы И 82 и 83 поступает на R-входы триггеров 79 и 80 БУК 30 (фиг.9), обеспечивая установку и удержание их в состоянии О.
По.СК с кодом фиг;55 б УС 8 пере- ключается на второй режим с той лишь разницей, что триггер 46 по сигналу 1 из разряда ВД09 команды через открытый элемент И 53 БК 28 (фиг.5). и сигналу 1 ВДСК также устанавливается в 1, а сигналы 1 Вперед-назад, проходя через коммутатор 26, с выхода элемента И 115 (фиг.0) запускают УВВ 14 в работу в режиме Чтение-Назад.
По СК с кодами фиг.58.и 60 в БК 28 (фиг.5) по сигналам 1 из разрядов БД И,. ВД10 при наличии сигнала 1 ВДСК с выходов элементов И 57 (при наличии дополнительно сигнала 1 ЭВ из ПУ.4) и элементов И 55 и 56 вырабатываются соответственно- сигналы 1, Пуск и О, Сброс ошибки УВ, Сброс ошибки общий, которые поступают в интерполятор 13.
В третий режим работы УС 8 переключается по СК с кодом фиг.59. К моменту поступления СК на соответствующие входы БК 28, БУК 30 и коммутатора 26 из ПУ 4 поступают сигна- лы, соответствующие третьему режиму работы системы управления (табл.2). В -БК 28 (фиг.5) сигнал 1 ЭВМ подготавливает элемент И 57 к срабатыванию по сигналам 1 на других его входах. Тот же сигнал 1 ЭВМ в БУК 30 (фиг.9), проходя открытый сигналом 1 на другом входе элемент И-НЕ 91 и элементы НЕ 96, 97, становится О, Поступая как О с выходов последней группы элементов в коммутатор 24 (фиг.10), он открывает элементы ИЛИ-НЕ 101.для прохождения сигналов с выходов коммутатора 23 и закрывает элементы И 102 для прохождения сигналов с УВВ 14 на входы элементов ИЛИ 103, с выходов которых сигналы поступают на второй и третий входы-выходы УС 8. Сигналами с ПУ 4 коммутатор 26 (фиг.11) настраивается на передачу сигналов управления УВВ 14, поступающих из интерполятора 13, в УС 8, и сигналов Готов из в интерполятор 13. Сигнап 1 Вывод разрешает проход сигнала Старт из УЧПУ 15 через элемент И-НЕ 106 на вход элемента И-НЕ 112., с выхода которого прямым сигна- лом он поступает в БУК 30, а инверсным в БК 28. Сигналы , Ввод и ПЛ закрывают элементы И-НЕ 107 и И 114 соответственно, так что в УВВ 14 поступают сигналы О Старт и 1, Стоп с выходов последнего элемента и элемента НЕ 117. Аналогичным образом происходит коммутация сигналов Вперед-назад (в УВВ 14 он поступает как О, так как элемент И 115 закрыт сигналом О ПЛ). Элемент И-НЕ 111 открыт сигналом 1 с выхода элемента И-НЕ 110 так как последний закрыт сигналом О ПЛ.
в интерполятор 13 поступает сигнал О Готов с выхода элемента И-НЕ 111.
ЦП 12 переключает УС 8 в третий режим работы после запуска УЧПУ 15 (фиг.58), которое при этом вырабатывает сигнал 1 Старт. Этот сигнал через коммутатор 26 поступает в БУК 30 (фиг.9) на R-входы триггеров 79 и 80 (через элементы И 82 и 83) и подготавливает их к работе, как сигнал О Стоп с выхода коммутатора 26 поступает на С-входы триггеров 44 и 47 БК 28 (фиг.5) и подготавливает их к установке в О. Одновременно он же поступает на R-вход триггера 76 формирователя 32 (фиг.7) как импульс 1, который формируется элементами И-НЕ 72 и 73, диодом 77 и . конденсатором 78 по положительному перепаду сигнала 1 Старт, сначала в виде импульса О, а затем в виде импульсов 1, с выхода элемента
И-НЕ 71 подается на упомянутый триг- ,гер через открытый сигналом 1 Режим элементов .И 75. По сигналу 1 ТПР-Б1 ЦП 12 вьздает СК кодам (фиг.69),g предварительно проанализировав строку прерываний МЗ формата фиг.49. Поэтому перед поступлением СК в УС 8 . триггер 76 формирователя 32 (фиг.8) оказывается установленным в О сиг- ю налом 1 БВ, поступающим как О на его R-вход с выхода элемента И-НЕ 74.
1 в разряде. ВД13 кода СК (фиг.60) через элемент И-НЕ 49 БК 28 (фиг.5), 15 на другой вход которого действует сигнал Vl ВДСК, устанавливает триггер 47 в 1 и, на время действия сигнала 1 ВД, как сигнал О с выхода элемента И 54 запрещает ему 20 через элемент И-НЕ,93 у;станавливать в i триггер 79 БУК 30 (фиг.9) и закрывает элемент 67, а с выхода элемента . И-НЕ 50 БК 28 (фиг.5) продолжает выработку сигнала 1 25 УПРС-2. После установки триггерг1 47 в 1 сигнал 1 ВДП с его вьгсода открывает элемент И-НЕ 95 БУК 30 (фиг.9), на другие выходы которого действуют сигналы 1 с инверсных 30 выходов триггеров 79 и 80, и как О обеспечивает выработку сигнала 1 с выхода элемента И-НЕ 67 формирователя 31 (фиг.7). Кроме того, сигнал 1 ВДП подготавливает к срабатыванию элементы И 84 и 87 БУК 30 (фиг.9). Когда сигнал ВД станет О, то он как 1 пройдет через открытый элемент И 68 формирователя 31 (фиг.7) И установит триггер 68 40 в 1, т.е. выработает сигнал 1 ТПР-А1. Кроме того, по нему с выхода элемента И 59 блока .29 (фиг.6) вырабатывается сигнал О ВДСК, который закрывает элемент И-НЕ 49 БК 45 28 (фиг.5) и с выхода последнего как 1 открывает элементы И 54 и И-НЕ 50, тем самым подготавливая элементы И-НЕ 93 С11гналом 1 с выхода элеента И 54 для пропуска 1 БД на 50 становку триггера .79 БУК 30 (фиг.9) 1.и .элемент И-НЕ 90 для пропуса сигнапа 1 ЗИЛ на С-входы триггеров 79 и 80 и обеспечивая выработу сигнала О УПРС-2 (фиг. 5) . По- 55 ледний закрывает элементы И-НЕ 62 63 блока 29, в результате его с их выходов в канальные примопередатчики УПО 6 (фиг.З) и на
35
.
5 0 5 0 0 5
5
элементы НЕ 64, И 58 подается код 11 сигналов РС01, РСОО (код третьего режима работы УС 8, табл.3 и 4}.При этом сигнал РС01 становится О, который как 1 через элемент НЕ 70 формирователя 31 (фиг.7) поступает на вход элемента И-НЕ 67. В ,таком состоянии УС 8 готовы к приему слова УП из ЦП 12 и к побайтно14 его передаче в интерполятор 13 (фиг.58). По сигналу 1 ТПР-А1 с кодом 11 ЦП 12 выдает в 1 КВВ слово УП, которое заносится в выходной регистр УПО 6. Сигнал 1 ВД, проходя через элементы НЕ 65, И 57, поступает как О в формирователь 31 (фиг.7), где устанавтшвая триггер 69 в О, и закрывает элемент И 68, подготав- ливая его к выработке сигнала 1 для установки триггера 69 в 1 после того, как ВД станет О. Однако этого не происходит, так как сигнал 1 БД через элемент И-НЕ 93 БУК 30 (фиг.9) устанавливает триггер
79в 1, элемент И-НЕ 95 закрывается сигналом О с инверсного выхода этого триггера и вырабатывает сигнал 1, который становится третьим сигналом 1 на входе элемента И-НЕ 67 формирователя 31 (фиг.7) (сигнал
О с его выхода закрывает элемент И 68 и на С-входе триггера 69 сохранен О). Сигнал О с инверсного выхода триггера 79 БУК 30 (фиг.9) подается через элемент И 86 на его D-вход, и через элементы И 88, И-НЕ 91 и И-НЕ 111 коммутатора 26 (фиг.11) как 1 сигнала Готов поступает в интерполятор .13. В то же время сигнал 1 с прямого выхода триггера 79 БУК 30 (фиг.8) через элемент И 84 открывает вторые группы входов элементов И-1-ШИ-НЕ 100 коммутатора 23 (фиг.10) для прохождения первого байта УП (фиг.54) в интерполятор 13 через коммутатор 24 (фиг.10, код 01 управ1Ш.ния коммутацией коммутатора 23) . По сигналу Г Готов из УС 8 УЧПУ 15 вырабатьшает сигнал 1 ЗПЛ, который через элементы .И-НЕ 90, И, 81 БУК 30 (фиг.9) поступает как О на С-входы триггеров 79 и 80. После того, как Сигнал ЗПЛ станет О .(первый байт занесен в УЧПУ 15) на С-вХоды последних поступает сигнал 1, по которому триггер
80устанавливается в 1, так как на- его R-вход поступает сигнал 1 с
прямого выхода триггера 79, который устанавливается , т.е. на его R-вход действует сигнал О. При таком состоянии триггеров 79 и 80 в коммутатор 23 (фиг.10) с выходов элементов И 84 и 87 вырабатьшается код 10 управления коммутацией, по которому коммутатор 23 пропускает второй байт УП (фиг.54) в интерполятор 13 через коммутатор 24 (фиг.10).: После прихода в УС 8 второго сигнала 1 ЗПЛ по первому сигналу 1 Готов на С-входы триггеров 79 и 80 БУК 30
10
татор 26 переключает УС 8 в пассивный режим (как по окончании приема кадра УП). Дальнейшие переключения УС 8 в третьем режиме производятся согласно алгоритма фиг.55
В четвертом режиме работы системы управления УС 8 находится в исход ном состоянии. Коммутатор 26 (фиг. 1,1 сигналами из ПУ 4 (табл.2) настроен на передачу сигналов управления вводом УП .между УВВ 14 и УЧПУ 15. При этом сигналы-УЧПУ 15 Старт, ВпеУВВ 14 че
ред-назад, сигнал Готов .(фиг.9), триггер 79 остается в состо 15 рез элементы 106, 112, И 114/ янии О, а триггер 80 устанавлива- НЕ 117, элементы И-НЕ 108, 113,И 115 ется в -...
При этом на входе коммутатора 26 (фиг.10) вырабатывается код 00 управления коммутацией (с выходов элементов И 87 и 84), по которому он закрывается, а с выхода элемента И 88 БУК 30 (фиг.9) сигнал 1 через элементы И-НЕ 91 и И-НЕ 111 коммутатора 26 (фиг.11) поступает в виде сигнала О рт в интерполятор 13. Кроме того,сигнал О с вы-. хода элемента И-НЕ 95 БУК 30 (фиг.9) через элементы И-НЕ 67 (где он инвер- .тируется) и элемент И 68 устанавливаи элементы И-НЕ 110, 111 соответственно поступают в УВВ 14 и УЧПУ 15. Триггер 76 формирователя 32
20 (фиг.8) устанавливается в 1 импуль сом О ТПР ПУ, поступающим на его R-вход, и вырабатывает сигнал 1 ТПР-БГ , по которому ЦП 12 переключается на ан.ализ строки преры25 ваний МС (фиг.49). В то же время сигнал 1 (О) Режим открывает (закрывает) элемент И 75 для прохождения сигналов i Старт, О Сбой ЧПУ, Сбой станка для уста25 ваний МС (фиг.49). В то сигнал 1 (О) Режим (закрывает) элемент И 75 хождения сигналов i С Сбой ЧПУ, Сбой станка
ет триггер 69 формирователя 31 (фиг.7) 30 новки триггера 76 в 1.
в 1. В ЦП 12 через УПО 6 поступает сигнал 1 ТПР-А1 с кодом 11 режима работы УС 8. В таком состоянии блоки -УС 8 снова готовые к приему слова ЭТ1 из ЦП 12 и к побайтной его передачи в интерполятор 13 (фиг.58). После того как интерполятор 13 введет кадр УП, он вырабатывает сигнал Стоп, который поступает в УС 8 как сигнал О Старт на вход коммутатора 26 (фиг.11) и далее сигналами О Старт и 1 Стоп в БУК 30 и БК 28. По этим сигналам УС 8 переключается в пассивный режим как по СК с кодом фиг.55а, с той лишь разницей, что нет сигнала 1 ВДСК. По коду 11 сигналов УПРС-1 , УПРС-2: с выходов элементов И-НЕ блока 29 (фиг.6) поступает код РС01, РСОО из РС20 УПО 6.
Если в процессе ввода кадра УП УЧПУ 15 вырабатывает сигнал О Сбой ЧПУ, то по нему установкой триггера 76 формирователя 32 (фиг.8) (через элементы И-НЕ 71 и И 75) в 1, который вырабатывает сигнал 1 ТПР-БГ , ЦП 12 переключается на обработку сбойной ситуации, а сигнал О Старт из УЧПУ 15-через комму35
40
В четвертом режиме ра его блоки находятся в со которое они заняли в рез дыдущих действий. При эт элементов И-НЕ 62 и 63 б (фиг. 6) по коду 11 У1ГР вырабатывается код 10 РС01, РСОО, который соот четвертому режиму работы
. Переключение УС 8 в п работы происходит аналог ключению в первый с той ницей, чтов этом случае
формата фиг.51 справа пр лс ся КОД координаты элемен МС формата фиг.30 и полу образом слово выдается Ц 1 КВВ в выходной регистр
В исходном состоянии ры и регистр УС 9 (фиг.4 в состоянии О и с выхо РШ5 вырабатываются: сигн ответствующие сигналам ключение. Из РС42 УПО 7 РС01, РСОО в дешифратор поступают сигналы, образ 00. По нему на выходах И 169-172, НЕ 175 выраба ответственно сигналы 1
50
55
0
татор 26 переключает УС 8 в пассивный режим (как по окончании приема кадра УП). Дальнейшие переключения УС 8 в третьем режиме производятся согласно алгоритма фиг.55
В четвертом режиме работы системы управления УС 8 находится в исходном состоянии. Коммутатор 26 (фиг. 1,1) сигналами из ПУ 4 (табл.2) настроен на передачу сигналов управления вводом УП .между УВВ 14 и УЧПУ 15. При этом сигналы-УЧПУ 15 Старт, ВпеУВВ 14 черед-назад, сигнал Готов 5 рез элементы 106, 112, И 114/ НЕ 117, элементы И-НЕ 108, 113,И 115 ...
ред-назад, сигнал Готов рез элементы 106, 112, И 114/ НЕ 117, элементы И-НЕ 108, 113,И 115 ...
и элементы И-НЕ 110, 111 соответственно поступают в УВВ 14 и УЧПУ 15. Триггер 76 формирователя 32
(фиг.8) устанавливается в 1 импульсом О ТПР ПУ, поступающим на его R-вход, и вырабатывает сигнал 1 ТПР-БГ , по которому ЦП 12 переключается на ан.ализ строки прерываний МС (фиг.49). В то же время сигнал 1 (О) Режим открывает (закрывает) элемент И 75 для прохождения сигналов i Старт, О Сбой ЧПУ, Сбой станка для установки триггера 76 в 1.
5
0
В четвертом режиме работ.ы УС 8 его блоки находятся в состоянии, которое они заняли в результате предыдущих действий. При этом с выходов элементов И-НЕ 62 и 63 блока 29 (фиг. 6) по коду 11 У1ГРС-1, УПРС-2 вырабатывается код 10 сигналов РС01, РСОО, который соответствует четвертому режиму работы УС В.
. Переключение УС 8 в пятый режим работы происходит аналогично переключению в первый с той лишь раз- . ницей, чтов этом случае к коду СК
формата фиг.51 справа присовокулляет- с ся КОД координаты элемента строки МС формата фиг.30 и полученное таким образом слово выдается ЦП 12 через 1 КВВ в выходной регистр упо 6.
В исходном состоянии все триггеры и регистр УС 9 (фиг.4) находятся в состоянии О и с выходом БУ 33-35 РШ5 вырабатываются: сигналы О, соответствующие сигналам Стоп и Выключение. Из РС42 УПО 7 с выходов РС01, РСОО в дешифратор 36 (фиг.18) поступают сигналы, образующие код 00. По нему на выходах элементов И 169-172, НЕ 175 вырабатываются соответственно сигналы 1 - PC 0,0.
0
5
О - PC 1,0, PC О,I, PC 1,1, PC 1. Этими сигналами закрываются элементы на входах БУ 33-35 для прохождения сигналов из выходного регистра УПО 7 на вход РШ 5 (фиг.1). На входы элементов НЕ-ИЛИ 146 и 147 формирователя 37 (фиг.14) поступают сигналы 1 так что на вход элемента И 148 с выхода элемента И-НЕ 149 поступает сиг нал О, а на другой его вход и на R-вход триггера 150 действует сигнал 1 ВД, подготавливающий их к сра- .батыванию.
СС 39 (фиг.16) выполнена по прин- ципу коммутатора сигналов совмещения поступающих из интерполятора 13 и вы рабатываемых схемой. Триггер 158 вырабатывает код управления коммутацией , а триггер 159 вырабатывает сиг налы совмещения по сигналу Мр9 интерполятора 13. Коммутация сигналов совмещения производится элементами И-НЕ 161-164 и И-НЕ 165 и 166. Через элемент НЕ 168 в интерполятор 13 подает .ся сигнал блокировки. В исходной состоянии элементы И-НЕ 1б1 и 162 закрыты сигналом О с ПРЯМОГО выхода триггера 158, а сигналом. 1 с ин-. версного выхода того же триггера эле- менты И-НЕ 163 и 164 открыты, так что сигйаль: совмещения из интерполятора 13 возвращаются в него, дважды проинвертировавшись через элементы И-НЕ 163 и 164, И-НЕ 165 и 166, на R-вход триггера 159 из интерполятора 13 поступает сигнал Мр9, Когда обрабатывается команда ЧПУ, относящаяся к приводам 2:1 уровня (фиг.24),, то на входы элементов И-НЕ 163 и 164 действуют сигналы совмещения самого интерполятора 13с кодом 01, если Мр9 О, и 10, есгЕИ МрО 1.
Если интерполятор 13 выдает код команды ЧПУ из грушгы табл.1, то один из разрядов Мр8, Мр7 поступает на вход элементов НЕ 155 и 156 формирователя 38 (фиг.16) сигналом 1 и устанавливает триггер 153 в 1. С выхода этого триггера сигнал 1 через УПО 7 переключает ЦП 12 на выполнение действий по алгоритму фиг.32. Сигнал 1 с выхода элемента И-НЕ 154 подготавливает к срабатыванию триггер 158 и через развязывающий элемент 167 устанавливает его в 1, а также, в зависимости от значения сигнала Мр9, устанавливает в 1 или О триггер 159. Сигнал 1 с прямого выхода триггера 158 открывает элементы И-НЕ 161 и 162, а сигнал О с его инверсного выхода закрывает элементы И-НЕ 163 и 164. На выходах элементов НЕ-ИЛИ 165 и 166 появляютс сигналы, соответствующие установке триггера 159. Кроме того, сигнал 1 с прямого выхода триггера 158 через элемент НЕ 168 сигналом О (блокировки) поступает в интерполятор 13 и предотвращает срабатывание приводов 2:1 уровня по командам младшей тетрады команды ЧПУ (фиг.27).
При вводе команды ЧПУ (фиг.28) в ЦП 12 из УПО 7 поступает сигнал 1 ВВ, который инвертируется элемен-- том НЕ 157 (фиг.16) и .устанавливает триггер 153 в О. По сигналу .в интерполяторе вырабатываются сигналы совмещения кодом 01, а по сигналу Мр9 1 - кодом 10.
Перед вьщачей команды управления в выходной регистр УПО 7 (фиг.4) УС 9 переключается сигналами из раз- рядов Р.С01, РСОО, РС42 в соответствующий режим работы (табл.5). Первому режиму работы соответствует команда управления формата фиг.39. По сигналам 04 из РС01, РСОО дещифра- Тор 36 (фиг. 18) вырабатывает сигн а,лы- 1, PCOI на выходе элемента И 171 и РС.1 на выходе элемента НЕ 175. Первый из них поступает на входы элементов И 133 и 134 блоков 132 БУ 34 (фиг.13), а второй - на вход элементов И 119 и 120 блоков 118 БУ 33 (фиг, 12) , На другие входы этих элементов поступают сигналы команды управления. Например, если в выходной регистр УЦО 7 занесена команда, управления первого типа фиг.64 (Вперед П2, П4) , то сигнал, 1 ВД13 проходит через элемент И :133 блока 132 БУ 34 (фиг.13), а сигнал 1 БД10 проходит через элемент И 120 блока 118 БУ 33 (фиг.12). Если привод П2 находится не в конечном положении, ТО-на другой вход элемента И-НЕ 136 (фиг.13) поступает сигнал О с датчика 17 конечного положения П2 и -с. выхода элемента-И-НЕ 138 сигнал О поступает в ПМС 3, а сигнал 1 через согласующий инвертор 140 через РЩ 5 -поступает на привод 16 П2 Начинается исполнение команды - Вперед П2. Аналогично, если привод П4 находится не в конечном положении,то на другой вход элемента И-НЕ 130
(фиг.12) поступает сигнап О с датчика 17 конечного положения П4 и триггер 131 остается в состоянии О, а с выхода согласующего элемента И 125 сигнал 1 поступает через РШ 5 на привод 16 П4. Начинается исполнение команды Вперед П4 без слежения. После достижения приводами конечного положения сигналы с датчиков становятся 1, сигналы на приводы П2, П4 - О, а сигналы в ПМС 3 - сигнал 1 с датчика конечного положения П2 открывает элемент И-НЕ 136 (фиг.13), сигнап О, с которого закрывает элемент И-НЕ 138, а сигнал 1 с выхода последнего поступает в ПМС 3 и, проходя через согласующий инвертор 140, на вход привода (привод П2 выключается); аналогично сигнал 1 с датчика конечного положения П4 открывает элемент И-НЕ 130 (фиг.12) и сигнал 1 с выхода элемента НЕ-ИЛИ 123 устанавливает триггер 131 с 1, сигнап О с инверсного выхода которого закрывает схему И 125, в ПМС 3 поступает сигнал 1 с триггера 131, а на привод П4 поступает сигнап О с выхода элемента И 125 (привод П4 выключается). Одновременно или последовательно сигналы О с выхода элемента И 135 (фиг.12) и О с инверсного выхода триггера 131 (фиг.12) устанавливают в 1 триггер 150 формирователя 37 (фиг.14), сигнал 1 ТПР-12 с выхода которого переключает ЦП 12 на выполнение программ управления оборудованием (фиг.64). В итоге действий ЦП 12 |по апгоритму фиг.63 в выходной регистр УПО 7 заносится код команды управления О в разрядах вВД15-ВД01 в разряде ВДОО (еспи приводы П2,П4 исполнили команду управления одновременно) или последовательно (по ере исполнения приводами П2, П4 команды управления) две команды управения с 1 в том разряде, который соответствует приводу еще не завершившему исполнение команды, причем в разряде ВДОО первой из этих команд поступает сигнал О, а сигнал 1 - во второй команде. Сигнал О из разряда ВД13 закрывает элемент И 133 (фиг.13), в результате чего элементы И-НЁ 136 и 138 (фиг.13) закрываются и в формирователь 37 с выхода эле- кента ИЛИ 135 поступает сигнал 1. Аналогично сигнал О из разряда
ВД10 закрывает элемент И 120 (фиг.12), в результате чего закрываются эле- . менты И 125 и И-НЕ 130, сигналом 1 подготавливается к срабатыванию триггер 131, который остается в состоянии 1. Для установки его в О ЦП 12 переключает УС 9 в тре тий режим работы и вьщает команду управлег ния третьего типа (формат фиг.41) с 1 в разряде ВД11. Переключение УС 9 в третий режим работы происходит при поступлении сигналов кода 11 из разрядов РС01, РСОО, PC 42
УПО 7. По этим сигналам дешифратор 36 (фиг.18) вырабатывает сигнал 1 PC 1,1 и PC,1.
Сигнал 1 ВД11 через открытый сигналрм 1 PC 1,1 элемент И-НЕ 129,
как сигнал О, через элемент ИЛИ 122 поступает на вход триггера 131 и устанавливает последний в О, в результате чего с его выходов сигнал О закрывает элементы И 124 и
125,а сигнал 1 подготавливает элемент И 146 формирователя 37 (фиг.15) к с{)абатыванию. При выдаче любой из команд управления из УПО 7 в формирователь 37 на R-вход триггера 150 и вход элемента И 148 поступает сигнал О ВД, который сбрасывает триггер 150 и подготавливает его к последующему срабатыванию по С-вхо- ду. После того, как этот сигнал ВД становится 1, элемент И 148 открывается и, если на другой его вход действует сигнал 1 (сработали еще датчики 17), он пропускает его на установку триггера 150 , Сигнал 1 в разряде ВДОО управ
ляющей команды по сигналу 1 ВД
через элемент И-НЕ 160 формирователя - 39 (фиг.16) устанавливает триггер 159 в О. При этом, если он установ
лен в 1 при поступлении команды ny табл.1 и с выходов элементов И-НЕ 165 и 166 в интерполятор 13 поступают сигналы кода 10, по которо- му интерполятор 13 приостановил вычислительный процесс, то с установкой триггера в О в интерполятор 13 начинают поступать сигналы кода 01, по которым интерполятор .13 пе- реходит к обработке следующей, крманды ЧПУ. В этом случае сигналы
О Мр8, Мр7 (фиг.27) через элементы НЕ 155 и 156, И-НЕ 154 устанавливают триггер 158 в О, в результате чего сигналы СС 39 устанавливаются в
49 1328792
исходное состояние, а ЦП 12 обнули- фиг.6 (Назад П4
лой скоростью) УС 9 в третий ре
ет разряды выходного регистра и РС01 РСОО РС2 УПО 7 и переключает УС 9 в исходное состояние.
Если после переключения УС 9 в первый режим работы, в выходной регистр УПО 7 заносится команда управления первого типа (фиг.65, Назад П2, П4), то сигнал 1 ВД08 проходит через элемент И 134 блока 132 БУ 34 (фиг.13)5 а сигнал 1 ВД09 проходит через элемент И 119 блока 118 БУ 33 (фиг.12). При этом, если привод П2 находится не в начальном положении, то на другой вход элемента И-НЕ 137 (фиг.13) поступает сигнал О с датчика 17 начального положения П2, с выхода элемента И-НЕ 139 сигнал О поступает в ПМС, а сигнал 1 через согласующий инвертор 141 чере,з РШ 5 поступает на привод 16 П2. Начинает- ся исполнение команды Назад П2. Аналогично, если привод П4 находится не в начальном положении, то на другой вход элемента И-НЕ 127 (фиг.12) поступает сигнал О с датчика 17 начального положения П4. и триггер 131 остается в состоянии О, а с выхода согласующего элемента И 124 сигнал 1 поступает через РШ 5 на привод 16 П4. Начинается исполнение команды Назад П4 без слежения. После достижения приводами начального
положения сигналы с датчиков становят-35 процессов переключения при- ся 1 , сигналы на приводы П2, П4 - О, а сигналы в ПМС 3 - 1. Сигнал 1 с датчика начального положения П2.открывает элемент И-НЕ 137 (фиг. 13) ,
вода. Однако, если время обработки прерывания по ТПР-А2 превьшает допустимое , то привод .П4 успевает временно отключиться. Этим исключается
Q бесконтрольное исполнение команды. Дальнейший процесс выработки сигналов в УС 9 совпадает с описанным.
сигнал которого закрывает элемент И-НЕ 139, а сигнал 1 с выхода последнего поступает в ПМС 3 и, проходя через согласующий инвертор 141, на вход привода (привод П2 выключается). Аналогично сигнал 1 с датчика начального положения П4 открывает элемент И-НЕ 127 (фиг.12) и сигнал 1 с выхода элемента И 123 устанавливает триггер 131 в 1, сигнал О инверсного выхода которого закрывает схему И 124, в ПМС 3 поступает .сигнал .1 с триггера 131, а на привод П4 поступает сигнал О с выхода элемента И 125 (привод П4 выключается). Дальнейший процесс выработки сигналов в УС 9 совпадает с описанным.
Перед вьщачей команды управления третьего типа, например, с кодом
50
фиг.6 (Назад П4
о слежением с малой скоростью) ЦП 12 переключает УС 9 в третий режим (табл.5).
По сигналу 1 ВД09 привод П4 включается на исполнение команды Назад (фиг.12), сигнал 1 ВД08 . через открытые схемы И 121 и 126 настраивает привод на работу с малой скоростью. Во время движения импульсный датчик 17 вырабатывает импульс 1 на вход элемента И-НЕ 108, на другой вход которого поступает сигнал 1 PC 1,1. По каждому из
этих импульсов сигнал О с выхода элемента И-НЕ 128 через элемент И 123 устанавливает триггер 131 в 1, сигналами которого на привод П4 вырабатываются сигналы О, а в
.формирователе 37 (фиг.15) устанавливается в 1 триггер 150 и вырабатывается сигнал 1 ТПР-А2, переключающий ЦП 12 на вьшолнение программ управления оборудованием
(фиг,64). Для установки триггера
131 в О (.12) ЦП 12 вьщает ко-., манду управления с кодом фиг.68. После установки триггера 131 в О выработка соответствующих сигналов 1
на привод П4 возобновляется. Вслед за командой управления с кодом фиг.68 ЦП 12 выдает команду с кодом фиг.67. Движение механизма при этом не приостанавливается из-за инерци° ° ™ процессов переключения при-
вода. Однако, если время обработки прерывания по ТПР-А2 превьшает допустимое , то привод .П4 успевает временно отключиться. Этим исключается
бесконтрольное исполнение команды. Дальнейший процесс выработки сигналов в УС 9 совпадает с описанным.
Команды управления второго, типа записываются в регистр 142 БУ 35
(фиг. 14) из выходного регистрами 7 по сигналу 1 PC 1,0, поступающему на С-входы регистра с выхода элемента И. 170 дешифратора 36 (фиг.18). Этот сигнал вырабатывается после занесения в разряды РС01, РСОО, РС2 УПО 7 кода 10. При этом в регистр 142 (фиг.14) записываются коды, соответствующие сигналам на его R-BXO- дах. Например, при наличии сигнала
1 в разряде ВД15 в коде команды . управления (фиг. 40) в старший разряд/ регистра 142 записывается 1 и с выходов его триггера сигналы кодом 10 поступают через РШ 5 на вход
ривода П8, который исполняет команду Включить, после чего привод остается во включенном состоянии до прихода сигнала О в том же разряде другой команды, по которому в старий разряд регистра 142 записывается О и на вход привода П8 с выхода триггера старшего разряда через РШ 5 поступают сигналы кодом 01, по ко- ю торым привод исполняет команду Выключить. Приводы Пв-ПЮ управляются кодовыми сигналами, а приводы П11-П13 - одинарными сигналами с соответствующих выходов регистра 142. 15 Привод П13 управляет механическим атчиком-щупом, результат работы которого запоминается в виде состояния триггера 144, который устанавливается в 1 сигналом 1 с наконеч- 20 нйка щупа датчика 17, поступающего на R-вход триггера, предварительно установленный в О сигналом 1 на С-входе, через согласующий элемент 145.25
Три последних разрядных триггера регистра используются в качестве указателей УК1, УК2, ТГМ, сигналы с прямых выходов которых поступают вПМСЗ.
Сигнал с инверсного выхода указа- 30 информационным входом с информацион-
теля ТГМ управляет работой дешифратора J43, на вход которого подается код цели связи со складской системой (фиг;43). С выхода дешифратора сигналы кода цели поступают в ПМС 3 .После исполнения команд управления второго типа срабатывают соответствующие датчики 17, сигналы с которых поступают на формирователи 40 (фиг. 1 7) .По перепадам напряжения сигналов с датчиков формирователи вырабатывают импульсы О, по которым формируется сигнал 1 ТПР-А2 в формирователе 37 (фиг.15), переключающий ЦП 12 на выполнение программы управления оборудованием.
Формула изобретения
1. Система программного управления станками, содержащая датчики, устрой- .ство ввода-вывода, устройство числового программного управления, приводы и блок коммутации, соединенный первым командным входом с командным выходом устройства числового программного управления, первым управляющим выходом с первым управляющим входом приводов, подключенных вторым управ
ляющим входом к первым управляющим выходам устройства числового программного управления, подключенного первым информационным выходом к первому информационному входу устройства ввода-вывода, а управляющим входом - к первому управляющему выходу устройства ввода-вывода, соединенного пер-. вым инфор 1ационно-управляющим входом-выходом с информацоинным входом системы, отличающаяся тем, что, с целью расширения управления большим количеством исполнительных механизмов при сокращении аппаратных средств управления, введены пульт управления и программируемая матрица, соединенная первым информационным входом с информационным выходом устройства ввода-вывода,подключенного первым управл ян5щим входом к управляющему выходу пульта управления, вторым управляющим входом - к командному выходу устройства числового программного управления, группой третьих управляющих входов к информационному выходу датчиков и второму информационному входу, программируемой матрицы, соединенной третьим
5
0
Q
5
5
ным выходом пульта-управления, подключенного командным входом к первому командному выходу устройства ввода-вывода, соединенного вторым управляющим выходом с первым управляющим входом программируемой матрицы, подключенной вторым управляющим входом к третьему управляющему выходу устройства ввода-вывода, соединенного четвертым управляющим выходом с первым управляющим входом пульта управления, подключенного вторым управляющим входом к пятому управляющему выходу устройства ввода-вывода,со- единенного командным выходом с первым командным входом блока коммута- - ции, подключенного вторым командным входом к второму командному выходу устройства ввода-вывода, соединенного третьим командным входом с командным выходом устройства числового программного управления, подключенного первым управляющим входом-выходом к первому управляющему входу- выходу устройства ввода-вывода, со- единенного четвертым управляющим входом с BTopbiM управляющим выходом устройства числового программного управления, подключенного вторым управляющим входом-выходом к второму управляющему выходу-входу устройства ввода-вывода, подключенного вторым информационным входом к первому информационному выходу программируемой матрицы, соединенной третьим управляющим входом с командным выходом устройства числового программного управления, подключенного вторым информа- ю да, информационный выход, управляющий
ционным выходом к четвертому информационному входу программируемой матрицы, подключенной вторым информационным выходом к третьему информационному входу устройства ввода-выво- 15 дом-выходом и Сбросовым входом втода, соединенного вторым информационно-управляющим входом-выходом с вторым информационно-управляющим входом- выходом системы, блок коммутации соединен вторым управляющим выходок с третьим управляющим входом приводов,
рого устройства сопряжения, подключенного вторым информационным входом устройства ввода-вывТ)да, первый управляющий выход, первый управляющий 20 вход, второй управляющий вход, первый информ-ационный выход, второй ин формационный вьгход, второй управляющий выход второго устройства сопряжения соответственно подключены к
2. Система по n.l, отличаю- я с я тем, что устройство ввода-вывода содержит два устройства па- 25 первому управляющему выходу, к чет- раллельного обмена5два устройства совертому управляющему входу, к втором управляющему входу, к второму команд ному выходу, к информационному выходу и к второму управляющему выходу устройства ввода-вывода.
пряжения, первый информационный вход- выход первого устройства параллельно- го обмена соединен с первым информационным входом-выходом устройства ввода-вывода, второй информационный и первый управляющий вход-выход первого устройства параллельного обмена подключены к соответствующим первому информационному выходу и первому управляющему входу-выходу первого устройства сопряжения, соединенного первым информационным входом с третьим управляющим выходом устройства ввода-вывода и первым командным выходом первого устройства параллельного . обмена, подключенного сбросовым выходом к сбросовому входу первого устройства сопряжения, связанного вторым информационным входом, вторым управляющим входом, третьим управляющим входом, третьим информационным входом и вторым информационным выходом соответственно с первым информационным входом, с первым управляющиг входом-выходом, вторым управляющим : входом-выходом, с вторым информационным входом и с командным выходом устройства ввода-вывода, а управляющем входом и управляющим выходом первое устройство сопряжения соединено соответственно с первым управляющим входом и четвертым управляющим выхо- ом устройства ввода-вывода, первый
информационный. вход второго устройства параллельного обмена соединен с вторым информационным входом устройства ввода-вывода, второй информационный вход второго устройства параллельного обмена подключен к командному входу и третьему информационному входу устройства ввода-вывовход-выход, синхронизирующий выход второго устройства параллельного обмена соединены соответственно с первым информационным входом, управляющим вхорого устройства сопряжения, подключенного вторым информационным входом устройства ввода-вывТ)да, первый управляющий выход, первый управляющий вход, второй управляющий вход, первый информ-ационный выход, второй информационный вьгход, второй управляющий выход второго устройства сопряжения соответственно подключены к
первому управляющему выходу, к чет-
первому управляющему выходу, к чет-
вертому управляющему входу, к второму управляющему входу, к второму командному выходу, к информационному выходу и к второму управляющему выходу устройства ввода-вывода.
3, Система по п.2, о т л и ч а ю- щ а я с я тем, что первое устройство сопряжения содержит четыре коммутатора, буферный регистр, блок ко-манд, блок управления командами,блок управления коммутацией, два формирователя запроса на прерывание, ин- формационные входы первого коммутатора соединены с первым информационным входом первого устройства сопряжения и выходы первого коммутатора подключены к первому информационному входу второго KOMt-iyTaTopa, подключенного выходом к информационным входам
буферного ре гистра, к первым информационным выходам первого устройства сопряжения, к командному выходу первого устройства сопряжения, соединены с выходом третьего коммутатора, выходом буферного регистра подключены к первым информационным выходам третьего коммутатора, подключенного вторыми информационными входами к третьему информационному входу первого устройства сопряжения, а первым и вторый командными входами к перво- Nry и второму командным выходам блока управления коммутацией, соединенного- третьим командным выходом с входом
сброса буферного регистра, четвертым и пятым командными выходами - с первым и вторым управляющими входами второго коммутатора, шестым и седьмым командными выходами - с первым и вторым управляющими входами первого коммутатора, соединенного входом с ин-- .формационным входом блока команд,под- |ключенного управляющими входами-выходами к третьим управл}пощим входам-выходам первого устройства сопряжения, первым управляющим входом - к первому управляющему входу первого устройства сопряжения, вторым управляю- щим входом - к входу сброса первого устройства сопряжения, третьим управляющим входом - с первым управляющим выходом четвертого коммутатора,первым и вторым управляющими выходами - с первым и вторым входами блока управления коммутацией, соединенного третьим входом с вторым управляющим выходом блока команд, подключенного третьим управляющим выходом к чётвер- тому входу блока управления коммутацией, четвертый и пятый управляющие выходы блока команд соединены с вторым и третьим управляющими входами четвертого коммутатора соответствен- но, подключенного группой управляющих входов к первым управляющим входам первого устройства соединения, первыми и вторыми управляющими входами-выходами к первым и вторым управляющим входам-выходам первого устройства сопряжения соответственно, третий управляющий вход блока команд соединен с первым выходом блока управления командами, подключенного вхо дами-выходами к входам-выходам первого устройства сопряжения, соединенного выходами сброса с входами сброса блока управления командами, подключенного вторым входом к перво- му управляющему входу, а вторым выходом - к второму управляющему входу первого формирователя запроса прерывания, соединенного третьим управляющим входом с восьмым управляющим
выходом блока управления коммутации, подключенного девятым управляющим выходом к первому управляющему входу первого формирователя запроса, соединенного четвертым управляющим входом с третьим управляющим выходом -блока управления командами, пятый и шестой управляющие входы блока управления коммутацией соединены соответствен
о Q g Q
5
но с первым и вторым управляющими входами первого устройства сопряжения, седьмой и восьмой управляющие входы блока управления коммутации подключены к соответствующим входам сброса блока управления командами, девятый управляющий вход блока управ ления коммутацией соединен с вторым управляющим выходом четвертого коммутатора, соединенного третьим управляющим выходом с десятым управляющим входом блока управления коммутацией и первым управляющим входом второго формирователя запроса на прерывание, подключенного вторым управляющим рходом к восьмому управляющему входу блока управления коммутацией, соединенного десятым управляющим выходом к четвертому управляющему входу четвертого коммутатора,- первые и вторые управляющие входы второго формирователя запроса на прерывание соединены с вторыми и четвертыми управляющими входами первого устройства сопряжения, выход второго формирователя со-; единен с выходом первого формировате ля .и подключен к первому управляющему выходу первого устройства сопря- жения, второй управляющий вход блока команд подключен к третьему управляющему входу второго формирователя запроса на прерывание, вторые информационные входы второго и третьего коммутаторов подключены соответственно к второму и первому информационным входам первого устройства сопряжения, седьмой вход блока управления коммутацией подключен к четвертому управляющему выходу первого устройства сопряжения.
4. Система по п.2, о т л и ч а ю- щ а я с я тем, что блок команд содержит четыре элемента И, шесть элементов И-НЕ и четыре DRS-триггера подключенных инверсными D-входами к второму управляющему входу блока команд, С-вход первого триггера подключен к С-входу второго триггера и является первым управляющим входом блока, D-входы первого и второго триггеров зазештены; а инверсные R- входы подключены к.выходам первого и второго элементов И-НЕ соответственно, первые входи которых объединены, подключены к С-входам третьего и четвертого триггеров, к первому входу шестого элемента И-НЕ, к первому входу четвертого элемента И
и являются .третьим управляющим входом блока команд, вторые входы первого и второго элементов И-НЕ являются входами группы информационных входов блока, прямой выход первого триггера подключен-к первым выходам первого и второго элементов И и является первым управляющим выходом блока команд, вторые входы элементов И являются входами группы информационных входов блока команд, а выходы первого и второго элементов И подключены соответственно к D-BXO- дам третьего, четвертого триггеров, R-входы которых подключены к источнику напряжения логической единицы, выходы третьего и четвертого триггеров являются соответственно четвертым и пятьгм управляющими выходами блока, выход второго триггера является вторым управляющим выходом бло- ка и. соединен с первыми входами третьих элементов И и И-НЕ, подкхвдченны вторыми входами к выходу второго эле мента И-НЕ, вьгход третьего элемента И является третьим управляющим выходом блока, а выход третьего элемента И-НЕ - шестым управляющим выходом блока, второй вход шестого элемента И является входом группы управляющих входов-выходов блока, а выход - соединен с первыми входами четвертого и пятого элементов ИЛИ, первые входы которых являются входами, а выходы - выходами группы управляющих входов-выходов блока, второй вхо четвертого элемента И является входом, а выход - выходом группы информационных входов-выходов блока, тре- тий вход четвертого элемента И является управляющим входом блока.
5. Система по п.2, о т л и ч а ю- щ а я с я тем, что блок управления командами содержит три элемента И, четыре элемента И-НЕ и три эпе лекта НЕ, входы первого элемента И подключены к выходам соответственно первого и второго элементов НЕ, по дкхсю- ченных. входами к сбросовым вxoдa блока, первый вход второго элемента И подключен к выходу третьего элемента НЕ, а его вьгход соединен с первым выходом третьего элемента И, соединенного вторьм вкодом с входом первого элемента НЕ, выход третьего элемента И является первым управляющим вь гходом блока управления командами,, первые входы первого и второго эле
5 Q „
5
0
5
ментов И-НЕ объединены и являются- вторым управляющим входом блокгГ управления, вторые входы элементов И-НЕ являются первьми управляющими входами-выходами блока управления,а их выходы подключены соответственно к первым входам третьего и четвертого элементов.И-НЕ, вторые входы которых объединены и являются первым управляющим входом блока управления командами, выход третьего элемента И-НЕ соединен с входом третьего элемента НЕ, а выход четвертого элемента И-НЕ соединен с вторым входом второго элемента И, и вместе с выходом третьего элемента И-НЕ являются вторым управляющим выходом.
6. Система по п.2, о Т л и ч а ю- щ а я с я тем, что блок управления коммутацией включает два БЕЗ-тригге- ра, восемь элементов И, семь элементов И-НЕ и четыре элемента НЕ С-вхо- ды триггеров подключены к выходу первого элемента И, подключенного входами к выходам первого и второго элементов И-HEj входы которых являются первьм, девятым, четвертым, шестым управляющими входами блока, прямой выход первого триггера соединен с R-входом второго триггера и с первыми входами второго и третьего элементов И, второй вход второго элемента И соединен с пбфвыми входами третьего элемента И-НЕ и четвертого элемента И, второй вход четвертого элемента И соединен с прямьм выходом второго триггера и с первым входом четвертого элемента И-НЕ, подключенного вторым входом к инверсному выходу первого триггера, к первым входам пятого и шестого элементов И, и с.вторым входом третьего элемента И-НЕ, соединенного с третьим входом с вторым входом шестого элемента И и с инверсным выходом второго триггера, к инверсному R-входу которого подключен выход седьмого элемента И, подключенный первым входом к инверсному R-входу первого триггера и к выходу восьмого элемента И, пятый элемент И-НЕ первым входом соединен с третьим входом четвертого элемента И-НЕ и с вторыми входами третьего и пятого элементов И, а выходом подключён к второму входу седьмого элемента И, вход первого триггера соединен с выходом пятого элемента И, инверсный R-вход первого тригге59
pa соединен с выходом шестого элемента И-НЕ,соединенного первым входом с первым входом второго элемента И-НЕ, и является четвертым входом блока управления коммутацией, а его второй вход является управляющим входом блока управления коммутацией, выход шестого элемента И соединен с первым входом седьмого эле- мента И-НЕ, соединенного вторым вхо- до с входами первого и второго элементов НЕ и является пятым управляющим входом блока управления коммута
8. Система по п.2, о т л и ч а ю- щ а я с я тем, что второй формиро ватель запроса на прерывание содержи два элемента И-НЕ, два элемента ИЛИ элемент И, DRS-триггер, диод, конден сатор, первый элемент Ш1И первым вхо дом .подключен к выходу второго элемента И-НЕ, соединенного первьм входом с выходом первого элемента И-НЕ соединенного первым входом с первым управляющим входом формирователя и вторым входом первого элемента И-НЕ а вторым, входом - через конденсатор
цией, а выходы первого и второго эле- 15 с шиной земля, и анодом диода, подментов НЕ являются четвертым и пятым управляющими выходами блока управления коммутацией, а выход седьмого элемента И-НЕ является десятым управляющим выходом блока, выходы третьего и четвертого элементов И-НЕ являются девятым и восьмым управляющими выходами блока управления коммутацией, и четвертый элемент И-НЕ через третий элемент НЕ подключен к входу четвертого элемента НЕ и вместе с выходом четвертого элемента являются первым и вторым управляющими выходами блока управления коммутацией, выходы второго и четвертого элементов И являются шестым и седьмым управляющими выходами блока управления коммутацией, выход третьего элемента .И - его третьим управляющим выходом, первый и второй входы восьмого элемента И являются.соответственно третьим и десятым управляющими входами блока управления.
7. Система ПОП.2, отличаю- гщ а я с я тем, что первый формирователь запроса на прерывание содержит элемент И, DRS-триггер, элемент НЕ и элемент.И-НЕ, соединенный первыми двумя входами с первым и третьим управляющими входами формирователя, а третьим входом - с выходом элемента НЕ, соединенного входом с вторым управляющим входом формирователя, выход элемента И-НЕ соединен с первым входом элемента И, подключенного вторым входом к инверсному R-входу DRS-триггера и к четвертому управляющему входу формирователя, С-вход триггера подключен к выходу элемента. И, а S- и R-входы триггера соединены с ИСТО.ЧНИКОМ напряжения логической единицы, выход триггера подключен -к управляющему выходу формирователя .
ключенного катодом к его первому входу, второй и третий входа первого элемента ИЛИ соединены с вторыми управляющими входами формирователя,
20 а выход подключен к первому входу элемента И, соединенного вторым вхо дом с входом группы четвертых упра . ляющих входов формирователя, а выхо дом - с С-входом DRS-триггера,под25 ключенного S-входом к выходу второг элемента ИЛИ, соединенного входами с вторым и третьим управляющими BKO дами формирователя,. D-вход DRS-триг гера соединен с источником напряжен
30 логической единицы, а R-вход соеди нен с входом группы четвертых управ ляющих входов формирователя, выход DRS-триггера соединен с управляющим вьгходом формирователя.
9.. Система по п.2, отличаю
35
40
45
50
55
матрица состояний содержит две матр цы, первая из которых включает деши фратор, две группы элементов И, гру пу элементов ИЛИ, группу селекторов мультиплексоров, число элементов в каждой группе включено по числу вых дов дешифратора, подключенного инфо мационными входами к первым информа ционным входам программируемой матр цы, каждый выход дешифратора подклю чен к первому входу соответствующег элемента И первой группы, подключен ных вторыми входами к выходам соответствующих селекторов-мультиплексо ров, соединенных управляющими входа ми к соответствующим вторым, третьи четвертым, пятым и шестым информаци онным входам программируемой матрицы, выходы элементов И первой группы подключены к первым входам соответствующего элементов ИЛИ, подключенных вторыми входами к соответств ющим выходам элементов И второй гру
60
8. Система по п.2, о т л и ч а ю- щ а я с я тем, что второй формиро ватель запроса на прерывание содержит два элемента И-НЕ, два элемента ИЛИ, элемент И, DRS-триггер, диод, конденсатор, первый элемент Ш1И первым входом .подключен к выходу второго элемента И-НЕ, соединенного первьм входом с выходом первого элемента И-НЕ, соединенного первым входом с первым управляющим входом формирователя и вторым входом первого элемента И-НЕ, а вторым, входом - через конденсатор
с шиной земля, и анодом диода, подключенного катодом к его первому входу, второй и третий входа первого элемента ИЛИ соединены с вторыми управляющими входами формирователя,
а выход подключен к первому входу элемента И, соединенного вторым входом с входом группы четвертых управ- ляющих входов формирователя, а выходом - с С-входом DRS-триггера,подключенного S-входом к выходу второго элемента ИЛИ, соединенного входами с вторым и третьим управляющими дами формирователя,. D-вход DRS-триггера соединен с источником напряжения
логической единицы, а R-вход соединен с входом группы четвертых управляющих входов формирователя, выход DRS-триггера соединен с управляющим вьгходом формирователя.
9.. Система по п.2, отличаю
0
5
0
5
матрица состояний содержит две матрицы, первая из которых включает дешифратор, две группы элементов И, группу элементов ИЛИ, группу селекторов мультиплексоров, число элементов в каждой группе включено по числу выходов дешифратора, подключенного информационными входами к первым информа - ционным входам программируемой матрицы, каждый выход дешифратора подключен к первому входу соответствующего элемента И первой группы, подключен- ных вторыми входами к выходам соответствующих селекторов-мультиплексоров, соединенных управляющими входами к соответствующим вторым, третьим, четвертым, пятым и шестым информационным входам программируемой матрицы, выходы элементов И первой группы подключены к первым входам соответствующего элементов ИЛИ, подключенных вторыми входами к соответству ющим выходам элементов И второй груп
пы, первые входы которых объединены и вторые входы которых объединены и подключены к соответствующда третьему управляющему и третьему информационному входам программируемой матрицы, выходы элементов ИЛИ подключены к вторым информационным выходам программируемой матрицы, вторая матрица состоит из Bi opoго дешифратора, ю соединенного управляющим выходом с
второй группы селекторов-мультиплексоров и третьей группы элементов И, соединенных, первыми входами с со- ответствзтощими выходами второго дешифратора, а вторыми входами с выхо- 15 дами соответствующих селекторов-мультиплексоров второй группы, а выхо,цы элементов И третьей группы соединены с первыми информационными выходами программируемой матрицы, входы 20 дешифратора соединены с первыми управляющими входами, программируемой матршды, а входы селекторов-мультиплексоров соединены с соответствующими первыми управляющими, первыми, 25 вторыми, третьими, четвертыми информационными входами программируемой матрицы.
10, Система по п.2, о т ли ч а ю- щ а я с я тем, что второе устройст- : ЗО во сопряжения содержит три блока уп- равления, формирователь требования прерывания А, формирователь требования прерывания Б, схему совмещения,
управляющим выходом устройства, вто рым информационным выходом - с перв группой командных выходов устройств вторая группа выходов устройства по ключена к второму информационному в ходу первого блока управления, а тр тья группа командных выходов устрой ва соединена с первым информационны выходом второго блока управления, с единенного управляющим входом с тре тьим информационным выходом дешифра тора, подключенного четвертым инфор мационным выходом к второму управля ющему входу третьего блока управления, первый выход первого управляющ го выхода устройства соединен с управляющим выходом формирователя тре бования прерывания А, подключенного синхронизирующим входом к синхронизирующему входу схемы совмещения и первым ВХОДОМ:синхронизирующего вхо да устройства, второй его вход соединен с синхронизирующим входом фо мирователя требования перекдпочения
формирователь импульсов и дешифратор, , соединенного первым управляющим
подключенный информационными входами к первым информационным входам .. второго устройства сопряжения, первым и вторым .информационными выходами -к первому,и второму управляющим входам первого блока управления,соединенного первым информационным вХо- дом с информационно-командным входом устройства, с первыми информационными входами второго и третьего блоков управления и управляющим входом схемы .совмещения, вторым информационным входом - с вторым .информационным входом второго блока управления, информационным входом формирователя им пульсов и третьему управляющему входу устройства, третий информационный вход первого блока управления соединен с третьим информационным входом второго блока управления и первым (1Нформационным выходом третьего блока управления и информационным выхо- до М устройства, а первым информационным выходом первый блок управления
выходом с первым управляющим выходо устройства, BTopbiM управляющим выхо дом - с вторым управляющим входом схемы совмещения, а третьим управ40. ляющим входом; - с входом четвертого управляющего входа устройства, подключенного к третьему управляющему входу схемы совмещения, соединенной информационным выходом с вторым .уп45 равляющим выходом устройства, а информационным входом - с вторым управляющим входом устройства.
11, Систем;а по п,10, отлича ющая с я -.тем, что первьй блок
50 управления включает шесть элементов И, четыре элемента И-НЕ, элемент 2НЕ-И-НЕ, ЗНЕ-ИЛИ, триггер первые входы первого, второго, третьего элементов И, третьего элеменgg та И-НЕ соединены с информационно- команднь м входом устройства, а их вторые входы подключены к первому, второму, третьему и четвертому управляющим входам блока, выход перподключен к четвертому информационно- му входу второго блока управления и первому информационному формирователю требования прерывания А, соединенногр. вторым информационным входом с выходом формирователя импульсов, подключенного входом к первому управляющему входу третьего блока управления,
управляющим выходом устройства, вторым информационным выходом - с первой группой командных выходов устройства, вторая группа выходов устройства подключена к второму информационному выходу первого блока управления, а третья группа командных выходов устройства соединена с первым информационным выходом второго блока управления, соединенного управляющим входом с третьим информационным выходом дешифратора, подключенного четвертым информационным выходом к второму управляющему входу третьего блока управления, первый выход первого управляюще го выхода устройства соединен с управляющим выходом формирователя тре бования прерывания А, подключенного синхронизирующим входом к синхронизирующему входу схемы совмещения и первым ВХОДОМ:синхронизирующего входа устройства, второй его вход соединен с синхронизирующим входом формирователя требования перекдпочения
выходом с первым управляющим выходом устройства, BTopbiM управляющим выходом - с вторым управляющим входом схемы совмещения, а третьим управляющим входом; - с входом четвертого управляющего входа устройства, подключенного к третьему управляющему входу схемы совмещения, соединенной информационным выходом с вторым .управляющим выходом устройства, а инормационным входом - с вторым управляющим входом устройства.
11, Систем;а по п,10, отличающая с я -.тем, что первьй блок
управления включает шесть элементов И, четыре элемента И-НЕ, элемент 2НЕ-И-НЕ, ЗНЕ-ИЛИ, триггер, первые входы первого, второго, третьего элементов И, третьего элемента И-НЕ соединены с информационно- команднь м входом устройства, а их вторые входы подключены к первому, второму, третьему и четвертому управляющим входам блока, выход пер63
вого элемента И соединен с первым .входом четвертого элемента Ц и первым входом первого элемента И-НЕ,соединенного в.тЬрым входом с вторым информационным входом блока, подключенным к первому входу четвертого и второго элементов И-НЕ, соединенных выходами соответственно с первым и вторым входами элемента ЗНЕ-РШИ,подключенного третьим входом к выходу первого элемента И-НЕ, а выходом - к входу С-триггера, соединенного входами D и S с единичным потенциалом, а входом R - с выходом элемента 2НЕ-И-НЕ, подключенного первым в,ходом к выходу .третьего элемента И-НЕ, а вторым входом - к входу сбро блока, прямой выход триггера соединен с вторым информационным выходом блока, а инверсный - с первым входом четвертого элемента И, вторым входом пятого элемента И и вторым информационным выходом блока и первы входом шестого элемента И, соединенного вторым входом с выходом третьего элемента И, а выходом к второму информационному выходу блока, соединенного с выходом четвертого элемента И и пятого элемента И, соединеного первым входом с выходом второго элемента И и вторым входом четвертого элемента И-НЕ.
12. Система по п.10, о тли ч а- ю щ а я.с я тем, что второй блок управления включает два элемента И,четыре элемента И-НЕ, два элемента ИЛИ-НЕ, и элемент 2НЕ-ИЛИ-НЕ, первые входы элементов И соединены с первым информационным входом блока, вторые - с первым и вторым управляющими входами блока, а выходы с первыми входами первого, третьего и второго, четвертого элементов И-НЕ соответственно, вторые входы элементов первого и второго И-НЕ подключены к третьему информационному входу блока, выход первого элемента И-НЕ соединен с первым входом элемента 2НЕ-ИЛИ-НЕ и вторым входом третьего элемента И-НЕ, подключенного выходом к второму информационному выходу блока и к входу первого элемента ИЛИ-НЕ соединенного выходом с третьим ин- фор 1ационным выходом блока, подключенным к выходу второго элемента ИЛИ-НЕ, соединенного входом с вторым информационным выходом блока и с выходом четвертого элемента И-НЕ,
2879264
подключенного вторым входом к выходу второго элемента И-НЕ, к второму входу элемента 2НЕ-ШШ-НЕ, соединен- ного выходом с первым информационным входом блока,
13.Система по п.10, о т.л и ч а- ю щ а я с я тем, что третий блок управления включает триггер, дешифра10 тор, элемент ИЛИ-НЕ и регистр, со- единенный информационным входом с первым информационным входом блока, синхронизирующим входом - с вторым управляющим входом блока, информационным выходом - с командным выходом и первым информационным выходом бло- ка, одним разрядом информационного выхода.-подключен к С-входу триггера, соединенного инверсным выходом С пер- в.ым информационным выходом блока,R- входрм - с единичным.потенциалом, а S-входом - с выходом элемента ШТИ-Н, подключенного входом к первому уп-. равляющему входу блока, второй разряд
25 регистра соединен с установочными
входами дешифратора, соединенного выходами с первыми информационными выходами блока.
14.Система по п.10, о т л и ч а15
0
5
0
5
0
5
ю щ а я с я тем, что формирователь требования переключения Б включает четыре элемента ИЛИ-НЕ, три элемента 2НЕ-ИЛИ, элемент ИЛИ, пять элементов И-НЕ, три триггера, вход первого элемента ИЛИ-НЕ соединен с уп- равляющим входом формирователя, соединенном с входом второго элемента ИЛИ-НЕ, выходы первого и второго элементов ИЛИ-НЕ соединены соответственно с первым и вторым входами пер - вого элемента 2НЕ-ИЛИ, подключенного выходом к С-входам первого и третьего триггеров, R-входу второго триггера и входу элементов ИЛИ, вход третьего элемента ИЛИ-НЕ подключен к синхро- , низирующему входу блока, а выход соединен .с К-входом первого триггера, подключенного выходом к первому управляющему выходу блока, на D- и S- входы «тервого, второго и третьего триггеров подан единичный потенциал, входы первого элемента И-НЕ соединены с синхронизирующими входами блока, а выход подключен к R-входу третьего триггера, соединенного прямым выходом с первым входом третьего элемента И-НЕ, подключенного вторым входом к прямому выходу второго триггера, первому входу второго элемента
65
И-НЕ, входу, четвертого элемента. ИЛИ-НЕ, второй вход второго элемента И-НЕ соединен с инверсным выходом третьего триггера, а выход - подключен к первому входу третьего.элемента 2НЕ--ИЛИ, соединенного выходом с управляющим входом блока, а вторым входом - с четвертого элемента И-НЕ, подключенного первым входом к инверсному вьпсоду второго триггера и первому входу пятого элемента И-НЕ соединенного выходом с первым входом второго элемента 2НЕ-ШШ, подключенного выходом к управляющему входу бл9«а, а вторым входом к выходу третьего элемента И-НЕ, вторые входы четвертого и пятого элементов И-НЕ соединены с управляющим входом блока, а выход четвертого элемента ИЛИ-НЕ подключен к управляющему выходу блока.
15. Система по п.10, о т л и ч а- ю щ а я с я .тем, что формирователь требования прерывания включает два элемента И-НЕ, элемент 2НЕ-ИЛИ,элемент И, триггер, элемент 6НЕ-ИПИ и элемент 7НЕ-ИЛИ, соединенный входами с первым информационным входом формирователя, а выходом - с входом первого элемента И-НЕ, подключенного выходом к первому входу элемента 2НЕ-ИЛИ, соединенного вторым входом с выходом второго элемента ИЛИ-НЕ, соединенного входом с выходом элемента 6НЕ-Ш1И, подключенного входами к второму информационному входу формирователя, выход элемента 2НЕ-Ш1 соединен с первым входом элемента
15
ю,
66
20
25
30
35
соединенного выходом с С-входом триггера, входы D и S которого соединены с единичным потенциалом, R-вход соединен с первым входом элемента И и первым управляющим входом формирователя, а выход триггера соединен с управляющим выходом формирователя.
16. Система по п.10, о т л и ч а- ю щ а я с я тем, что формирователь импульсов включает четыре элемента И-НЕ,Элемент 2НЕ-И-НЕ,элемент ШШ-НЕ, два диода.и два конденсатора, вход элемента: ИЛИ-НЕ соединен с информаци- оннЫм вхрд5м формирователя импульсов, катодом первого Диода, первым входом первого элемента И-НЕ и первым входом второго элемента И-НЕ, соединенного BTopbiM входом с выходом первого элемента И-НЕ, подключенного первым входом к аноду диода и к одной из обкладок первого конденсатора, вторая об кладка которого подключена к общей шине, выход второго элемента И-НЕ соединен с первым входом элемента 2НЕ-И-НЕ, соединенного выходом с информационным выходом формирователя, а вторым входом - с выходом четвертого элемента И-НЕ, соединенного i первым входом о выходом третьего элемента И-НЕ, вторым входом - с выходом элемента ИЛИ-НЕ, первым входом.третьего элемента И-НЁ и катодом второго . диода, сйединенного анодом с вторьтм входом третьего элемента И-НЕ, пер- , вой обкладкой второго конденсатора, вторая обкладка которого подключена к оё1цей шине.
А)
.«V&K0
или
9/P&t.(t)
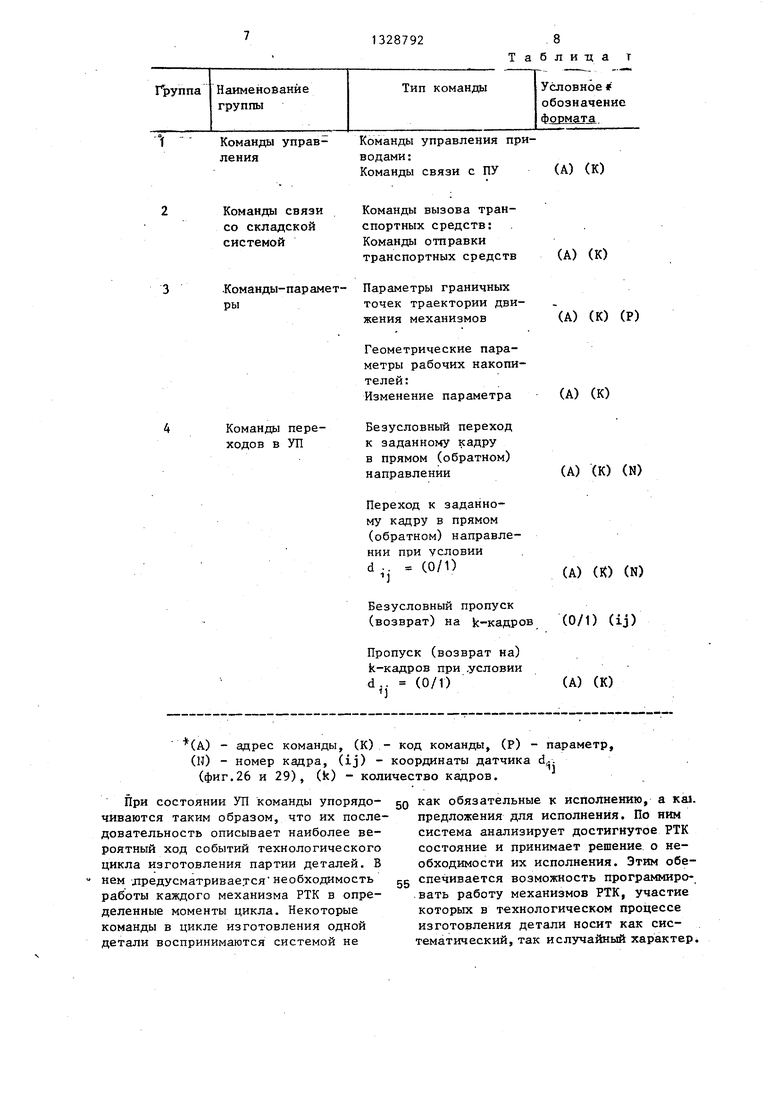
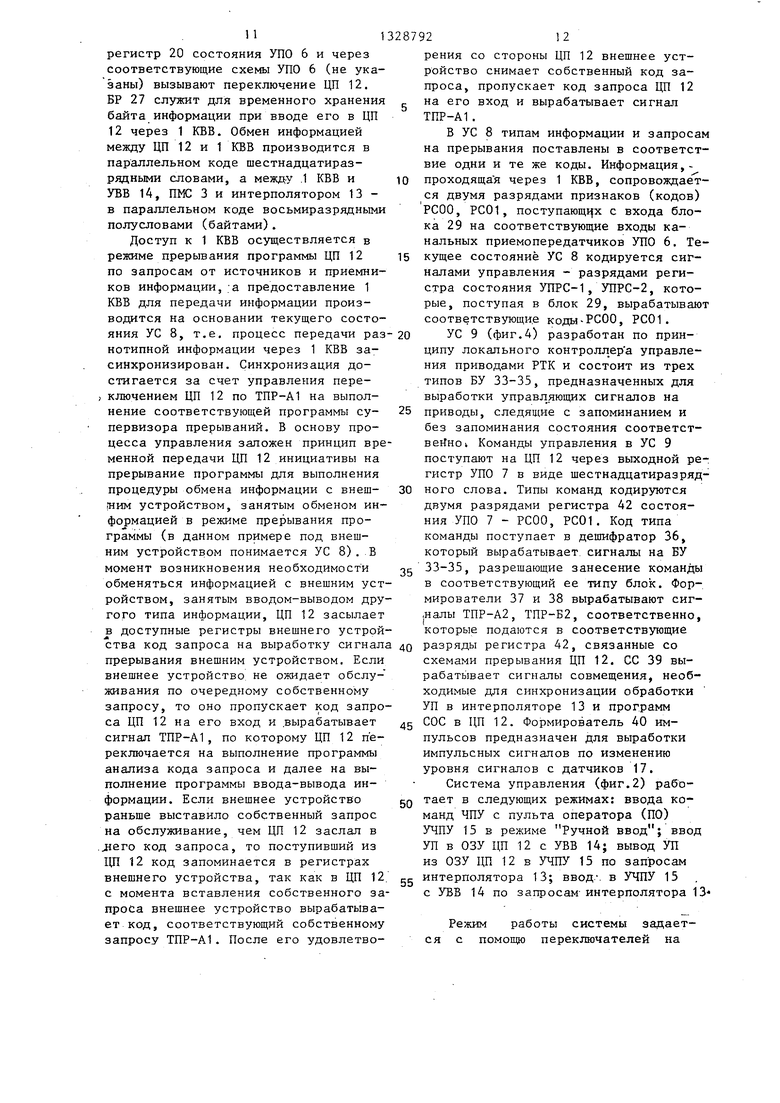
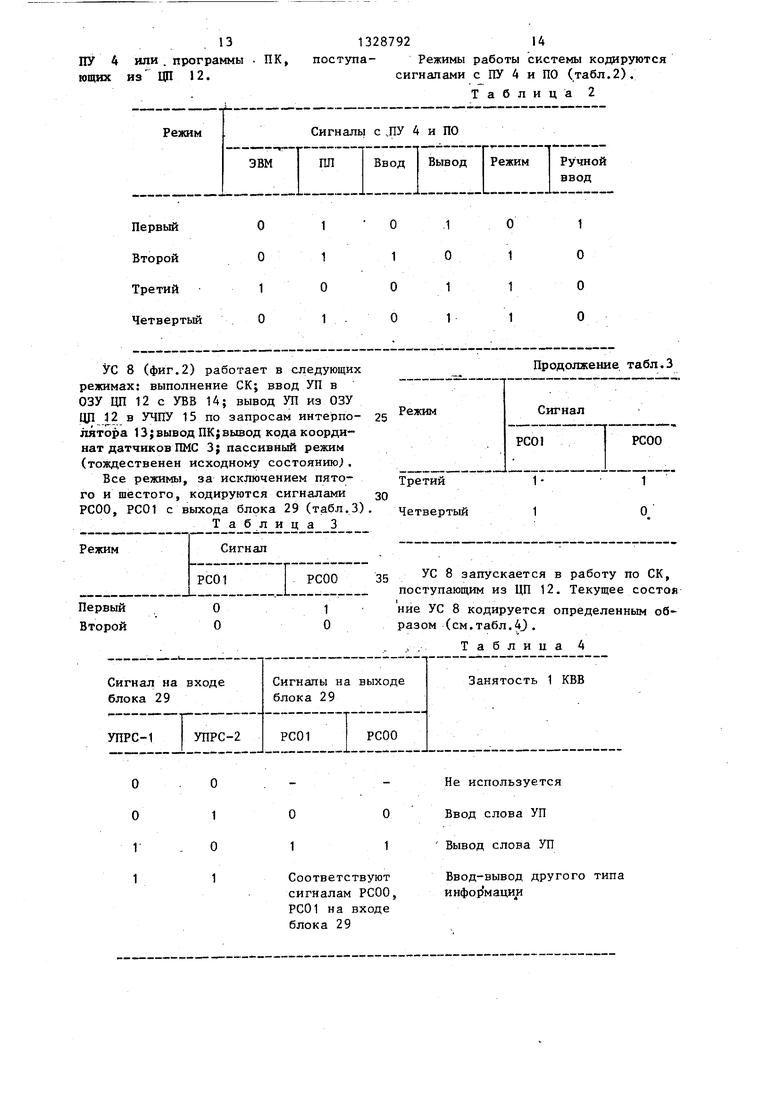
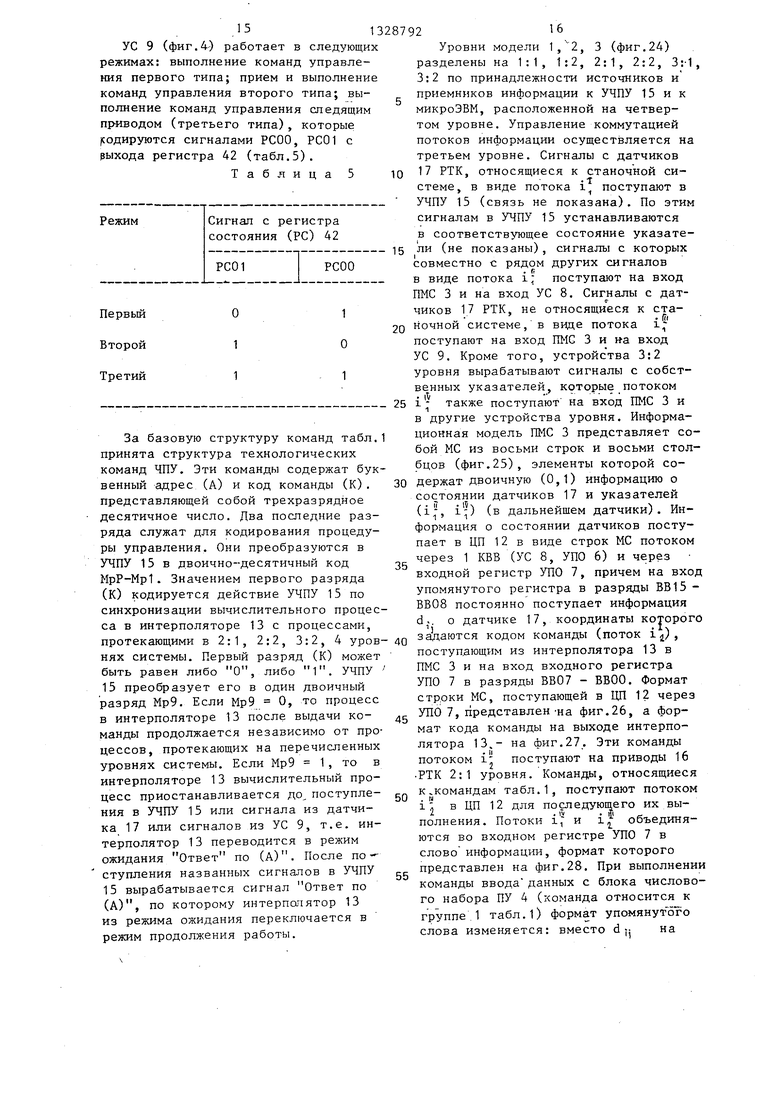
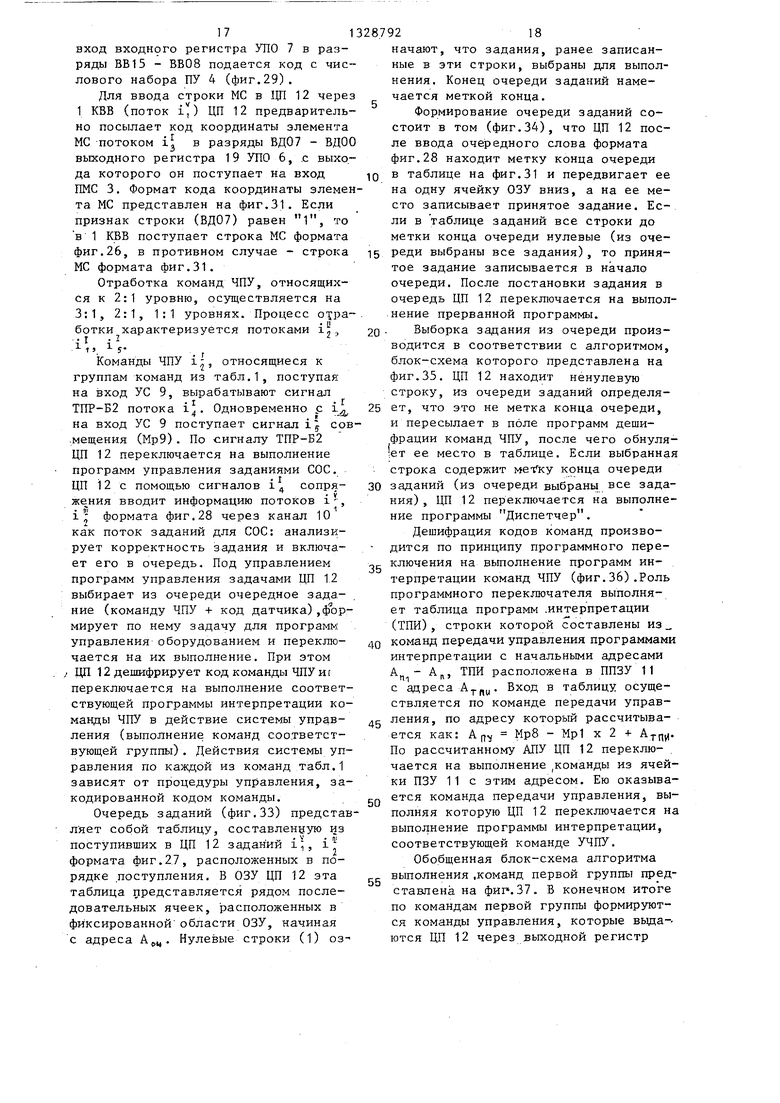
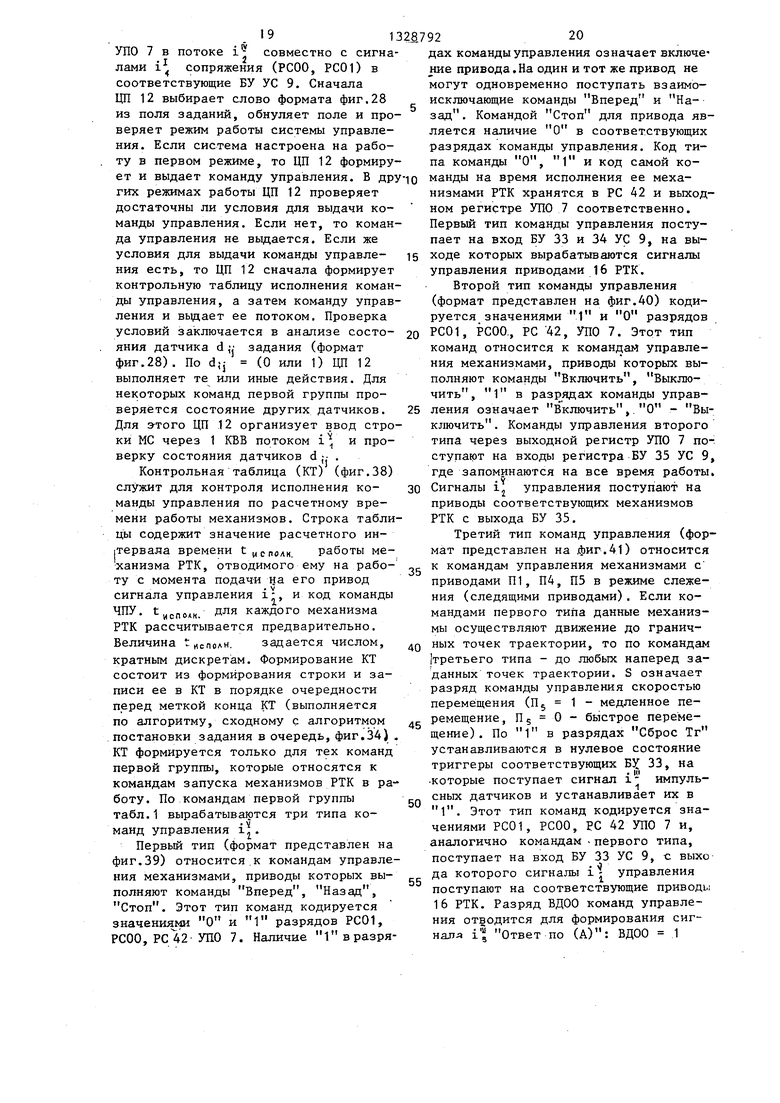
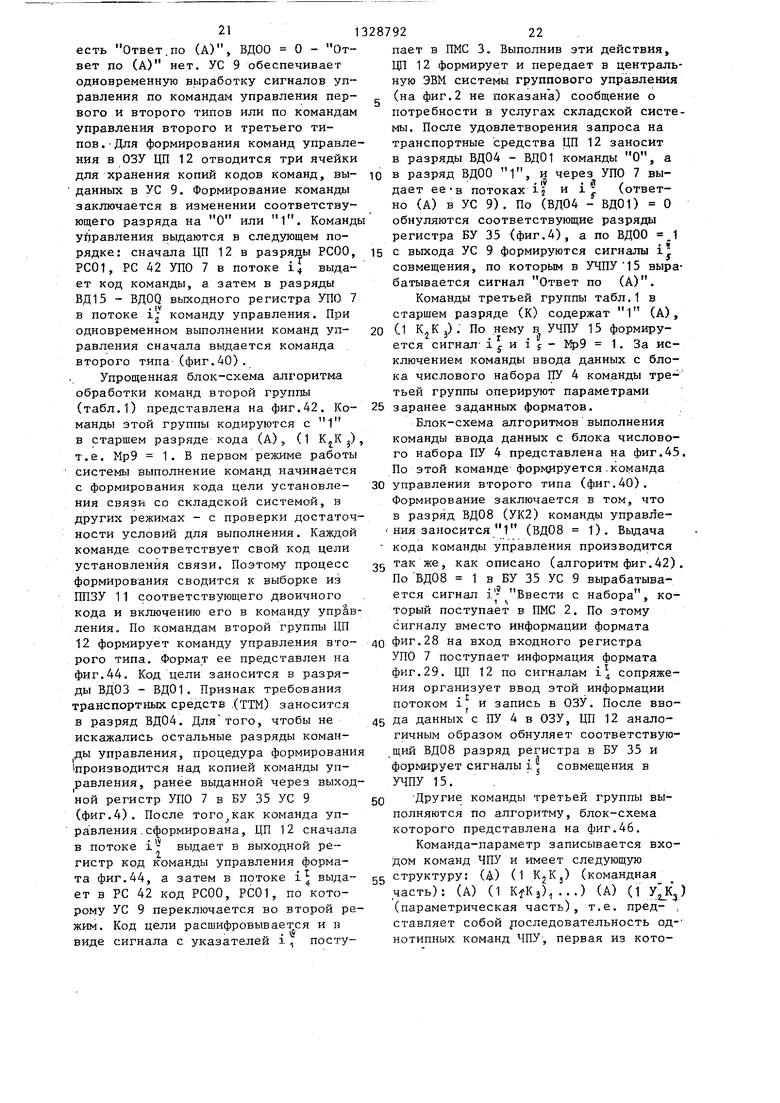
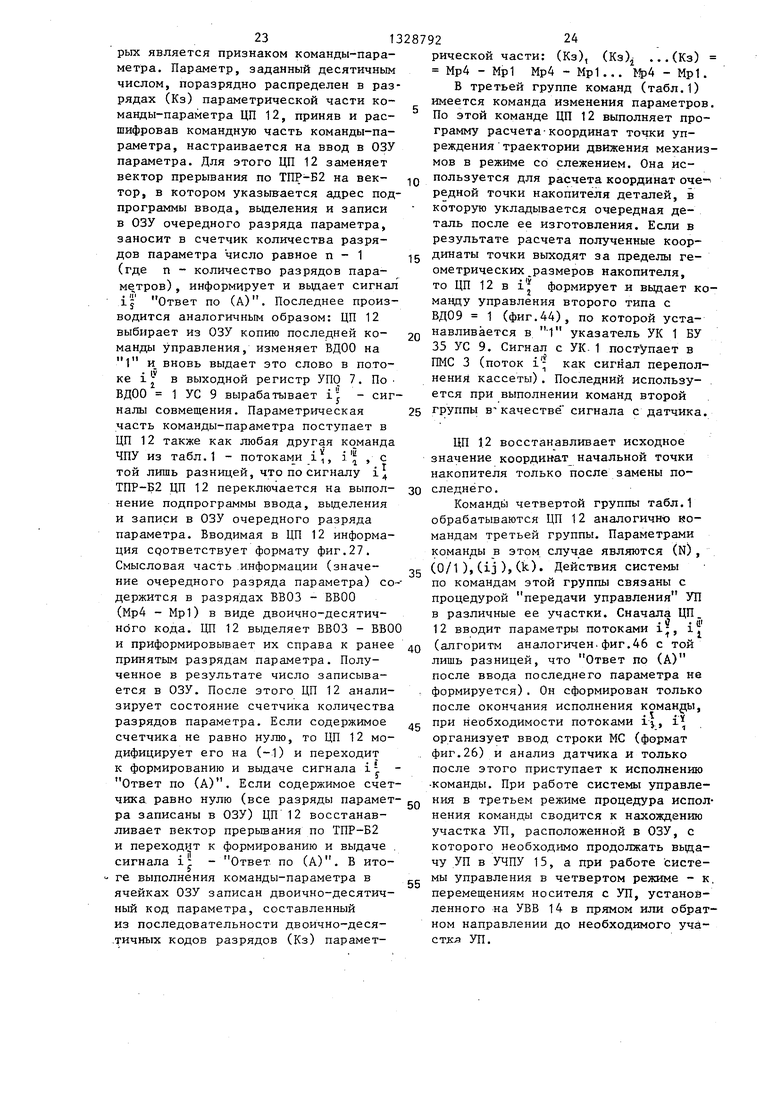
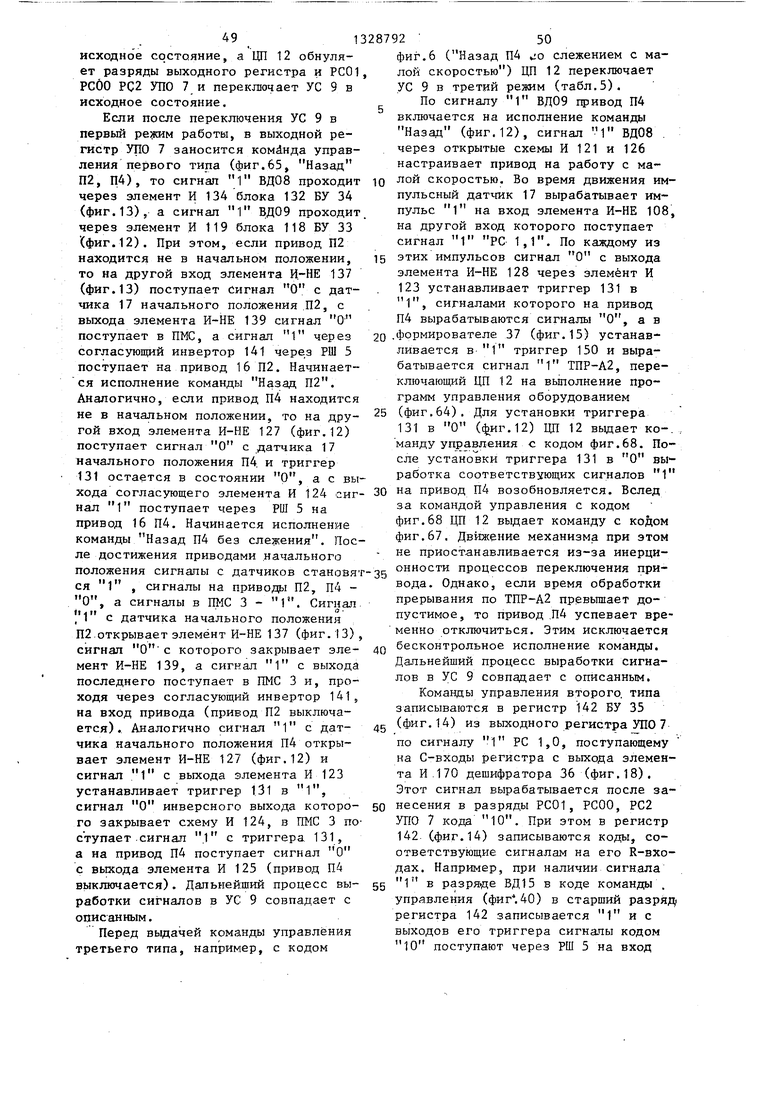
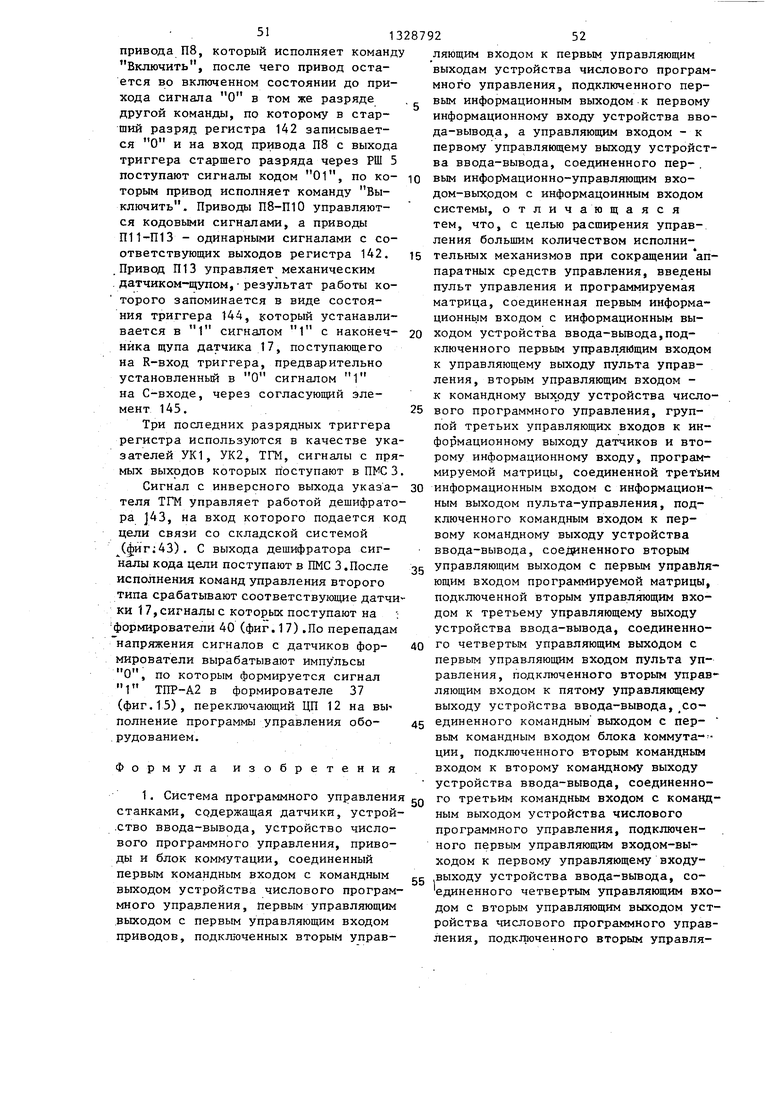
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обмена данными между электронно-вычислительной машиной и абонентами | 1985 |
|
SU1277125A1 |
| Устройство для сопряжения центрального процессора с группой арифметических процессоров | 1989 |
|
SU1702377A1 |
| Устройство для сопряжения центрального процессора с группой арифметических процессоров | 1988 |
|
SU1529236A1 |
| Устройство для контроля блоков памяти | 1991 |
|
SU1833920A1 |
| Устройство для сопряжения центрального процессора с группой арифметических процессоров | 1984 |
|
SU1254495A1 |
| Устройство для подключения абонентов к магистрали передачи данных | 1984 |
|
SU1254499A1 |
| Устройство для сопряжения ЭВМ с внешним устройством | 1986 |
|
SU1377864A1 |
| Процессор ввода-вывода | 1989 |
|
SU1797722A3 |
| Устройство для управления и обмена данными | 1986 |
|
SU1319042A1 |
| Устройство для регистрации цифровой информации | 1986 |
|
SU1386915A2 |
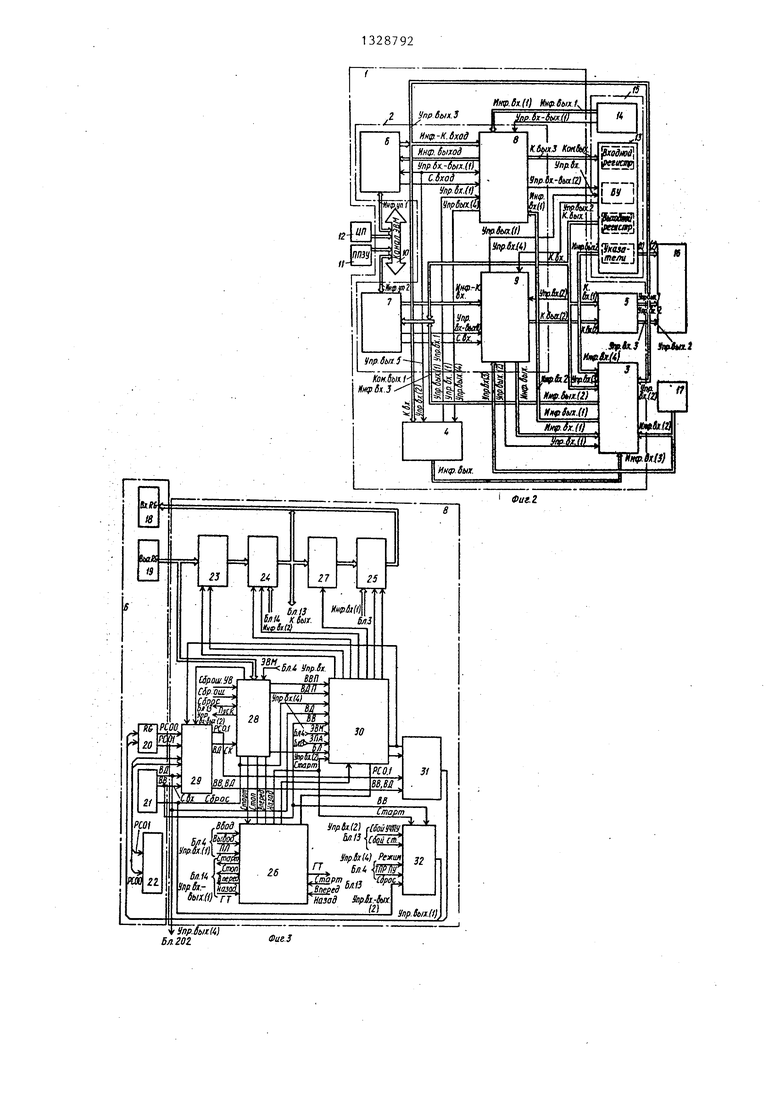
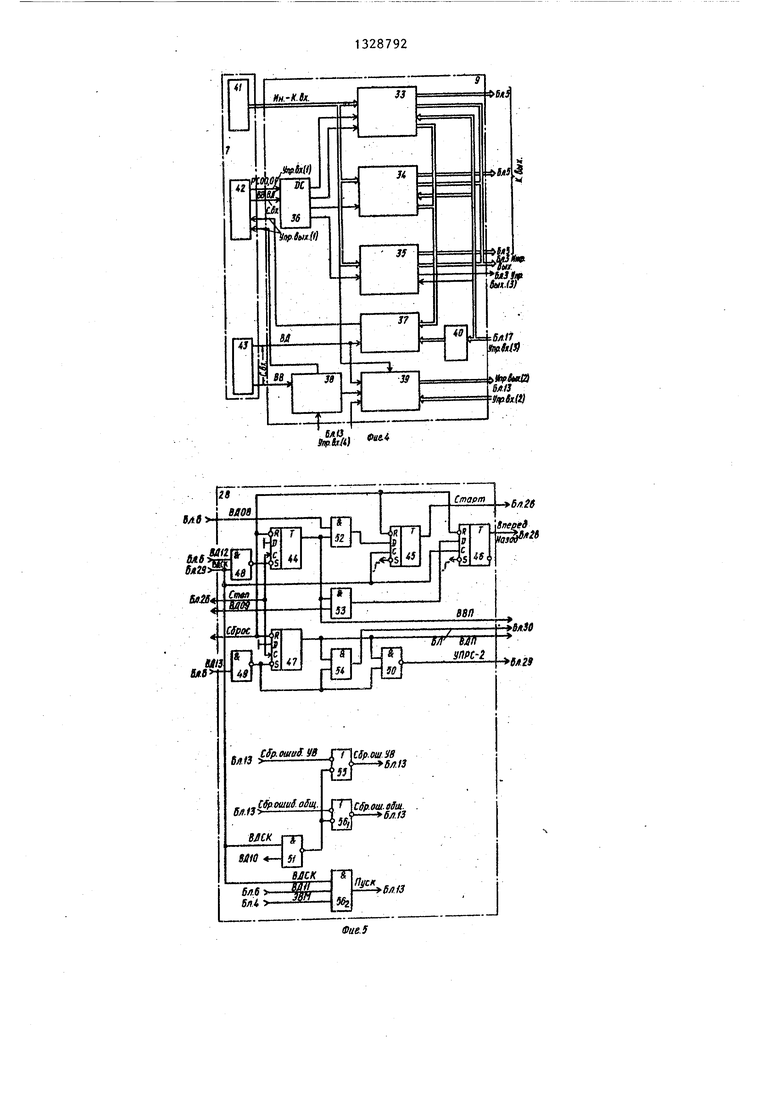
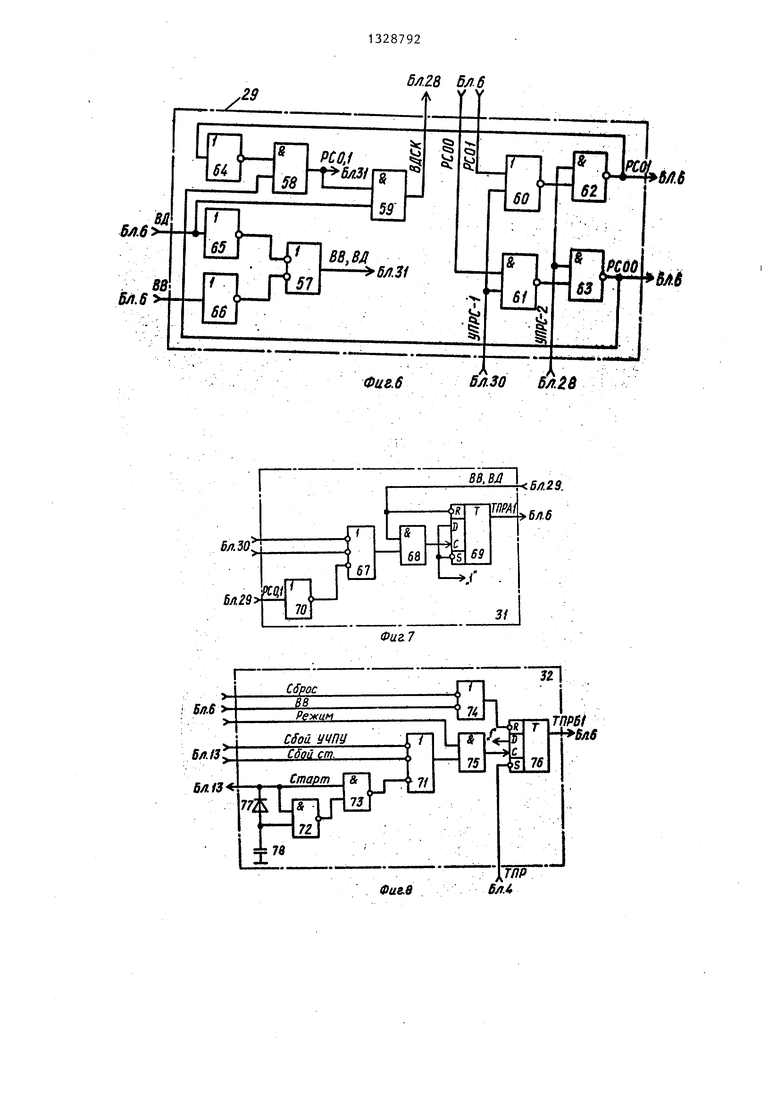
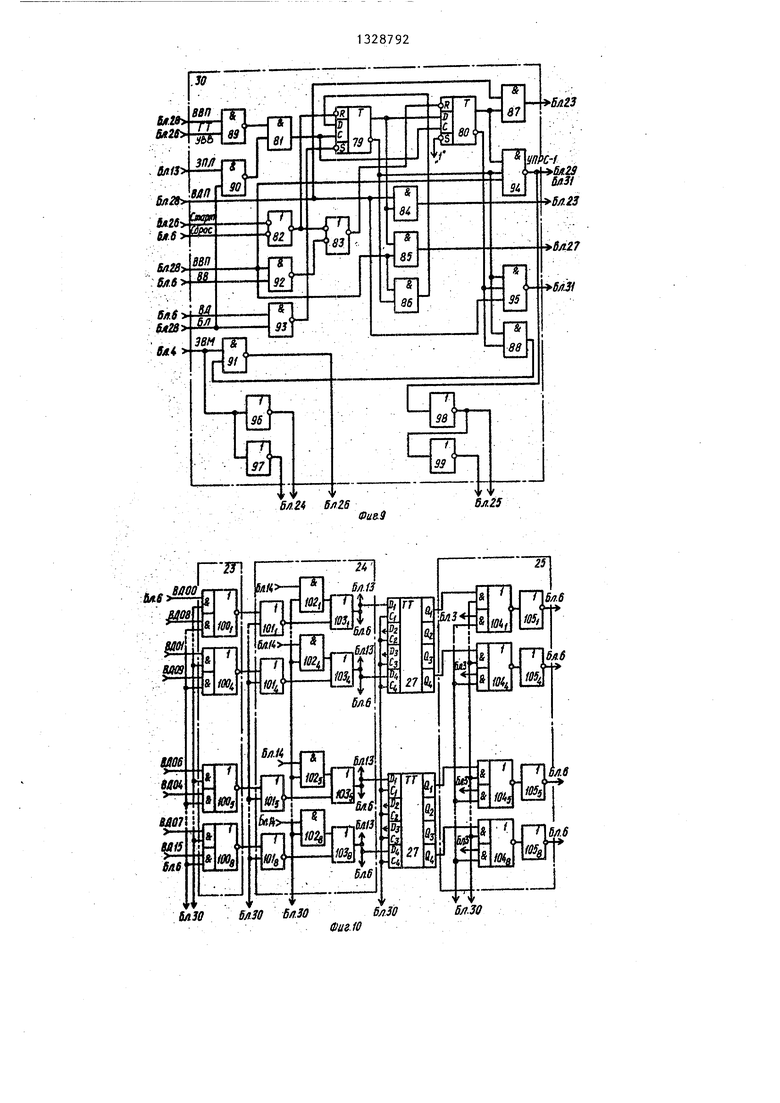
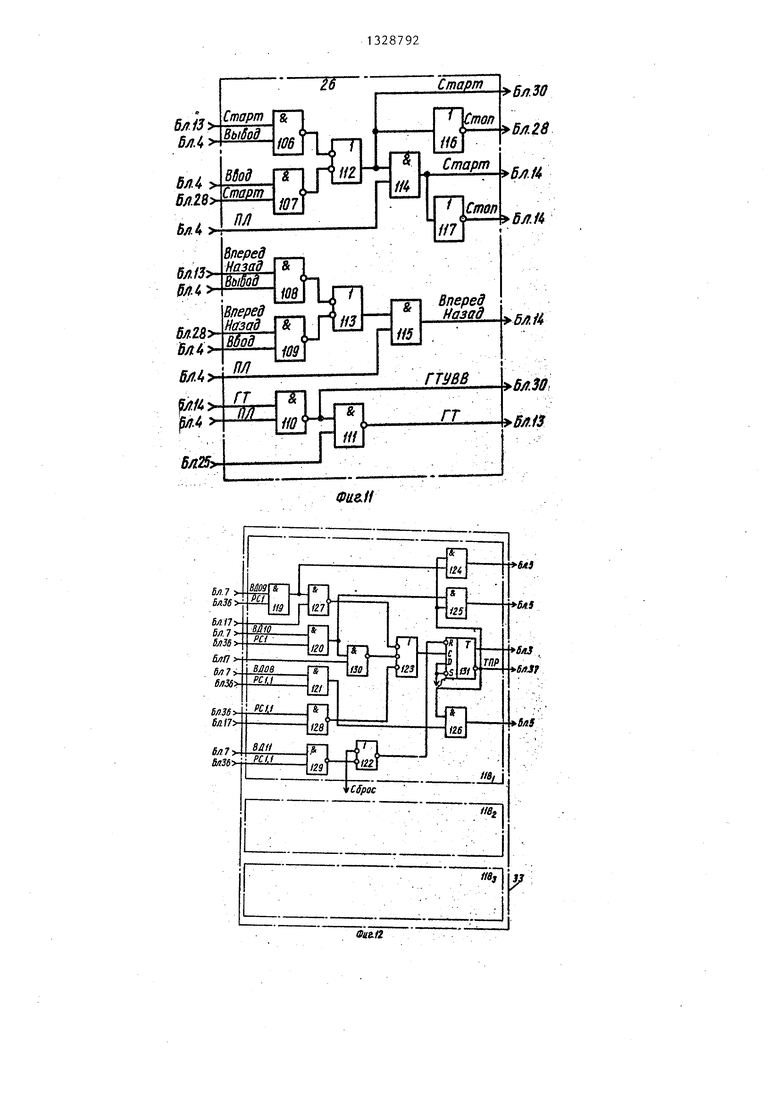
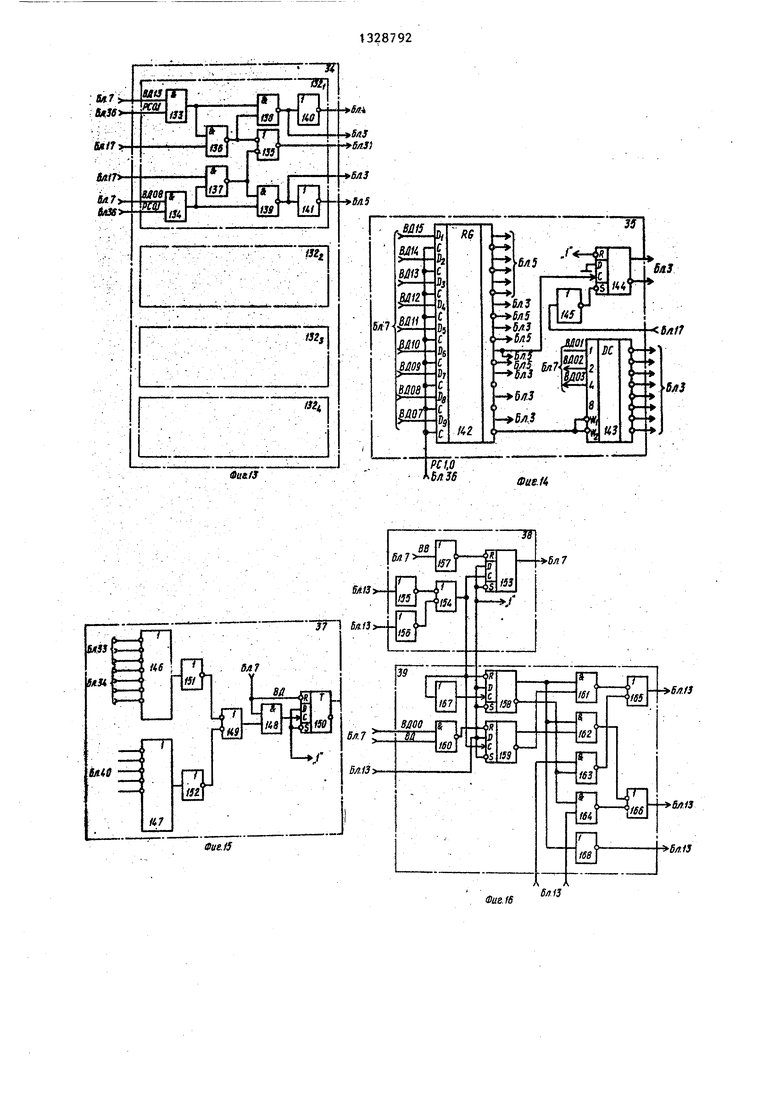
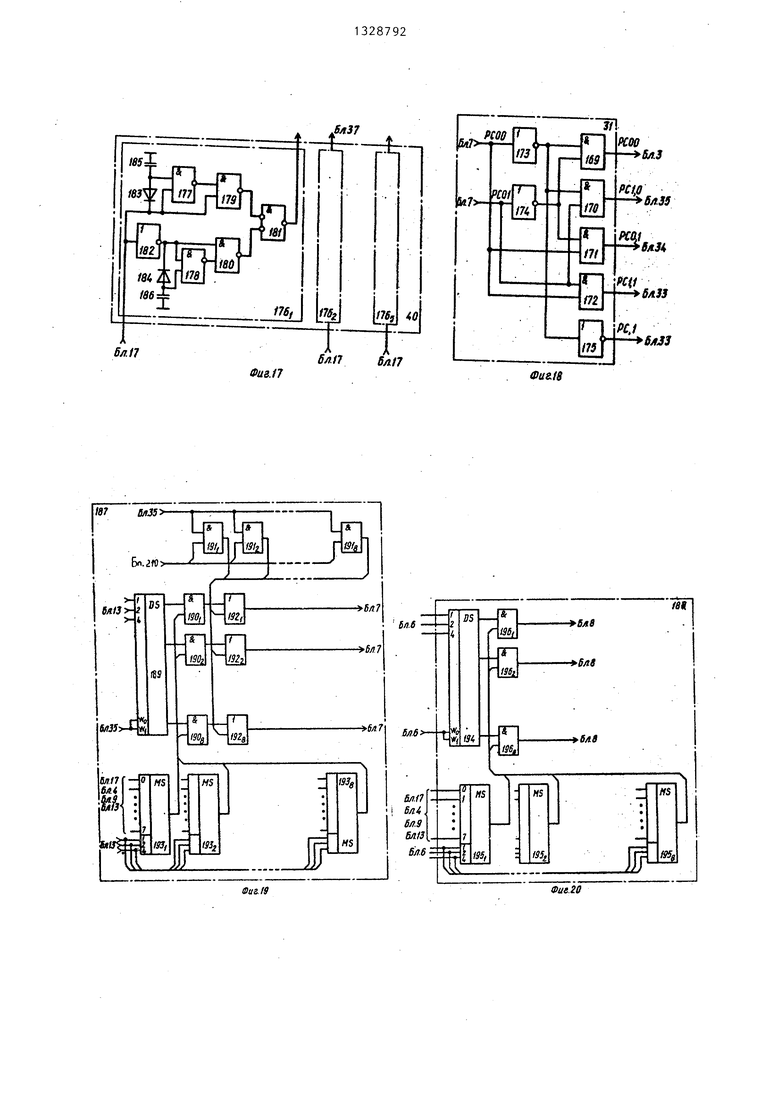
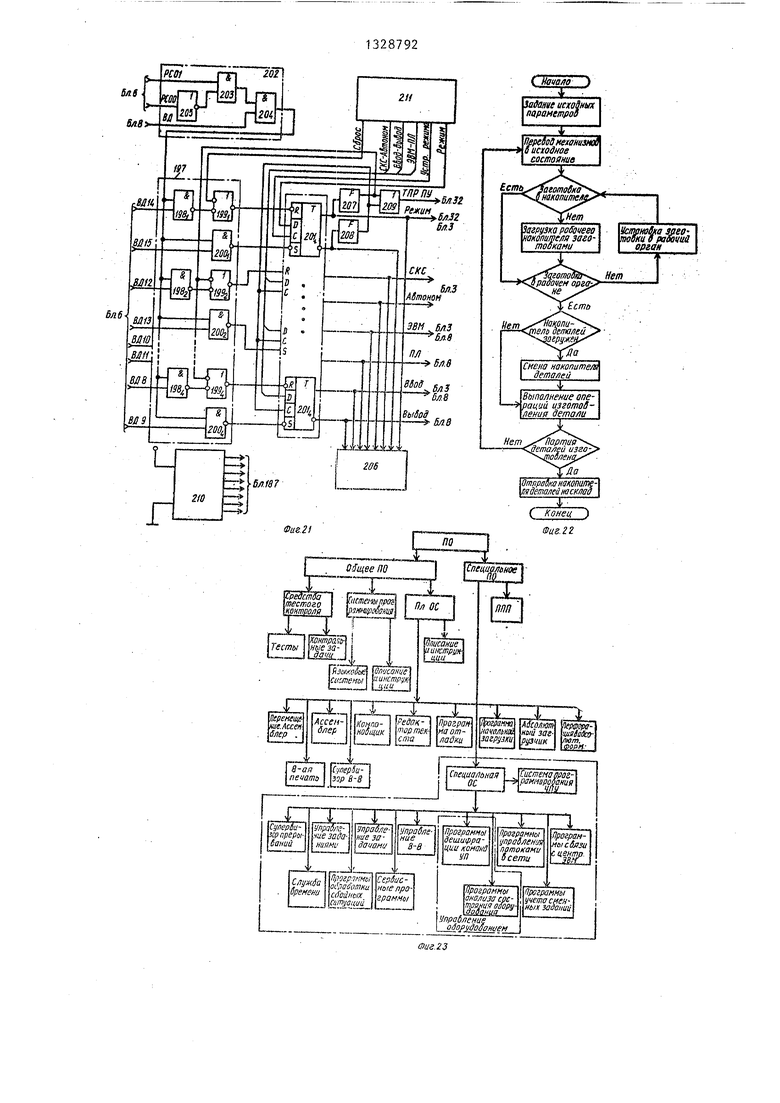
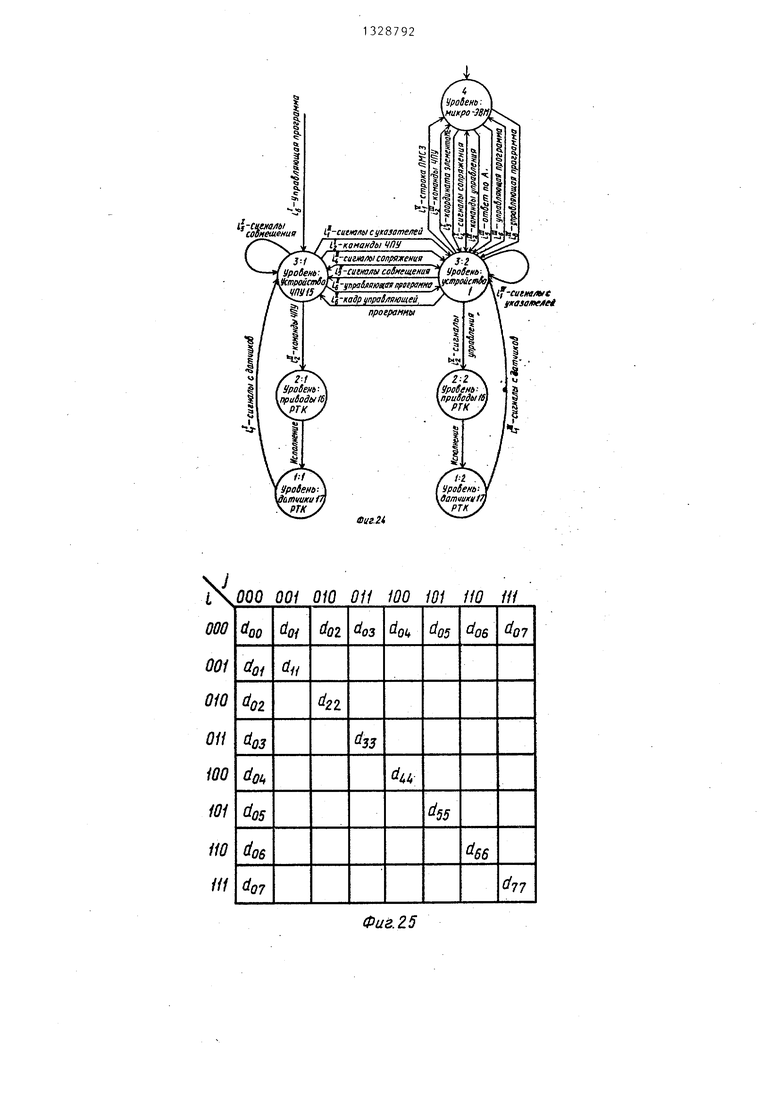
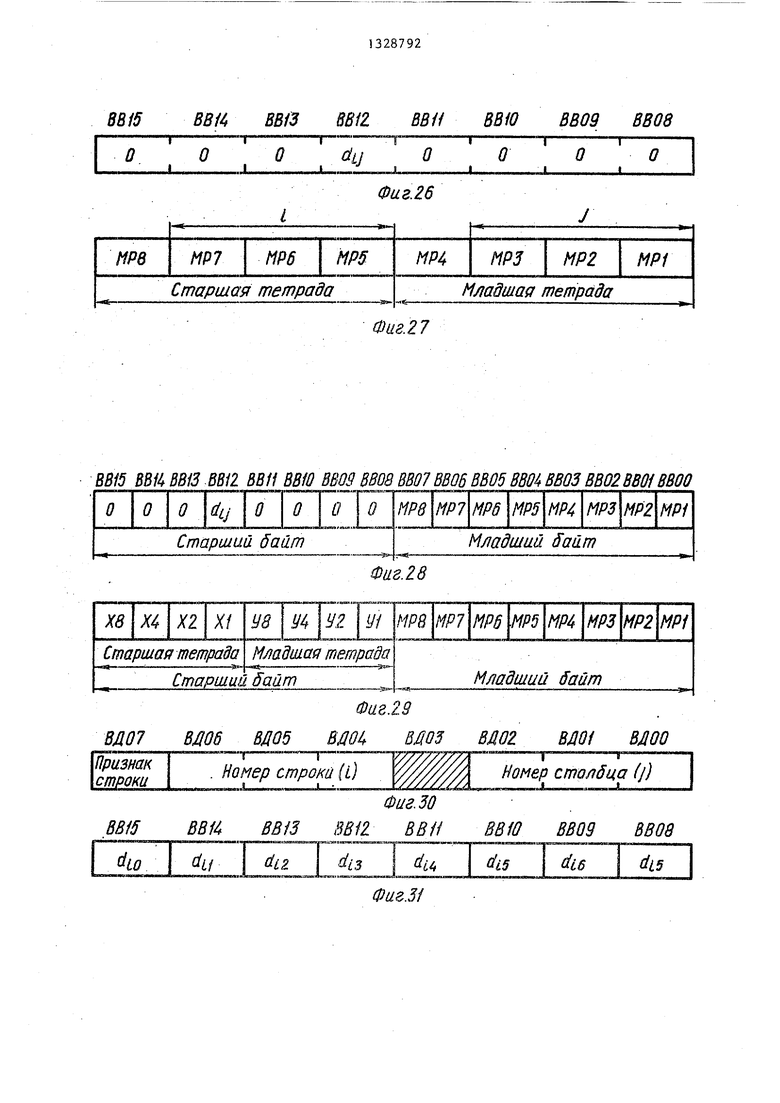
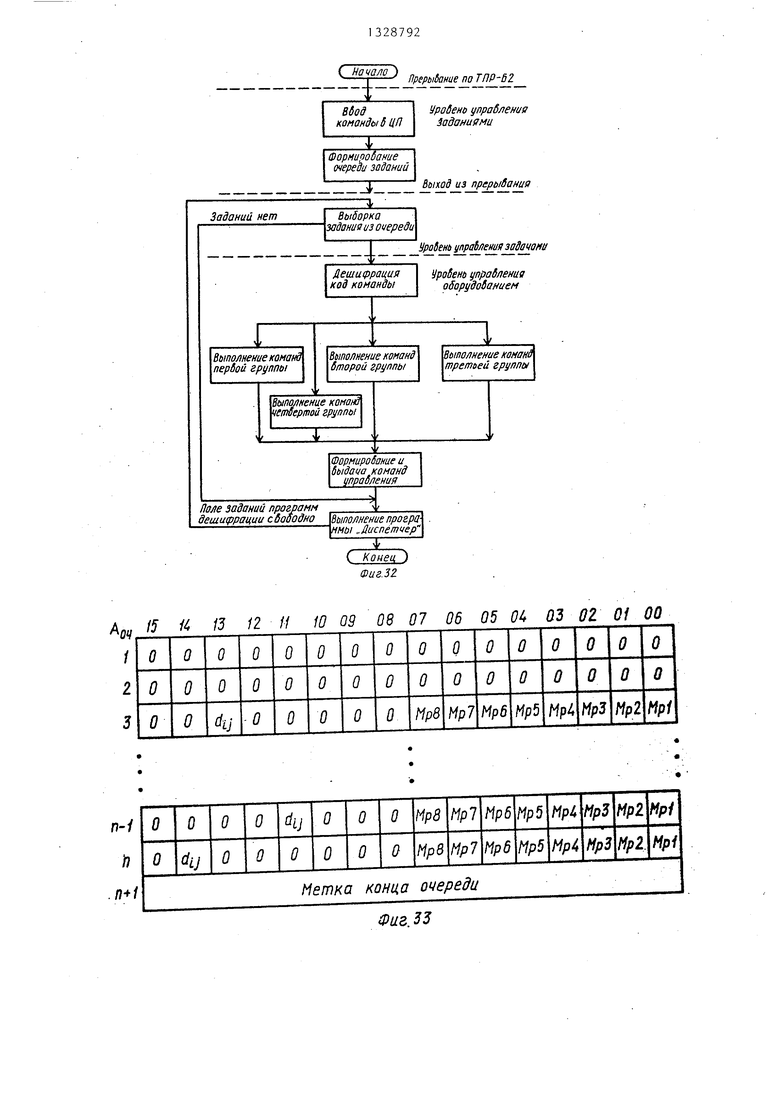
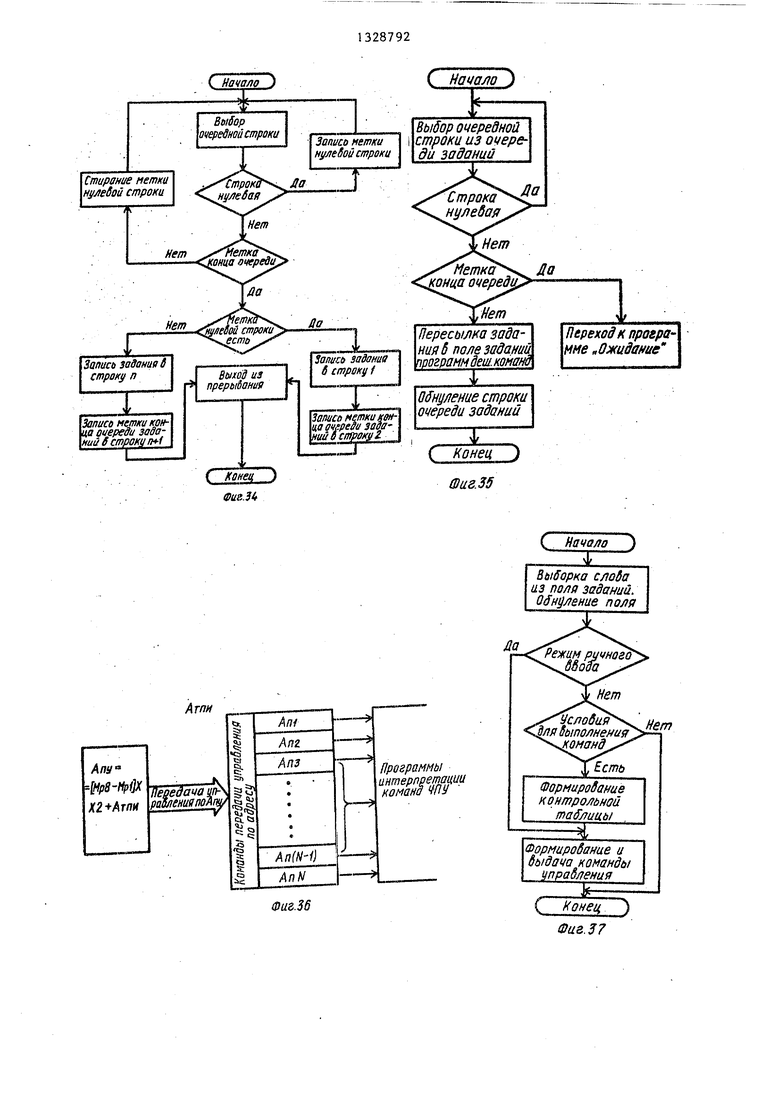
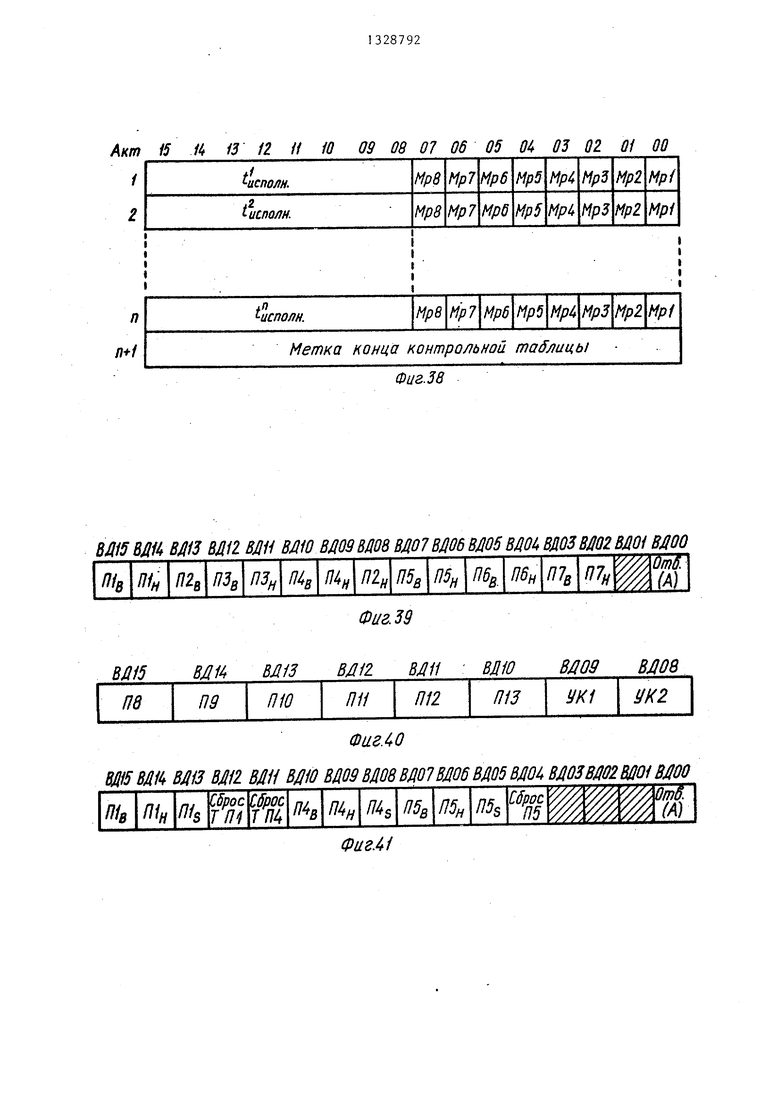
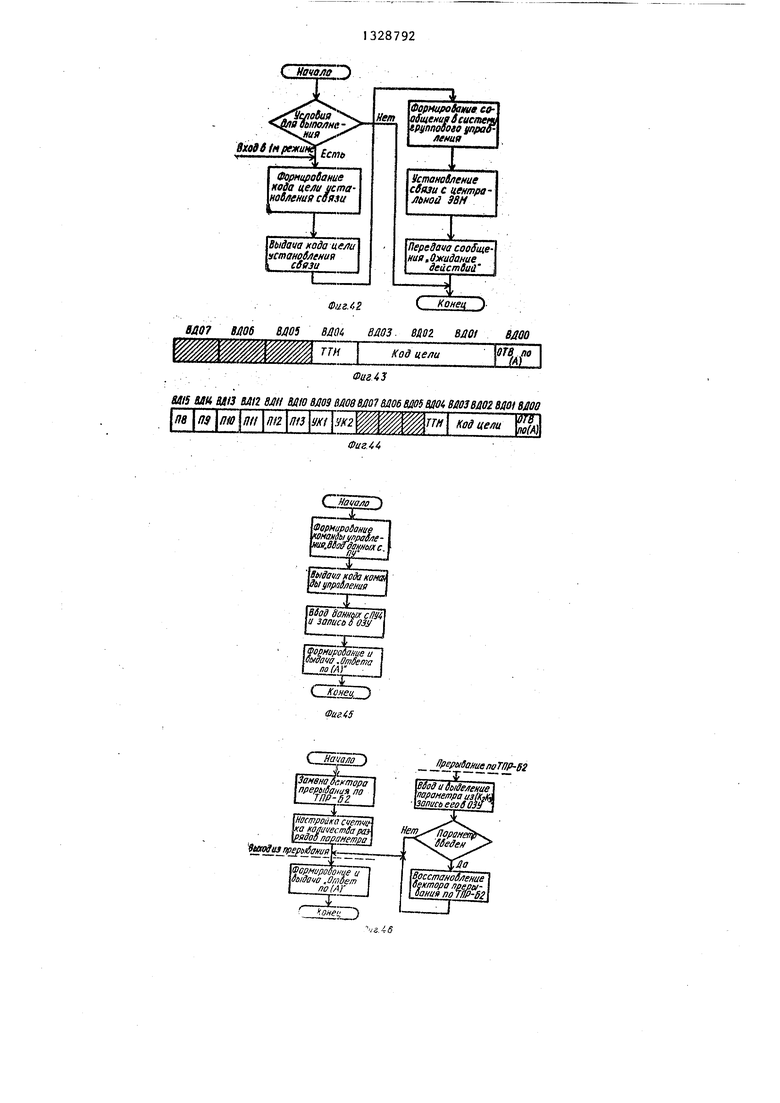
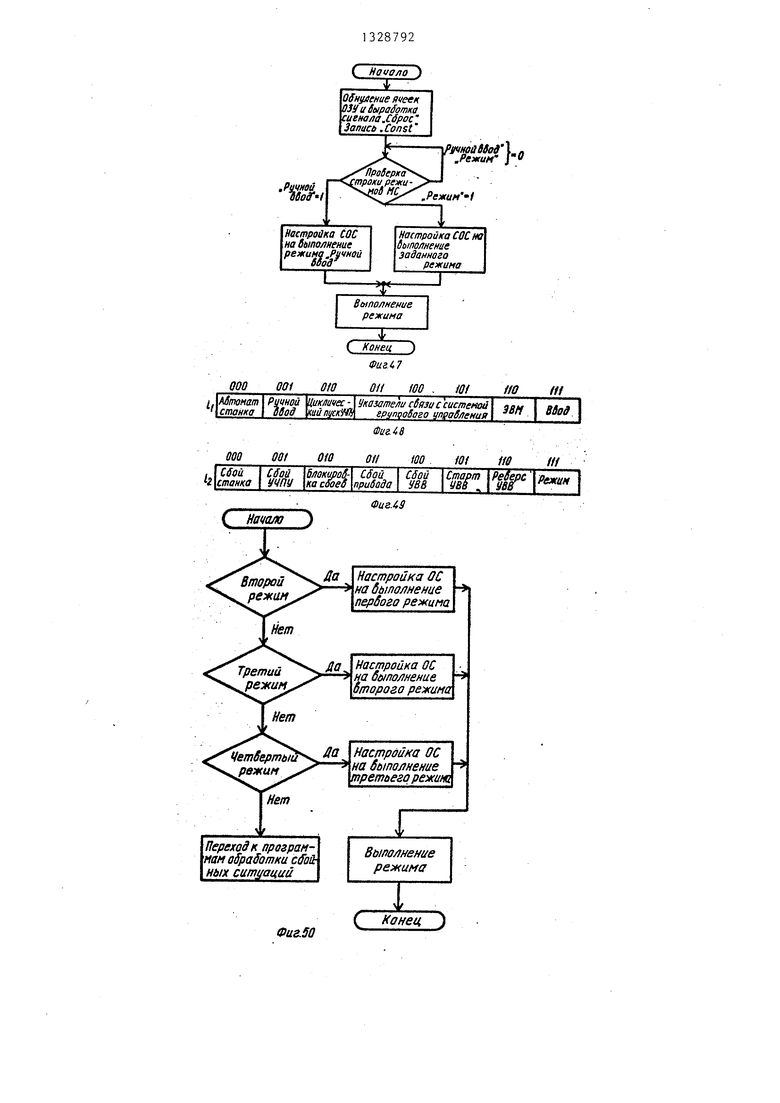
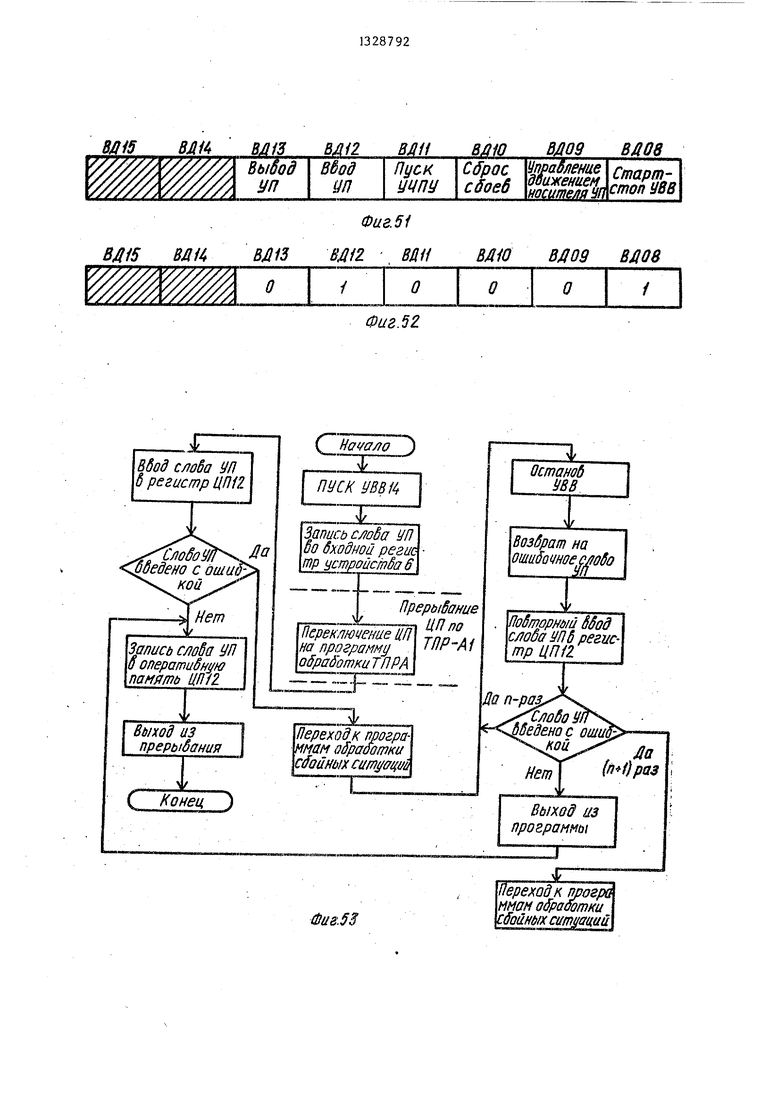
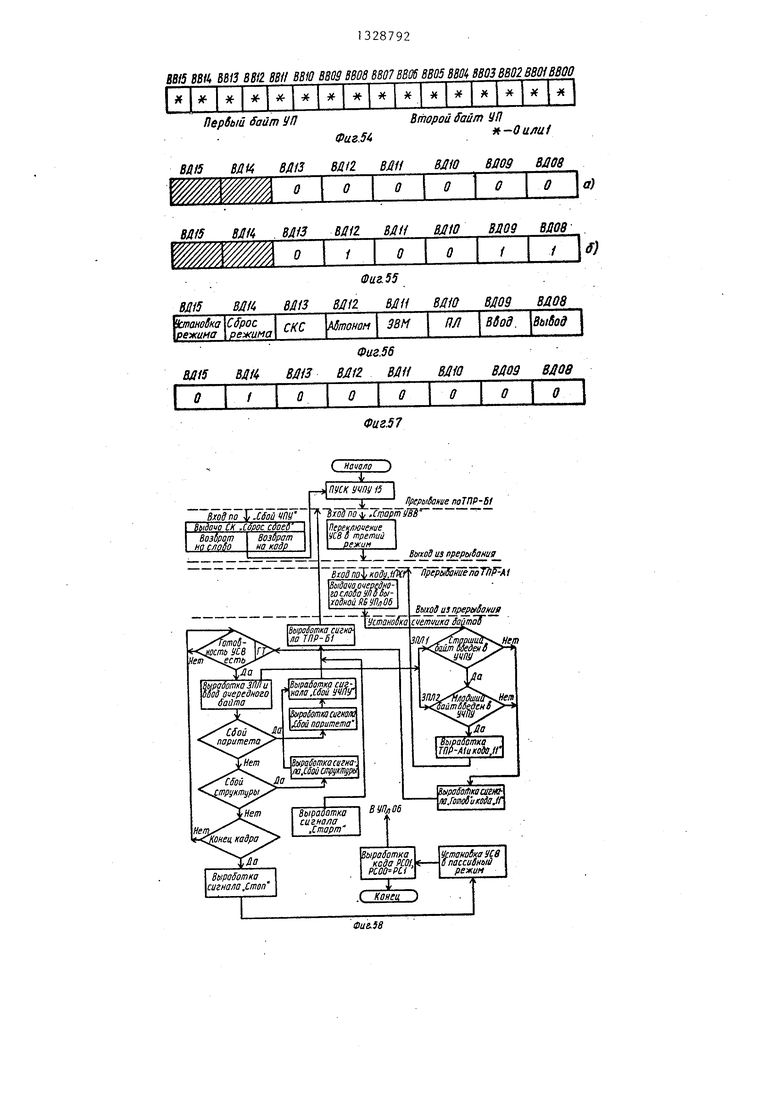
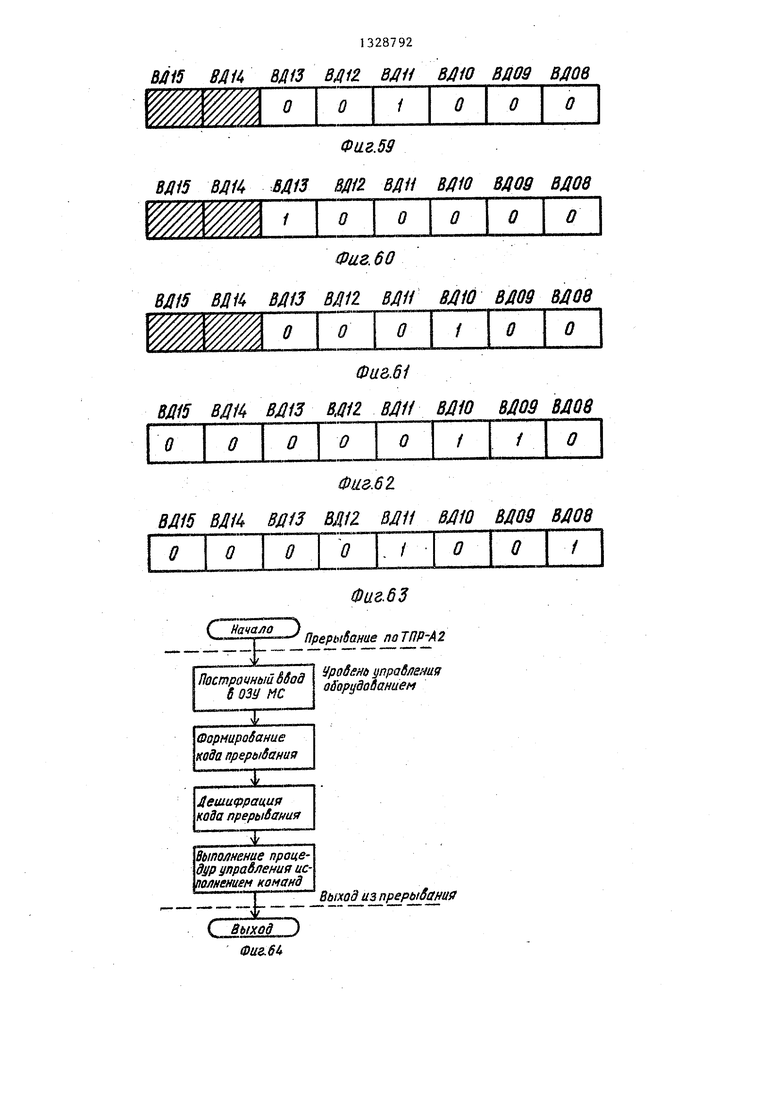
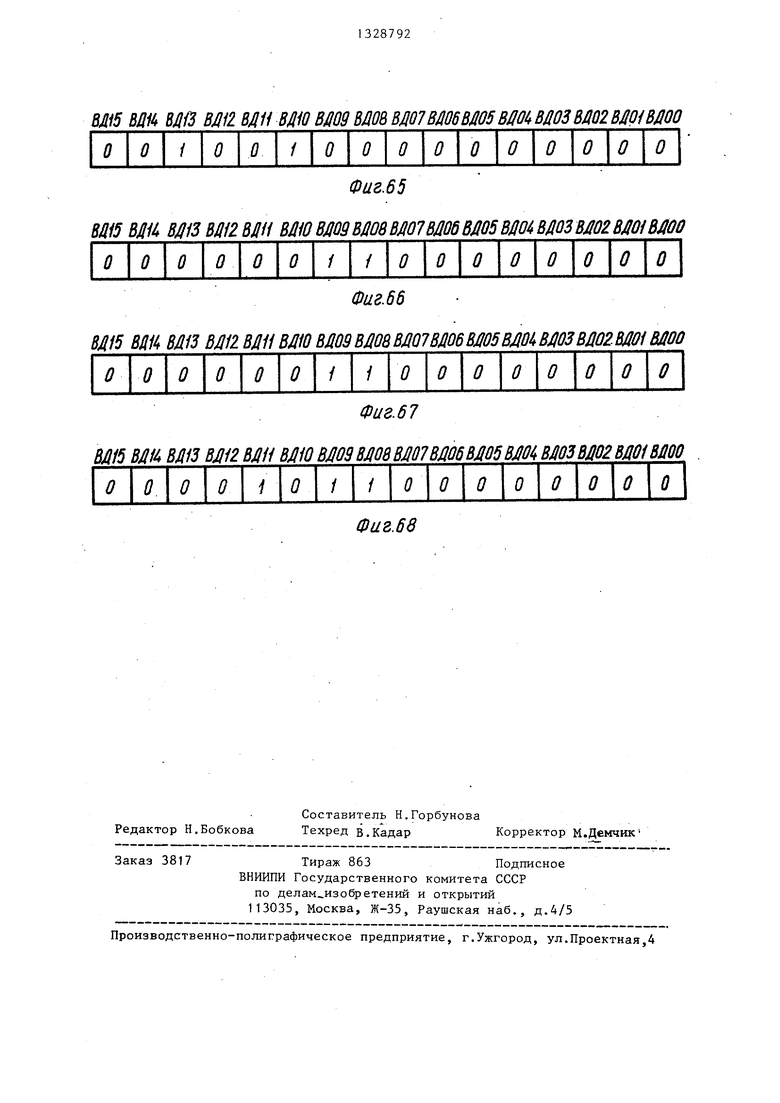
Изобретение относится к области вычислительной техники, в частности к цифровым системам управления технологическими процессами. Цель изобретения состоит в расширении функцио- нальньпс возможностей за счет увеличения числа исполнительных механизмов при ограниченном количестве аппаратных средств управления. Постав(Л ь« иг. 1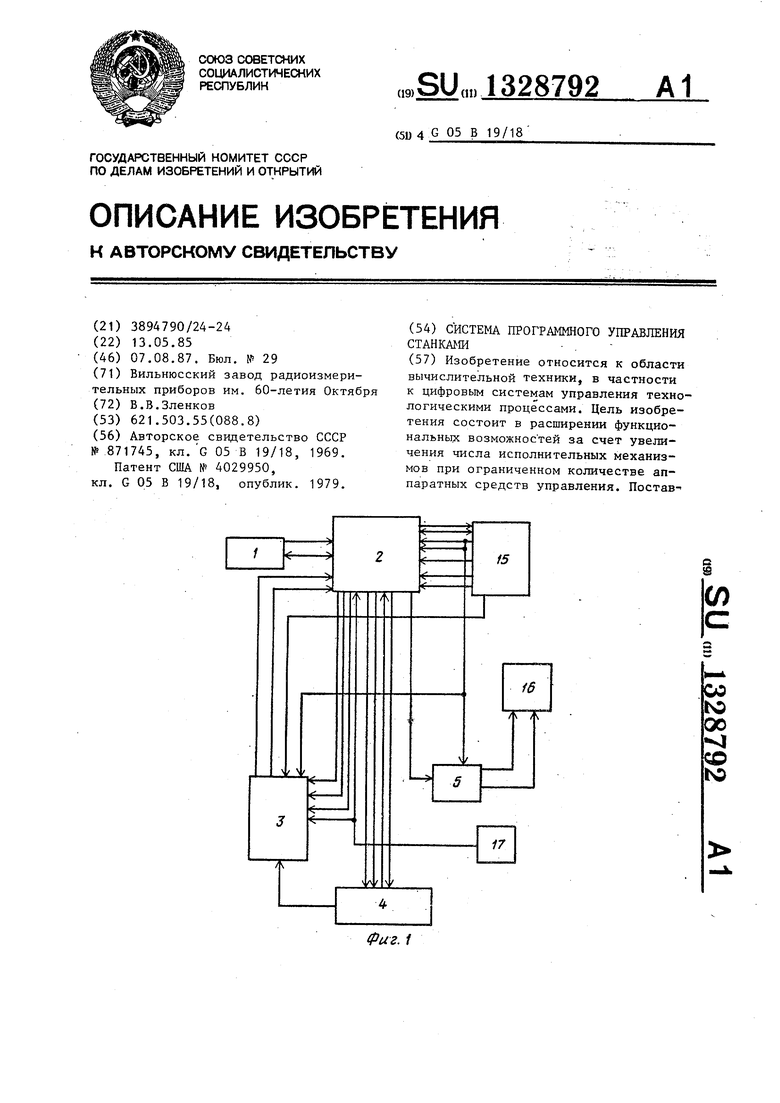
В4в-
вла
н.
блг
Ял« fSp-oaiaf У8 .ошУ8
вл f3 у}Г
, ..CSfLmuuS.oSui.
ОЯ, 13
ЕН
влек
%, Фие.5
CSp.oitt.eSm. 6Л13
бл13
6/1.6
В/1.6
бл2В 5л б
Фи&б
Влзо
Г
5л50:
.
блб
69
блга.
ML
70
5/
ТПР61 Влб
Фие-в
ал1.
йлгб- 6л.6
6л2в &г.б
ий.23
блзг
Ы23
блг
блг в/12в
Фие-i
Вл25
блП
§лЗв блЗО
Фаг.10
бл.30
5/1.30
Фег./2
;ftf
&t/7
Фа&а
Фие./4
в/чз
Hue. 15
В/1.13
бл7 С
ба.13
Фае. (6
Вл13
,&rJ7
Фиг.17
6a.il ВлП
(8
.г« Cnti
ад
Ж
Уч
гЦ - J
US
7П «
т
jgb
«г,
7
да.
I8S
We
tat
Sa.6
К
ff/ze
.%
т
tfS
MS
азя
Jir
HS
S/14. 6л.3 ВЛ13
Блб
F
HS
т,
HS
195,
J
MS
IK,
ISU&.I9
Фие.20
М4
ВА8
Is-Cufjta/ibi сомешения
i -cutm/w сдказвтетй 1 иананды ЧПУ
j: x -саыатсопряжения I Уровень: if-fi/iMa/ v coSMfтения t Wfl«™
-I- fj-Mep цпрабляющей, проераты
J
I -cutMMft IxaMiafjifi
(DiiiZI,
Фиг.15
BBfS
BBf4 BB13 8B1Z ВВП ВВЮ BB09 8808
ВВ15 Ш4Ш5 Ш2 ВВП BBfO ВВОЗ ВВОЗ ВВ07ВВ06ВВ05 ВВ04 ВВОЗ BB02BBOiBBOO
ВД07
Фае.29 ВД06 ВД05 ВД04 ВДОУ ВД02.
ВВ15
М/4
Фиг. 30 ев 13 8В iZ ВВП
Фаг.26
Фиг.27
Фаг.28
BUQi ВЛОО
ВВЮ ВВ09 ВВ08
Фиг.З/
С //gyg/ g
Прерывание по TfJP-SZ
Уробено у правления Заданиями
Boixod из прерь/Вания
Продень упраЬлетя за1ачана
lpoSeHi) дпрабления оВорудобанием
04
i 2
д /J /4 /5 /2 // /g Qg Qg g7 g6 05 g4 03 02 01 00
-i
n
0
{
Mp8
1Я яЯ1ятя1ш
HP 8
Метка конца очереди
Фиг. 33
С Канеи, Фиг.32
Mp8
1Я яЯ1ятя1ш
HP 8
Hpi
ММШН
Mpl
С Иачало
Выбор тередноа строка
Старание метки нулеВой строки
С Начало
Выбор очередной cmpOKU. из очереди заданий
Г конец J Фик.Зи
Фаг.Зб
С Начало
Выборка слаба
U.3 поля заданий.
ОЗи ление поля
Фиг.36
Нет
Формирование и быдача команды упрадления
j s-rz:
Фиг. 37
Am 15 /4 13 12 11 10 09 08 07 06 05 0 03 02 01 00
вд15втвл13 вдп BMii вт втвтвдо7втвло5втвмозвтвмо1вмоо
ВШ5
ВМ14 ВД13 ВД12. ВМа ВЛЮ ВД09 ВМОВ
Фие.О
твт ВЛ13 вт вмн вдю вдоэ вт вдо7 вмоб вдо5 вт вдозвтвйо1влоо
Фиг41
Фиг. 38
Фиг. 39
С Начало j
ВходИнрежш
Форнарованив ев- oSmeMug осистет tfUfnnoooio i/npaf аении
Фиг.
SMI ВШ ВД05 ВЛа ВШЗ. BSOZ В/101
тти
Фиг43
8Л15 ели ВЛ13 MI2 8М вдю вмз вАоввттшбвло вйО, влозви02 ВД01 am
т
у/а
УК2
С Конец 3вт
Код цепи
OTi
пн
Код цеди
WB no(Al(
)
- Л1 у и попр-вг
т
С Наиоло 3 -J ячноабмЛ,, ,Режим J
000
001
010
С J
Фиг 1,7
01 f WO . iOi
НО
///
Настройка ОС на быполнение пербого режима
Настройка ОС на бб1по/ ненае бторога режима
Настройка ОС на быпалнение третьего режинй.
Переходи программам о fpaSo/пка с fait ных cumi/ai4UU
Фиг.50
Выламение режима
С Конец J
8Д15М/4
ВМ13
ВЯН ВЛИ
ВДЮ ВД09 вдов
Выйод УП
В&од УЛ
Сброс сбоев
траоление тижением
носиттШ 1°
Старт- У8В
Фиг. 51
(/fe W W |
ПУСК ySBi
апис.ьсло5а УП
0 бходнои региб
11ереклю нае ЦЦ на программу о5радЪткиТПРА
Пр
Переходк програ- ммйм о Spa do тки cfouHiiix си/7}1 щт
СКонец 3
Останоб УВВ
Возбрат на оши5очноеш6о
mSmopmiu §дод слода УПб реажтрцтг
Фи8.53
Пере)(одк програ мман обработки сбойных си (плацаи
Ш5 W« ВВ13 BBi2 ВВП B8iO ВВОЗ SB08 BB07 BB06 8805 880 ВВОЗ ВВ02 B8Q1B800
Первый Saum УП
Фиг.5
ВД15 ВД14 ВД13 BJ2/2 ВЛИ
М15 вт .вл13 Bffiz влн влю ВЛ09 вдов
вт вт
Фиг, 5 5
ВД13 8т вми вт
Второй Saum УП
1 -OUflUt
ВЛЮ ВД09 ВДОВ
О
1
1
f)
8М09 вдов
ВЛ15 А7/4 ВД13 ВД11 ВДЮ 8Д09 ВДОВ
Фаг.бО
ВД15 ВД13 вт В да вдю вдо9 вдов
о
о
о
1
о
Фиа.61
ВД15 W4 ВМ13 вт вди вдю в доз вдов
Фт.бг
ВД15 вт вд13 вш вди вдю ВД09 вдов
()
Построчный &Sod 6 ОЗУ fiC
Фиг.63
Прерывание поТПР-А2
Уроденб упраб/ггтя одЪрудобанивм
Форниродание кода пркрыбания
Мешифрация кода npepbiSawsr
Выполнение процедур управления исполнением команд
odjisji pibtSaHusr
(Г Выход Фи&.6
вм15 вд1 вд{з вт вАивтвтьтвдо7втвло5втвтвтгвдр1вдоо
Фиг.65
ВД15 вт 8jsi3BmBjni вшовтвтвло1виобвдо5т втвтвдо1вт
ФагМ
ВД15 в/114 BmBmBaiiBmBm9BM08Bj iQ7BmBmBMo BmBm.
Фиг.67
вл15 вт ВД13 вт вла вт втвмоввло втвмо5вт втвтвтвт
Редактор Н.Бобкова
Составитель Н.Горбунова
Техред В.Кадар Корректор М.Демчик
Заказ 3817Тираж 863Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,Т
Фаг.68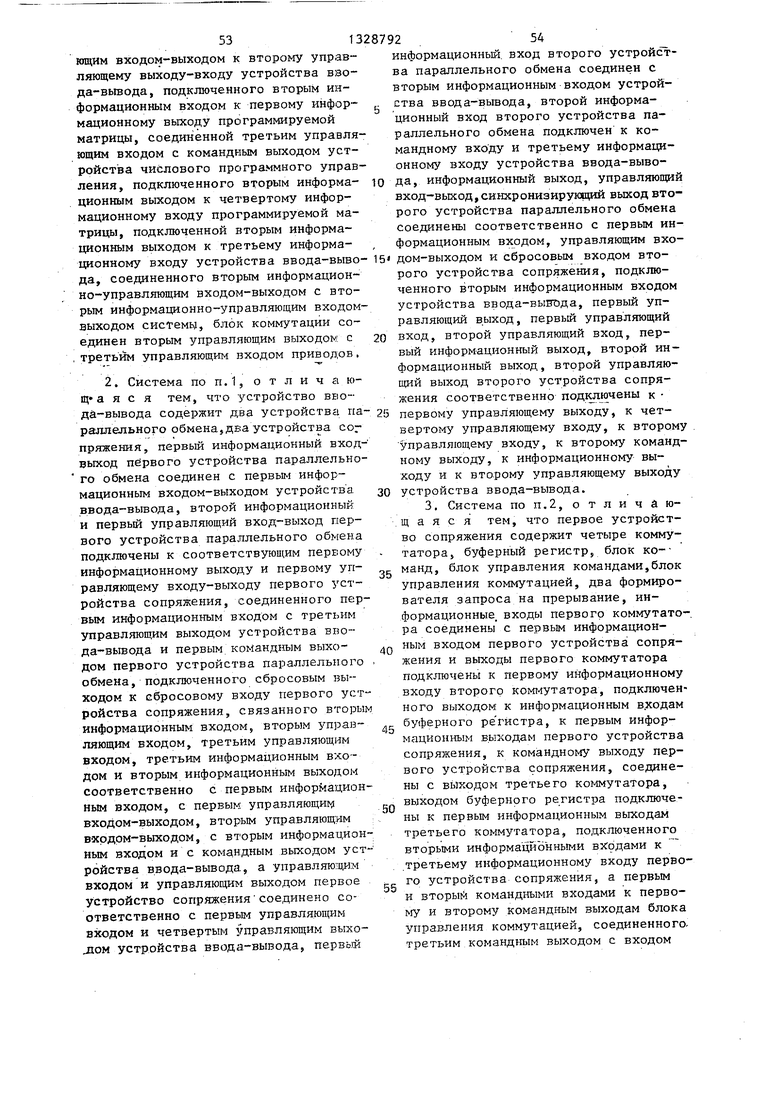
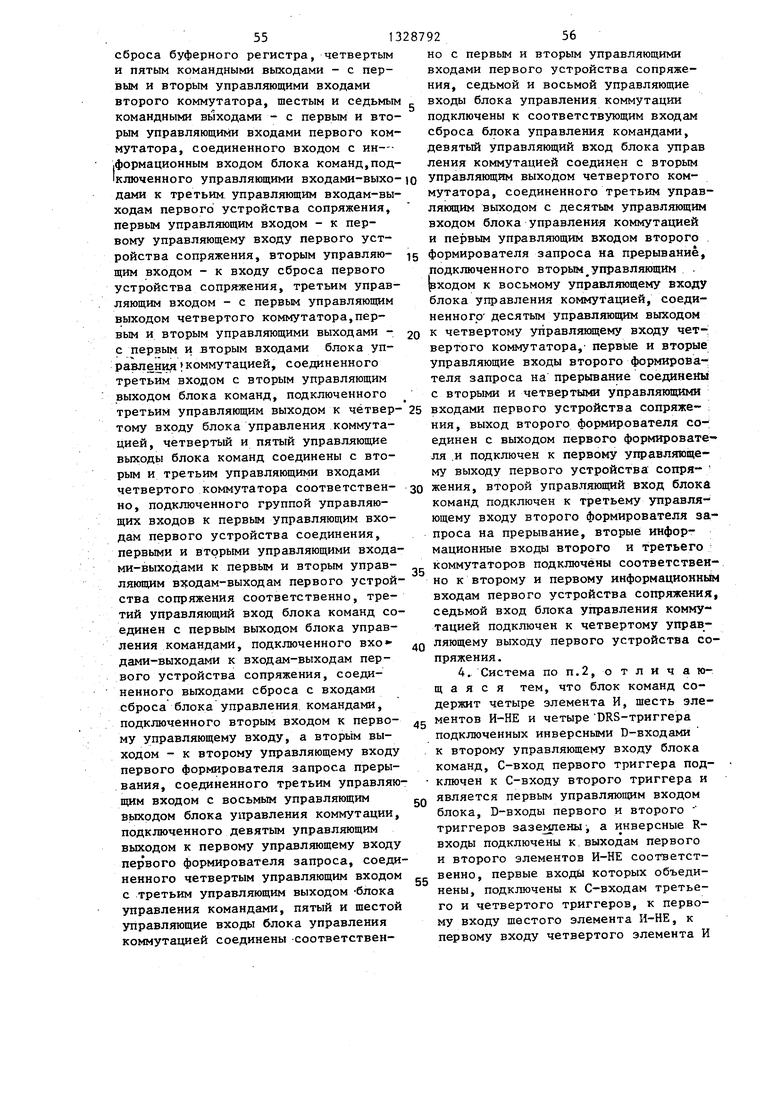
| Устройство для программного управления группой станков | 1970 |
|
SU871745A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США № 4029950, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
