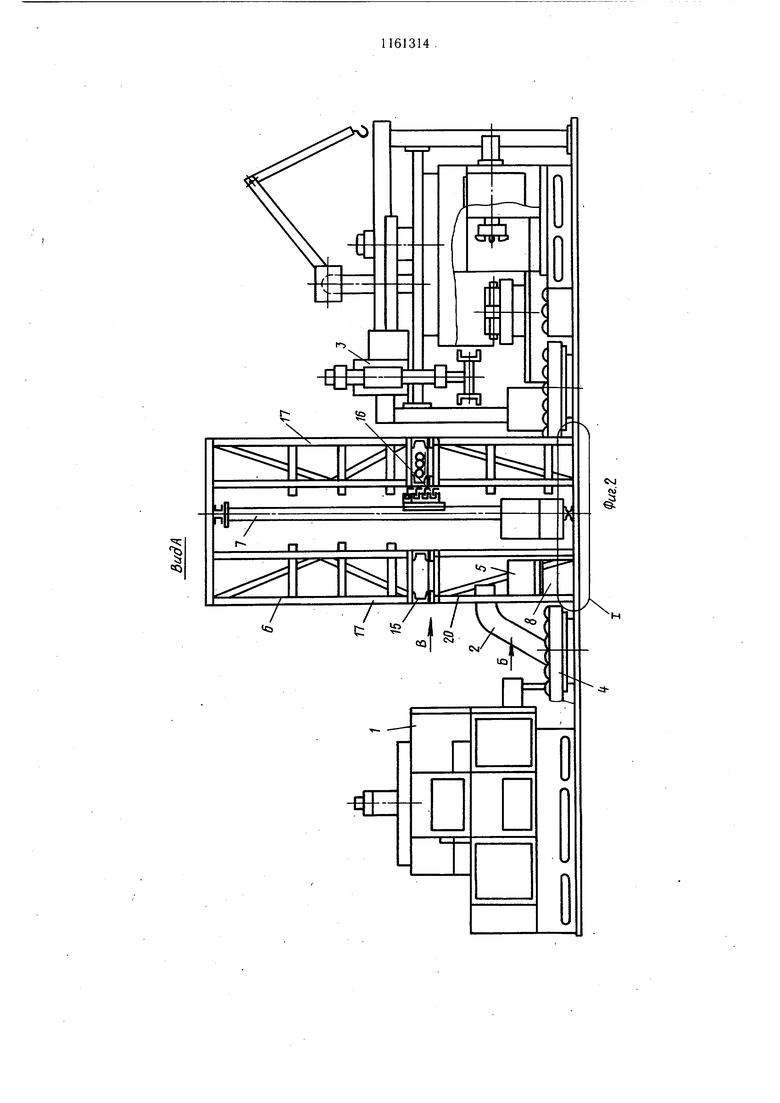
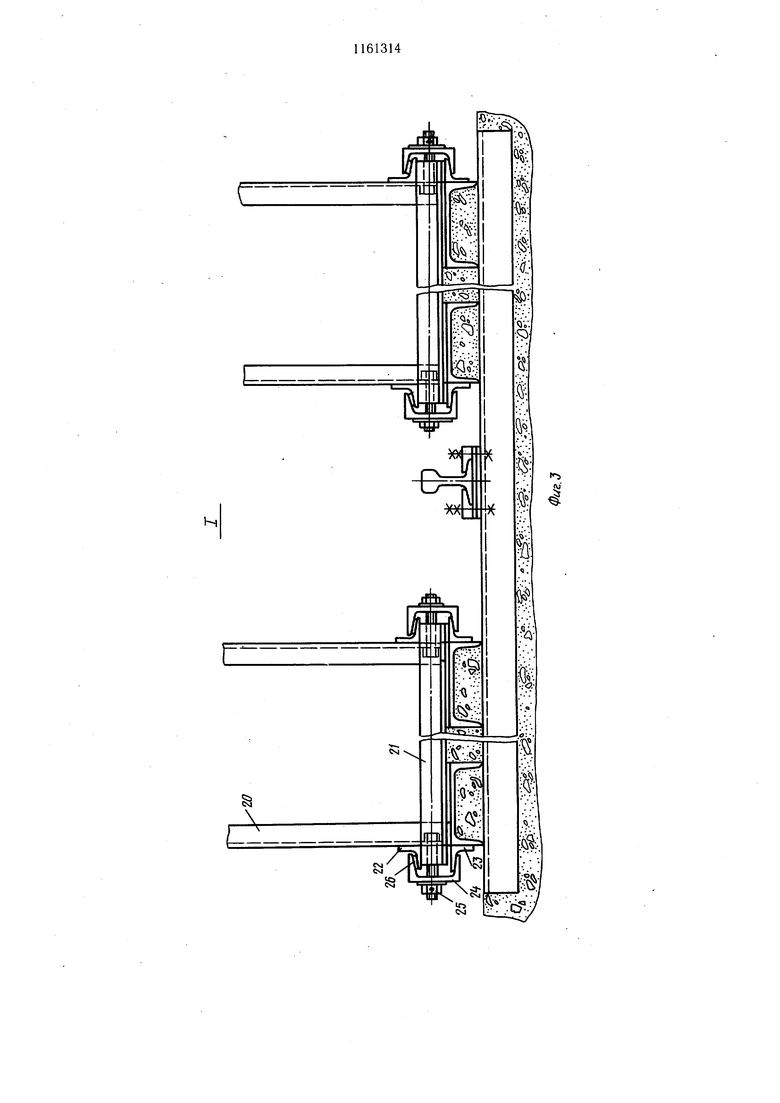
Изобретение относится к машиностроению и может быть использовано для автоматизации металлообработки. Целью изобретения является расширение технологических возможностей посредством обеспечения возможности образования отдельных секций под приемовыдачные позиции вне зависимости от шага расположения ячеек стеллажа. На фиг. I изображен участок, вид в плане;на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - вид В на фиг. 2; на фиг. 6 - узел II на фиг. 4; на фиг. 7 - манипулятор, вид в плане; на фиг. 8 - вид Г на фиг. 7 Автоматизированный участок механической обработки деталей, управляемый от ЭВМ, состоит из автоматизированных технологических единиц, содержащих станок 1 с ЧПУ, с транспортером 2 для удаления стружки, устройства для подачи и съема заготовок со станка 1, например станочного робота 3, манипулятора 4 подачи тары 5 накопителя для заготовок и деталей. Автоматизированные технологические единицы соединены стеллажом 6 транспортно-накопительной системы со штабелером 7 и секциями 8 приема-выдачи, снабженными лотками 9, установочными штырями 10 с приводами их выдвижения 11, катками 12 и 13, причем катки 12 выполнены профилированными, по форме направляющих 14 тары 5 накопителя. Стеллаж 6 транспортно-накопительной системы выполнен в виде двух пар этажей стоек, соединенных продольными и поперечными связями растяжками и разделенных жесткой рамой 15, выполненной пустотелой, например, из швеллеров с разноположенными внутри ее электро-, пневмо- гидросистемами, а с внутренней стороны стеллажа в проезде на ней установлены и датчики 16 для системы адресования штабелера 7. Верхние стойки 17 стеллажа 6 снабжены опорными элементами 18 в виде уголков и соединены с рамой 15 болтами 19, нижние стойки 20 снабжены в верхней и нижней части опорными элементами 21 в виде уголков и в нижней части клиновым элементом 22 в виде швеллера или части его. причем этот клиновой элемент 22 установлен на стойках 20 в отраженном виде с аналогичным клиновым элементом 23, заложенным в фундамент стеллажа 6. Нижние стойки 20 соединяются с фундаментом при помощи скоб 24, болтовых соединений 25 и регулируются прокладками 26, а с рамой 15 соединяются при помощи клиновых прокладок 27 и болтовых соединений 28. Манипулятор 4 (фиг. 7) содержит станину 29 с установленной на ней поворотной рамой 30, установленной на станине с возможностью поворота относительно вертикальной оси при помощи привода 31, при этом рама 30 содержит два блока катков 32, два схвата 33 для двух тар, причем схваты 33 снабжены приводом горизонталь ного перемещения 34. Работа автоматизированного участка осуществляется следующим образом. ЭВМ подает команду на процессор, управляющий краном-щтабелером 7, взять тару-накопитель 5, приехать и подать ее на секцию 8 приема-выдачи. Тара штабелером 7 опускается на секцию 8 при помощи лотка 9, профилированных катков 12, направляющих 14 тары-накопителя 5, ориентируется и фиксируется штырем 10 в отверстие тары-накопителя и при помощи его привода 11, затем манипулятор 4 подачи тары-накопителя 5 подает тару к станочному роботу 3, при этом штырь 10 при помощи привода 11 расфиксирует тару, станочный робот 3 подает заготовку в станок 1. Манипулятор работает следующим образом. Когда требуется взять тару с секции 8, манипулятор перемещает схват 33 в сторону тары, цепляет ее и скатывает ее на свой блок катков 31, затем поворачивается в сторону позиции станочного робота 3. После этого другая тара с обработанными деталями, находящаяся на втором блоке катков 32, вторым схватом 33 скатывается на секцию 8, при этом манипулятор 4 может установить или снять тару с любого стола, расположенного по окружности его поворота, причем станочный робот 3 может брать детали с манипулятора 4 или с любого стола, на который он установит тару с деталями. При замене установки оборудования поджимаются клиновые прокладки 27, освобождается болтовое соединение 28, прокладки 27 вынимаются, затем освобождают болтовое соединение 25 и снимают скобы 24. Нижняя стойка 20 свободна и ее вынимают, а на ее место могут установить секцию 8 приема-выдачи для тары-накопителя 5 как для минипулятора 4, так и для транспортера 2 для удаления стружки, при этом секции 8 приема-выдачи могут устанавливаться в независимости от щага стоек 20, щага ячеек стеллажа.
45
&идВ
.5
.Ч
и
11
Фиг. 6
Jf
J2
Г
33
32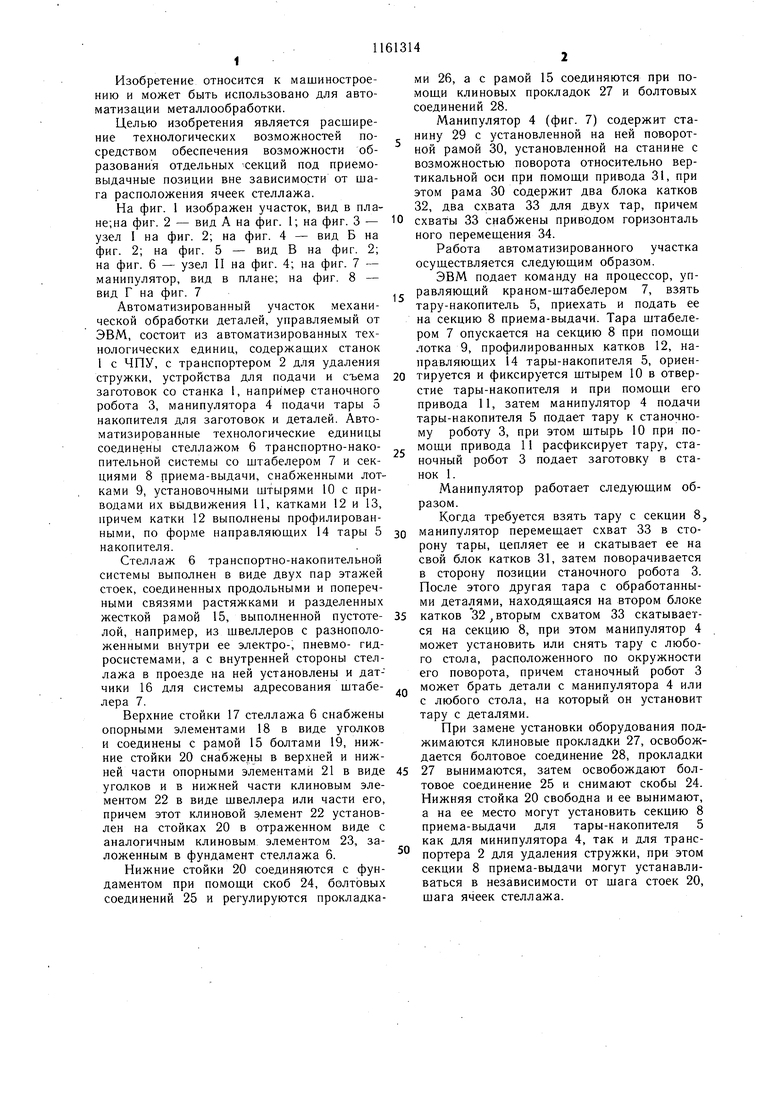
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный участок механической обработки деталей | 1980 |
|
SU921790A1 |
| Автоматизированный участок механической обработки деталей | 1984 |
|
SU1238946A2 |
| Гибкая производственная система | 1987 |
|
SU1491663A1 |
| Автоматизированный участок | 1983 |
|
SU1183351A1 |
| Автоматизированная транспортно-накопительная система | 1986 |
|
SU1351750A1 |
| Автоматизированная транспортно-накопительная система | 1988 |
|
SU1648732A1 |
| Автоматизированный технологический комплекс | 1987 |
|
SU1509225A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| Гибкая производственная система | 1986 |
|
SU1373535A1 |
| Пульт управления работой производственного участка и склада | 1976 |
|
SU618812A1 |

Г. АВТОМАТИЗИРОВАННЫЙ УЧАСТОК МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ, содержащий металлорежущие станки, устройства для подачи тары с заготовками к станкам, стеллаж с ячейками для размещения тары и приемовыдачных позиций, и кран-щтабелер, отличающийся тем, что, с целью расщирения технологических возможностей, стеллаж выполнен в виде двух этажей стоек и установленной между ними рамы, закрепленной на верхних стойках, при этом стойки нижнего этажа установлены с возможностью перемещения вдоль упомянутой рамы. 2. Участок по п. 1, отличающийся тем, что приемовыдачные позиции снабжены направляющими лотками, профилированными роликами и фиксаторами.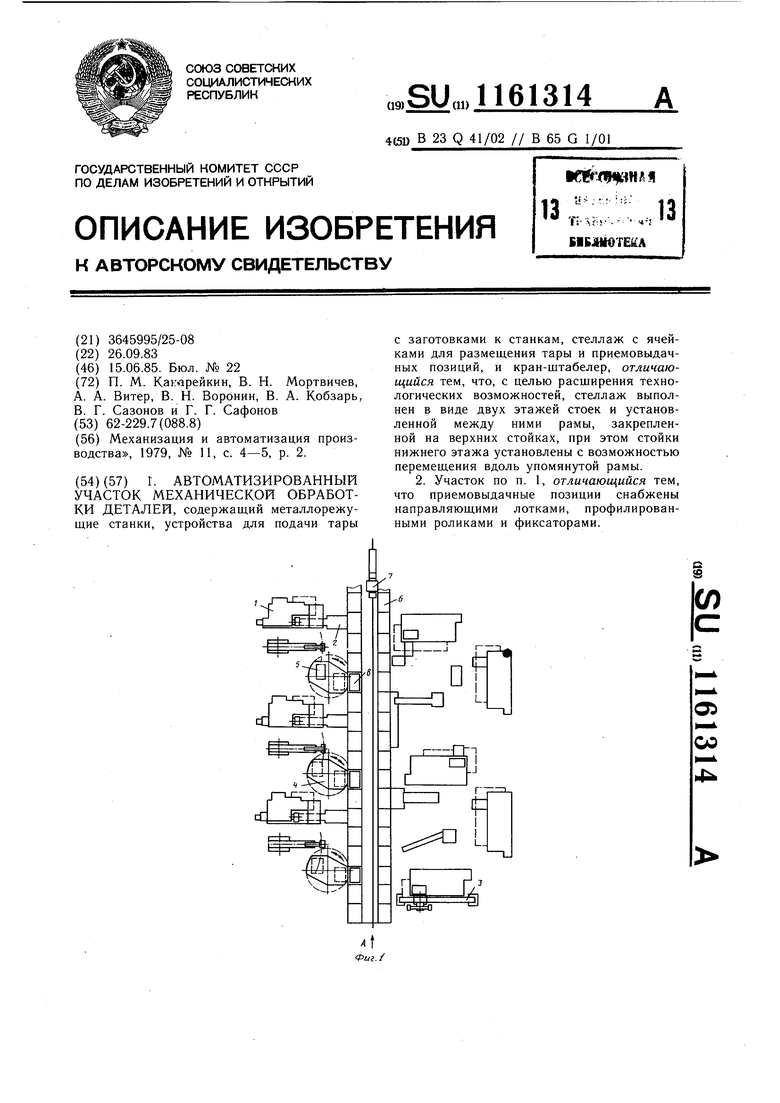
| Механизация и автоматизация производства, 1979, № 11, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
