| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| Грузоподъемная площадка крана-штабелера | 1990 |
|
SU1773814A1 |
| Склад для хранения штучных грузов | 1981 |
|
SU969611A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Грузозахват стеллажного кранаштабелера | 1988 |
|
SU1594080A1 |
| ПОДВЕСНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1992 |
|
RU2076841C1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| КРАН-ШТАБЕЛЕР | 1972 |
|
SU419469A1 |
| Грузоподъемная площадка крана-штабелера для поддонов с пазами под грузозахватные элементы | 1982 |
|
SU1058835A1 |
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1557020A1 |
Использование; конструкции стеллажных кранов-штабелеров, в частности к грузозахватным устройствам. Сущность изобретения: грузозахватное устройство состоит из подъемно-опускной консоли (ПК) 1, смонтированной на колонне 3 крана-шгабе- лера, На консоли в подшипниках смонтирована вертикальная ось, на которой в верхней части закреплен мальтийский крест (МК) 6, а в нижней - балка (Б) 7 с направляющими. МК 6 выполнен с двумя радиальными пазами, расположенными под 90° друг к другу. На Б 7, с возможностью перемеще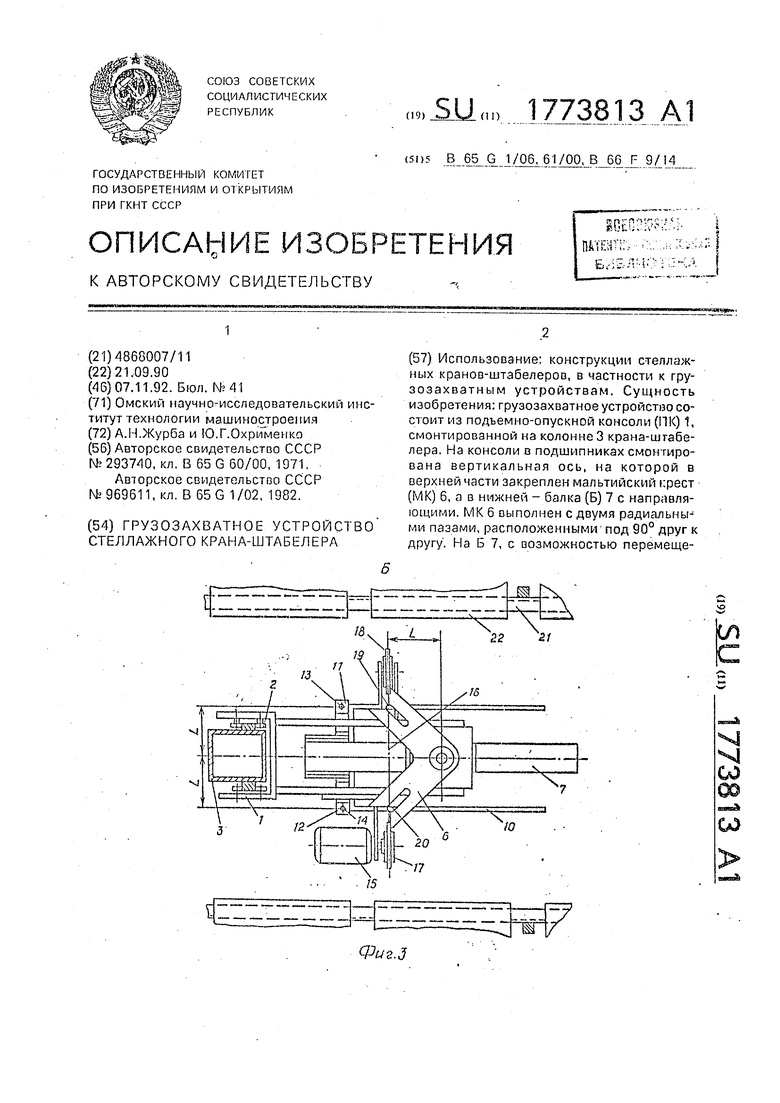
Фиг.з
ния, смонтирована каретка (К) 9 с вилочным захватом 10 и двумя кронштейнами 11 и 12, расположенными симметрично по обе стороны от ее продольной оси симметрии. В каждом из кронштейнов 11 и 12 выполнены вертикальные отверстия (О) 14. На ПК 1 размещено входное звено механизма поворота, состоящее из электродвигателя 15, цепи (Ц) 16, огибающей звездочки 17 и 18. Ц 16 снабжена вертикально расположенными пальцами (П) 19, расстояние между которыИзобретение относится к стеллажным кранам-штабелерам, в частности к грузозахватным устройствам, монтируемым на стеллажных кранах-штабелерах.
Известен рамный штабелер, содержащий подъемную каретку, оборудованную вилами, выдвигаемыми посредством бесконечного цепного привода, огибающего конечные звездочки и снабженного поводками, которые установлены с внешней стороны пластин цепи, а их продольная ось совпадает с делительной окружностью конечных звездочек.
Известен склад для хранения штучных грузов, содержащий грузоподъемную площадку, закрепленную на вертикальной оси, размещенной на консоли с возможностью поворота. На вертикальной оси закреплена коническая шестерня. Поворот грузоподъемной площадки производится при помощи размещенного на консоли электродвигателя, на валу которого закреплено водило, через четырехпозиционный мальтийский крест с конической шестерней, размещенный с возможностью поворота на консоли, и шестерню, закрепленную на вертикальной оси. Выдвижение захвата производится расположенным на грузоподъемной площадке электродвигателем через коническую передачу и ходовой винт,
Недостатком известного устройства является наличие отдельного привода вы- движения захвата .на поворотной грузоподъемной площадке. Это усложняет конструкцию самой поворотной грузоподъемной площадки, требует наличия дополнительных сложных кинематических звеньев: конической зубчатой пары, ходового еинта и т.п.
Целью изобретения является упрощение конструкции.
Указанная цель достигается тем, что в известном грузозахватном устройстве стеллажного крана-штабелера выдвижение и
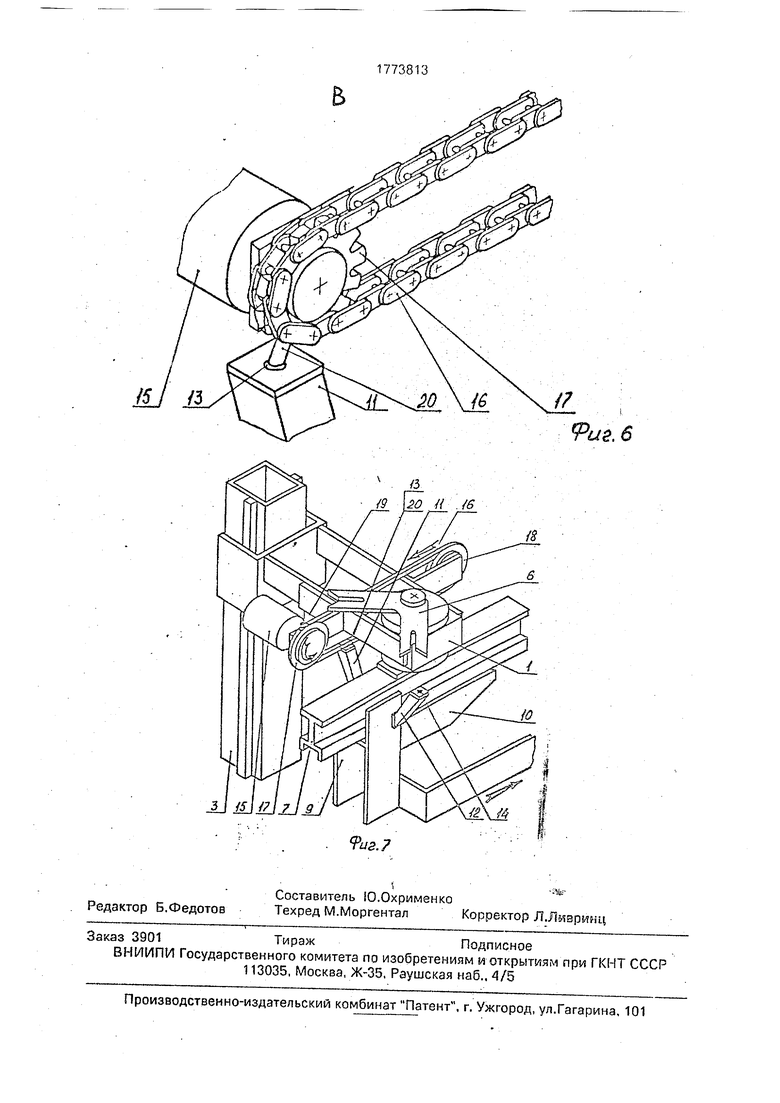
ми равно расстоянию между периферийными концами пазов МК 6. Расстояние от Ц 16 до оси поворота равно расстоянию от оси О 14 до продольной оси симметрии К 9. При перемещении Ц 16 П 19 поворачивает fyjK. 6 и соединенную с ним осью Б 7 на 90о-; а другой П 19, огибая звездочку 17, входит в О 14 и выдвигает К9. Повороти выдвижение в.другую сторону осуществляются вращением электродвигателя 15 в противоположном направлении. 7 ил.
поворот захвата осуществляются одним механизмом поворота балки, включающим в себя связанное с приводом входное звено, имеющее палец для захода в расположенные перпендикулярно друг другу радиальные пазы выходного поворотного звена, соединенного с вертикальной осью балки. Входное звено механизма поворота представляет собой замкнутый цепной орган,
огибающий закрепленные на консоли посредством горизонтальных осей звездочки, и снабжено дополнительным пальцем, который закреплен на цепном органе на расстоянии от основного, равном расстоянию
между периферийными концами пазов выходного поворотного звена. При этом на каретке симметрично по обе стороны от ее продольной оси симметрии смонтированы кронштейны с отверстиями, диаметр которых больше диаметра пальцев, для захода последних в эти отверстия.
Сопоставление с прототипом показывает, что данное грузозахватное устройство стеллажного крана-штабелера отличается
тем, что входное поворотное звено выполнено с двумя радиальными пазами, представляет собой замкнутый цепной орган, огибающий закрепленные на консоли по- средством горизонтальных осей звездочки,
и снабжено дополнительным пальцем, который закреплен на цепном органе на расстоянии от основного, равном расстоянию между периферийными концами пазов выходного поворотного звена. При этом на
каретке симметрично по обе стороны от ее продольной оси симметрии смонтированы кронштейны с отверстиями, диаметр которых больше диаметра пальцев, для захода последних в эти отверстия. Таким образом,
данное техническое решение соответствует критерию изобретения новизна. Сравнение его не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них
признаки, отличающие это грузозахватное устройство от прототипа, что позволяет сделать выоод соответствии критерию изобретения существенные отличия.
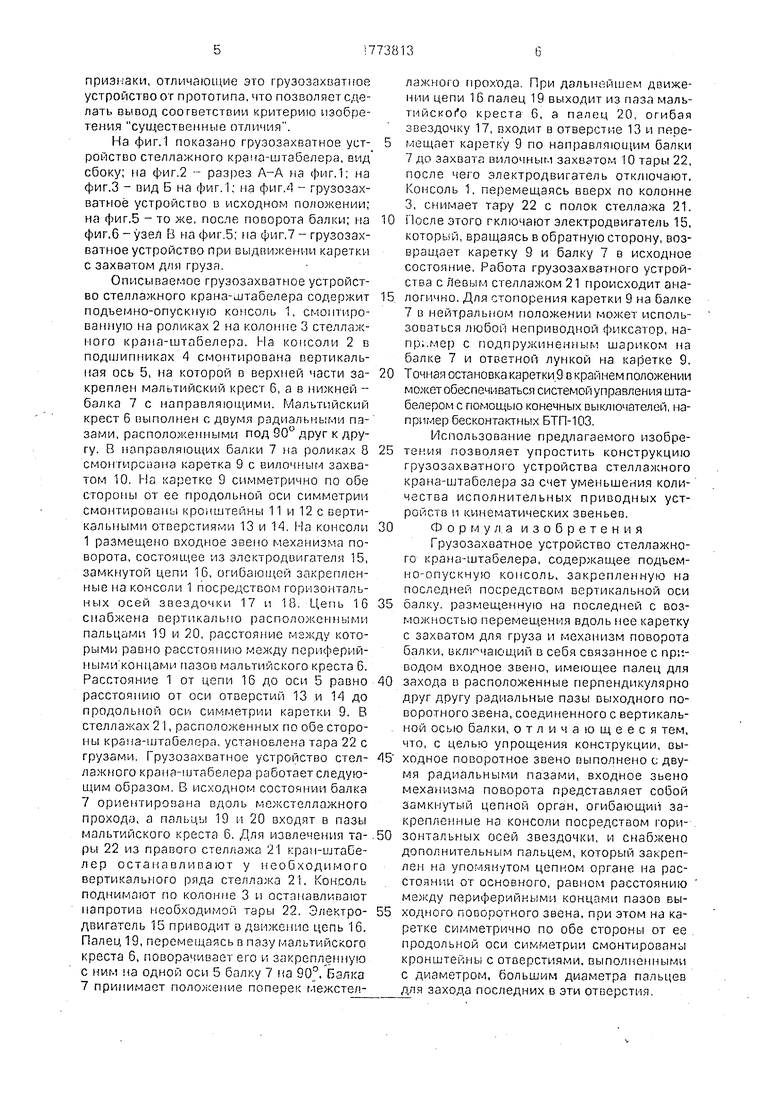
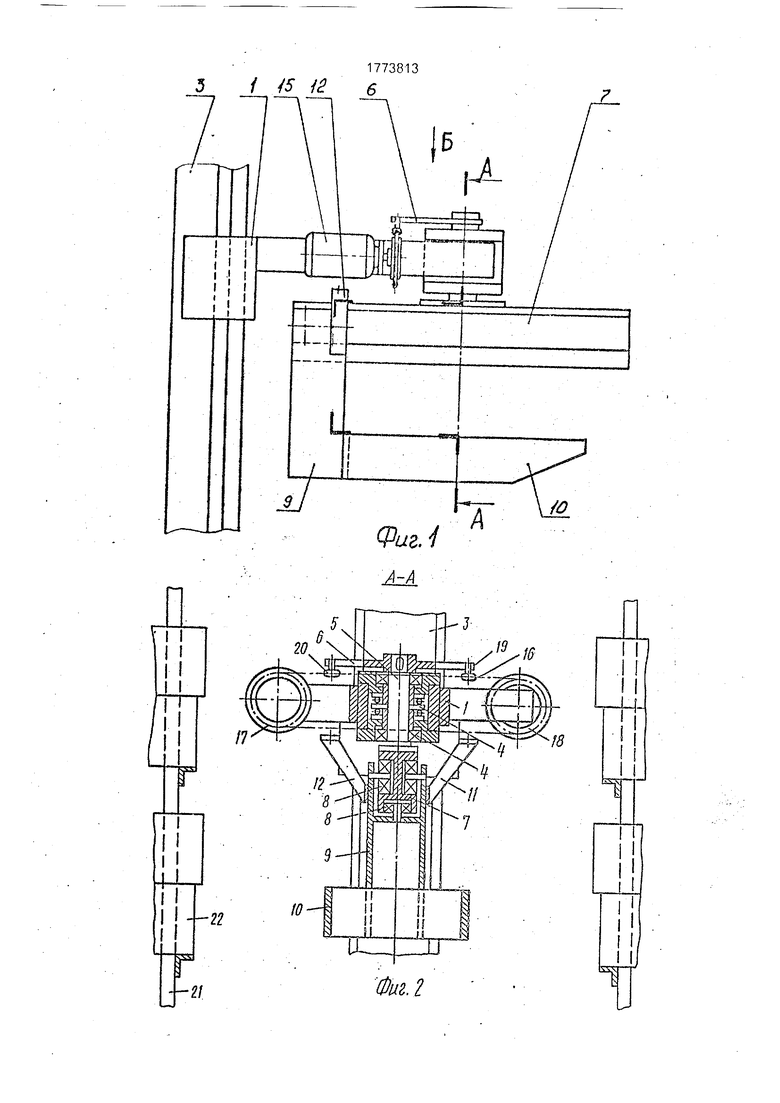
На фиг.1 показано грузозахватное уст- ройство стеллажного крана-штабелера, вид сбоку; на фиг.2 -- разрез А-А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг. - грузозахватное устройство в исходном положении; на фиг,5 -то же, после поворота балки; на фиг.6 - узел В на фиг.5; на фиг.7 - грузозахватное устройство при выдвижении каретки с захватом для груза.
Описываемое грузозахватное устройство стеллажного крана-штабелера содержит подъемно-опускную консоль 1, смонтированную на роликах 2 на колонне 3 стеллажного крана-штабелера. На консоли 2 в подшипниках 4 смонтирована вертикальная ось 5, на которой в верхней части за- креплен мальтийский крест 6, а в нижней - балка 7 с направляющими. Мальтийский крест 6 выполнен с двумя радиальными пазами, расположенными под 90° друг к другу. В направляющих балки 7 на роликах 8 смонгирС1зана каретка 9 с вилочным захватом 10. На каретке 9 симметрично по обе стороны от ее продольной оси симметрии смонтированы кронштейны 11 и 12 с вертикальными отверстиями 13 и 14. На консоли 1 размещено входное звено механизма поворота, состоящее из электродвигателя 15, замкнутой цепи 16, огибающей закрепленные на консоли 1 посредством горизонтальных осей звездочки 17 и 18. Цепь 16 снабжена вертикально расположенными пальцами 19 и 20, расстояние мэжду которыми равно расстоянию между периферий- пыми концами пазов мальтийского креста 6. Расстояние 1 от цепи 16 до оси 5 равно расстоянию от оси отверстий 13 и 14 до продольной оси симметрии каретки 9. В стеллажах 2 I, расположенных по обе стороны крапа-штабелера,установлена тара 22 с грузами. Грузозахватное устройство стел- лажного краиа-штабелера работает следующим образом. В исходном состоянии балка 7 ориентирована вдоль межстеллажного прохода, а пальцы 19 и 20 входят в пазы мальтийского креста 6. Для извлечения та- ры 22 из правого стеллажа 21 кран-штабе- лер останавливают у необходимого вертикального ряда стеллажа 21. Консоль поднимают по колонне 3 и останавливают напротив необходимой тары 22. Электро- двигатель 15 приводит в движение цепь 16. Палец 19, перемещаясь в пазу мальтийского креста 6, поворачивает его и закрепленную с ним на одной оси 5 балку 7 на 90°. Балка 7 принимает положение поперек межстеллажного прохода. При дальнейшем движении цепи 16 палец 19 выходит из паза маль- тмйског о креста 6, а палец 20, огибая звездочку 17, входит в отверстие 13 и перемещает каретку 9 по направляющим балки 7 до захвата вилочным захватом 10 тары 22, после чего электродвигатель отключают. Консоль 1. перемещаясь вверх по колонне 3, снимает тару 22 с полок стеллажа 21. После этого гключают электродвигатель 15, который, вращаясь в обратную сторону, возвращает каретку 9 и балку 7 в исходное состояние. Работа грузозахватного устройства с Левым стеллажом 21 происходит аналогично. Для стопорения каретки 9 на балке 7 в нейтральном положении может использоваться любой неприводной фиксатор, например с подпружиненным шариком на балке 7 и ответной лункой на каретке 9. Точ 1эя остановка каретки 9 в крайнем положении может обеспечиваться системой управления шта- белером с помощью конечных выключателей, например бесконтактных БТП-103.
Использование предлагаемого изобретения позволяет упростить конструкцию грузозахватного устройства стеллажного крана-штабелера за счет уменьшения количества исполнительных приводных устройств и кинематических звеньев. Формула изобретения Грузозахватное устройство стеллажного крана-штабелера, содержащее подъемно-опускную консоль, закрепленную на последней посредством вертикальной оси балку, размещенную на последней с возможностью перемещения вдоль нее каретку с захватом для груза и механизм поворота балки, включающий в себя связанное с приводом входное звено, имеющее палец для захода в расположенные перпендикулярно друг другу радиальные пазы выходного поворотного звена, соединенного с вертикальной осью балки, отличающееся тем, что, с целью упрощения конструкции, выходное поворотное звено выполнено с двумя радиальными пазами, входное звено механизма поворота представляет собой замкнутый цепной орган, огибающий закрепленные на консоли посредством горизонтальных осей звездочки, и снабжено дополнительным пальцем, который закреплен на упомянутом цепном органе на расстоянии от основного, равном расстоянию между периферийными концами пазов выходного поворотного звена, при этом на каретке симметрично по обе стороны от ее продольной оси симметрии смонтированы кронштейны с отверстиями, выполненными с диаметром, большим диаметра пальцев для захода последних в эти отверстия.
Фиг75
S773813
Фиг. 6
Уиг.7
| РАМНЫЙ ШТАБЕЛЕР | 0 |
|
SU293740A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
