I 1
Изо6рете1гае относится к машиностроению, и может быть использовано для автоматизации металлообработки и является усовершенствованием устройства по авт.св. № 921790.
Цепь изобретения - увеличение производительности труда и расширение технологических возможностей.
Указанная цель достигается путем обеспечения возможности одновремен- йой подачи к технологическому обору- дованию участка двух и более штук тары, причем конструкция грузозахватного устройства позволяет подавать тару различньк по конфигурации габаритов на различном уровне.
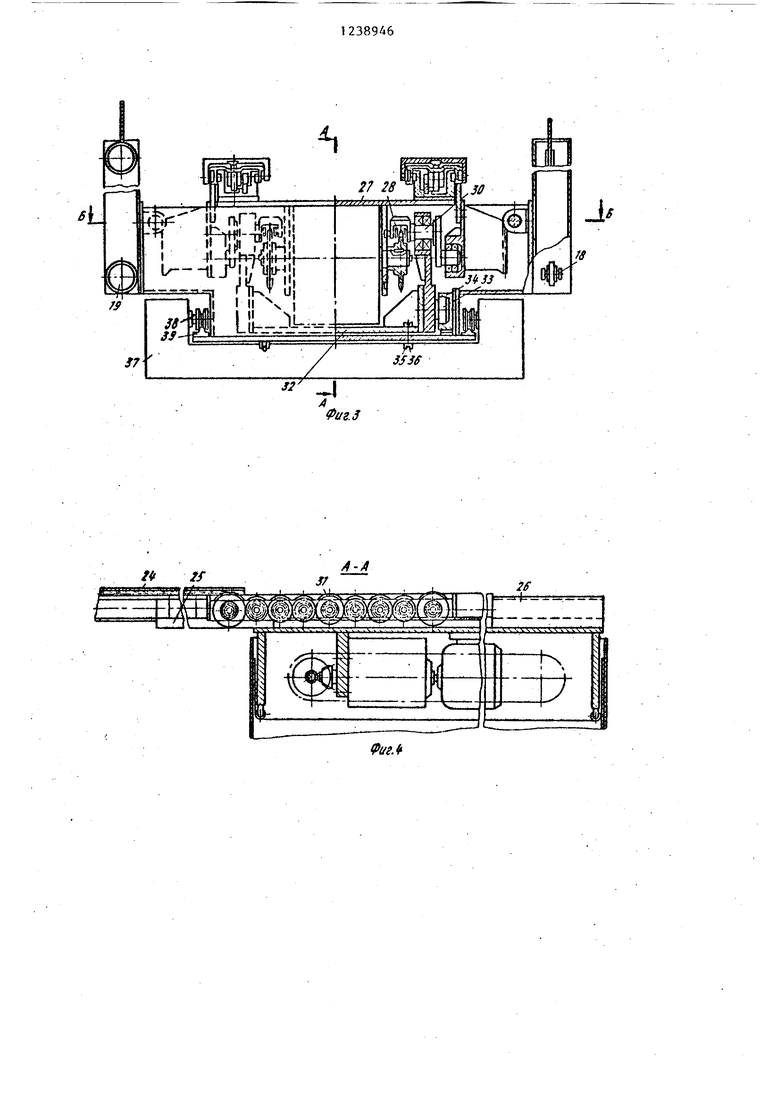
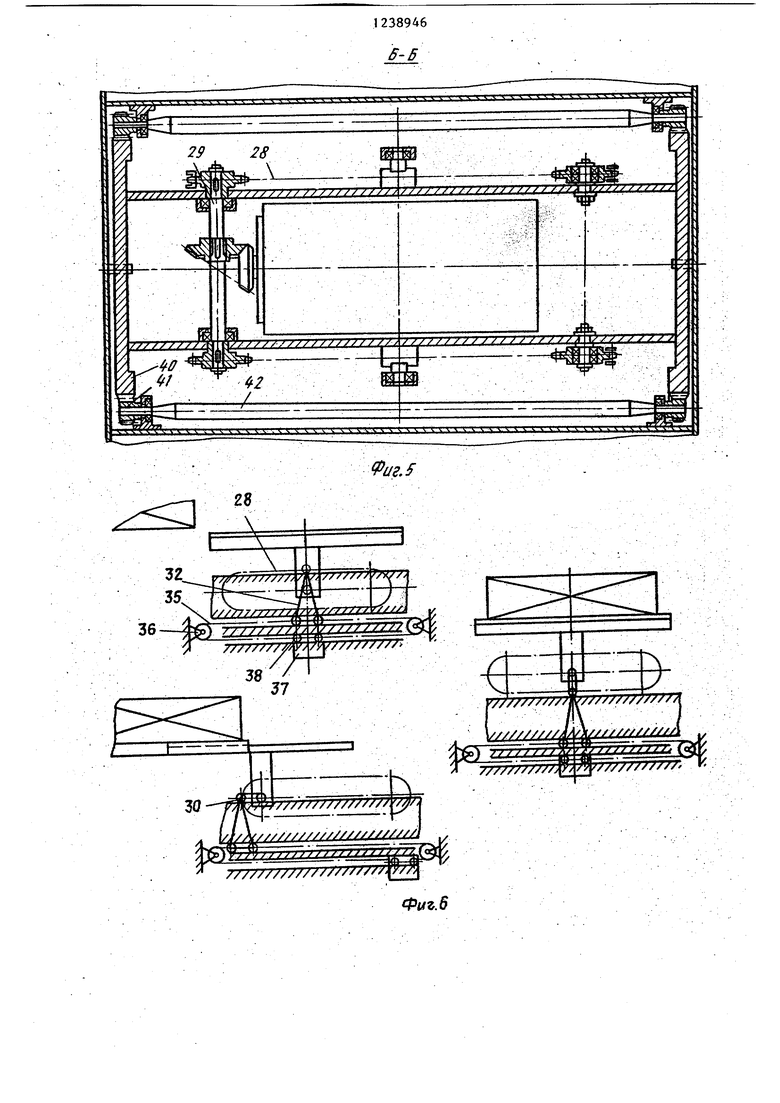
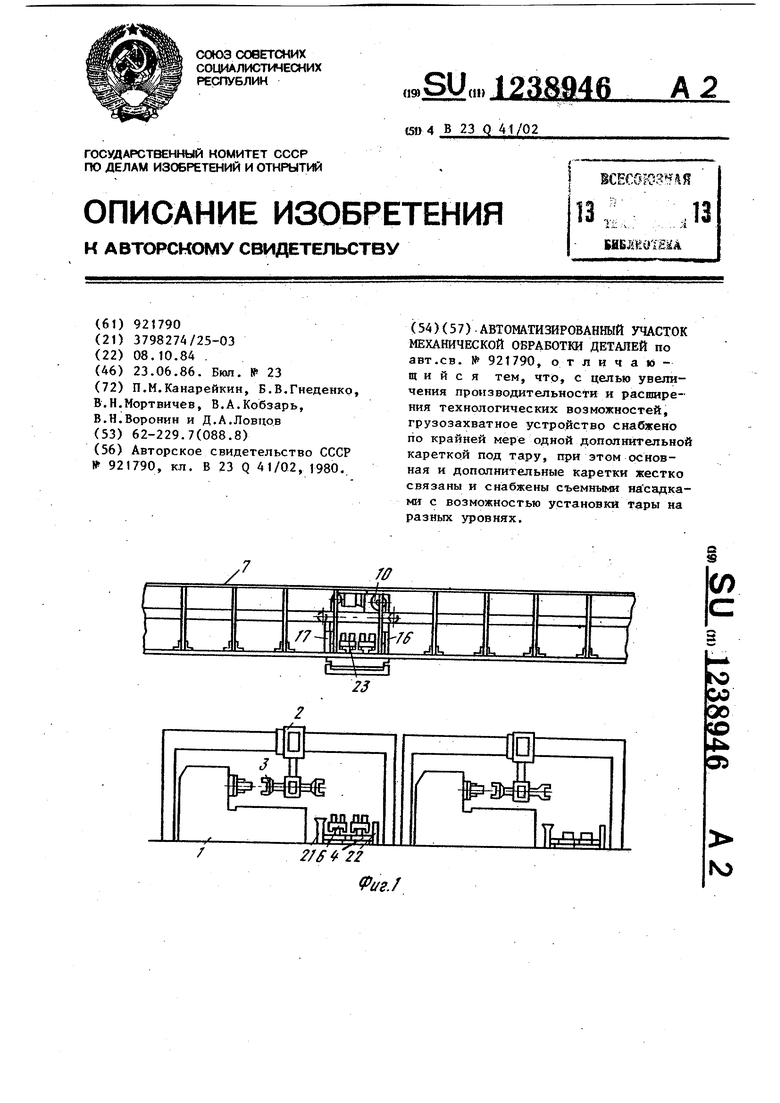
На фиг. i представлен автоматизированный участок, общий вид; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - грузозахватное устройство крана-штабелера участка; на фиг.4 разрез А-А на фиг. 3; на фиг.5 - разрез Б-Б на фиг. 3; на фиг. 6 - схема работы Грузозахватного устройства крана-штабелера; на фиг. 7 - 10 - варианты выполнения грузозахватного устройства.
Автоматизированный участок механической обработки деталей, управляемый от ЭВМ, состоит из автоматизированных технологических единиц, содержащих станок t с ЧПУ, станочный манипулятор 2 с захватной головкой 3 перемещающейся вдоль линии центров tTamca 1 и координатного стола 4, перемещающего от шагового привода 5 в направлении, перпендикулярном линии центров станка 1, тару 6 для за- готовок, готовых изделий, инструмента и т.д.
, Над автомат зированными технологи- ческими единицами установлен стеллаж 7 транспортнонакопительной систе мы, по направляющим 8 которого на катках 9 перемещается кран-штабе- лер 10, содержащий тележку 1Гс приводом горизонтального перемещения и с приводом 12 подьема, к которой на канатах 13 через блоки 14 подвеще а грузоподъемная площадка 15, при этом тележка 11 снабжена направляющими 16 и 17 для установочных катков 18 и 19 грузоподъемной площадки 15, а у каждой загрузочной станоч ной позиции 20, содержащей координат ный стол 4 и стол для тары с инструментом, установлены направляющие 21 и 22 для катков 18 и 19.
38946J
Грузоподъемная площадка 15 снабжена каретками 23 под таРУ с грузонесу- щими 24, промежуточными 25 и базовыми 26 секциями, причем базовые сек5 ции жестко соединены в блок 27 базовых секций, содержащий два цепных конвейера 28 с общим приводом, соединенные общими валами 29, закрепленными на цепях коленчатыми рычагами 30,
О причем они установлены на подщипни- ках в крайних промежуточных секциях 25 кареток 23, соединенных при помощи блока 31 шестерен и реек с гру- зонесущими секциями 24, и установлены
15 в общей на все каретки 23 подвижной опоре 32, установленной на катках 33 в направляющих 34 грузоподъемной площадки 15. Подвижная опора 32 соединена при помощи канатов 35 через бло20 ки 36 с противовесом 37, перемещающимся на катках 38 по направляющим 39 грузоподъемной площадки 15, соединенной с блоком базовых секций 26 при помощи реек 40, входящих в зацепление
25 с шестернями 41, установленными попар - но на валах 42.
При установке дополнительных кареток при использовании различной тары по конфигурации (фиг. 7 - 10) проме30 жуточные секции 25 кареток 23 соединяются планками 43 и 44 (фиг. 9 и 10), а при использовании тары с различным уровнем базирования под одну из тар на каретки установлены насадки 45
35 с помодью крепежа 46 (фиг. 10).
Автоматизированный участок работает следующим образом.
ЭВМ подает команду на микропроцессор, управляющий краном-штабелером 10, взять необходимый комплект тары 6 с заготовками, инструментом и т.п. из стеллажа 7 и подать на станочную загрузочную позицию 20 с координатным столом 4 и столом для инструмента, при этом из библиотеки программ ЭВМ передаются программы на станок 1 и микропроцессор, управляющий технологической единицей. Штабелер 10 пере- мещается по горизонтали до необходимой станочной позиции 20, после его остановки включается привод 12 подъема, и грузоподъемная площадка 15 опускается на канатах 13, перекинутых через блоки 14, при этом установочные катки 18 и 19 фиксируются в направляющих 21 и 22. После остановки грузоподъемной .площадки 15 включается привод цепных конвейе40
45
50
55
ров 28, которьтй при помощи коленчатых рычагов 30 вь(двигает промежуточную секцию 25, которая в свою очередь, вь(двигает грузонесущую секцию 24 через блок 31 шестерен, при этом общая подвижная опора 32 перемещается вместе с колекчатьттчи рычагами 30 на катках 33 по направляющим 34, и при помощи канатов 35 через блоки 36 подвижная опора 32 перемещает в противоположную сторону противовес 37, в исходном положении находящийся в центре тяжести грузоподъемной щтощадки 15. Когда коленчатые рычаги 30 проходят прямолиней- ный участок цепных конвейеров 28, общая подвижная опора 32 останавливается, а с ней и противовес 37, при этом эти рычаги, поворачиваясь, поднимают (или опускают) блок 27 базо- вых секций удерживаемый в равновесии валами 42 при помощи реек 40 и шестерен 41.
ГрузонесУщие секции 24 снимают или устанавливают одну, две или не- сколько щтук тары, после прохождения криволинейного участка цепных конвейеров 28 коленчатые рачаги 30 возвращают секции кареток 23 и противовес 37 в исходное положение, затем Привод 12 подъема поднимает грузоподъемную площадку 15 вверх, при этом катки 18 и 19 фиксируются в направляющих 16 и 17 тележки 11. После установки тары 6 на позицию 20 наладчик устанавливает инструмент и приспособление на станок и дает команду на обработку, при этом станочный манипулятор 2 из исходного нулевого положения перемещается до координатного стола 4 , находящегося в нулевом положении, и его захват 3 снимает заготовку из тары 6 и устанавливает в патрон станка. 1. От станка подача тары в стеллажи-накопители 7 осуществляется аналогичным образом, причем подача тары ыожет производиться в обе стороны. В период работы одного станка 1 кран-штабелер 10 обслуживает другие станки.
Когда возникает потребность установить тару на рольганг, одновременно обрабатывать две и более тары (фиг. 7 и 8), тары специальной и увеличенного габарита (фиг. 9 и 10), блок базовых секций дополняется каретками 23, которые связываются между собой планками 43 и 44, а при использовании тары с различным уровнем базирования на одну из кареток установлены насадки 45 с помощью крепежа 46 (фиг. 10).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный участок механической обработки деталей | 1980 |
|
SU921790A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| Автоматизированный участок механической обработки деталей | 1983 |
|
SU1161314A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| Кран-штабелер | 1980 |
|
SU893846A1 |
| Грузоподъемная платформа крана- шТАбЕлЕРА | 1979 |
|
SU793906A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Автоматизированный участок | 1983 |
|
SU1183351A1 |

S7
Фиг.з
/« //
A-A
б-Б
US.ff
777777777777W77777777/7777/ //////////AM
J f f f f/77
ff//f/////
{ ((it С
//// / / / / / /
ff///////ff/
Фиг.6
УстаноЗнл однотипной тары на рольганг
Тара специальная с сринсаторам по центру бля 3amft)KKu на коардинагг/
Фиг.7
Фиг. 8
Тара убели енно о габарита
Фиг. 9
Тара разного уроВнр /
ЧЗ,ЧЦ ,V«
Фиг. Ю
| Автоматизированный участок механической обработки деталей | 1980 |
|
SU921790A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
