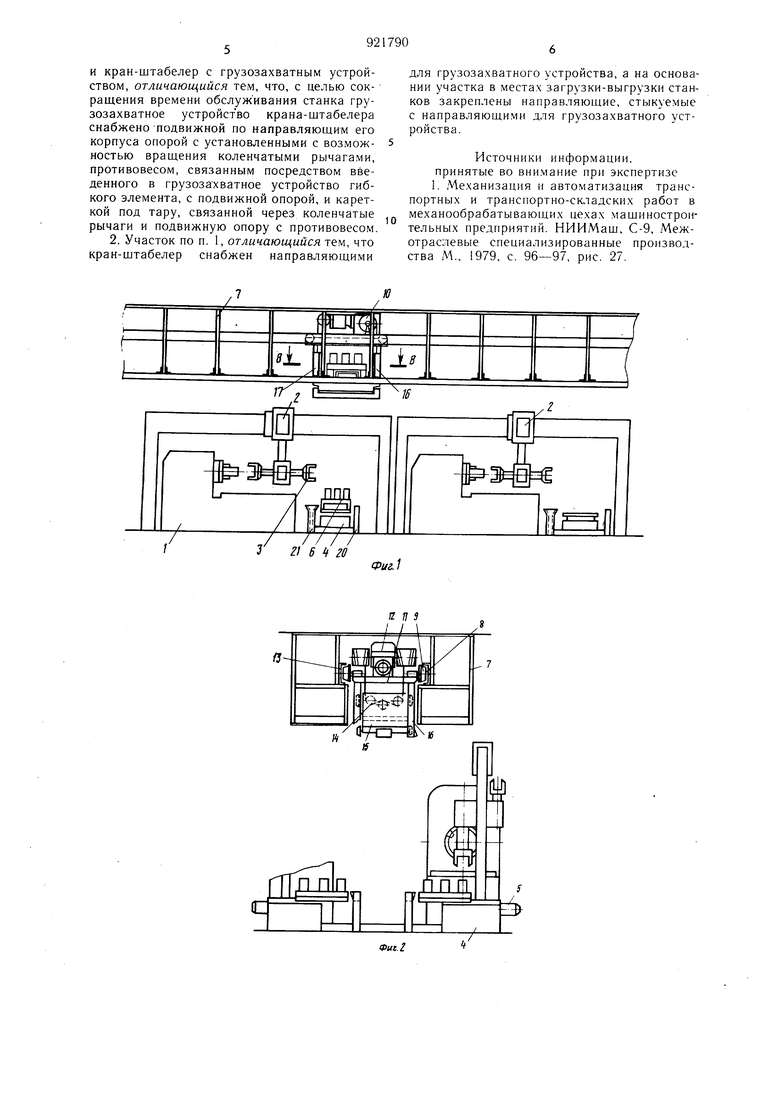
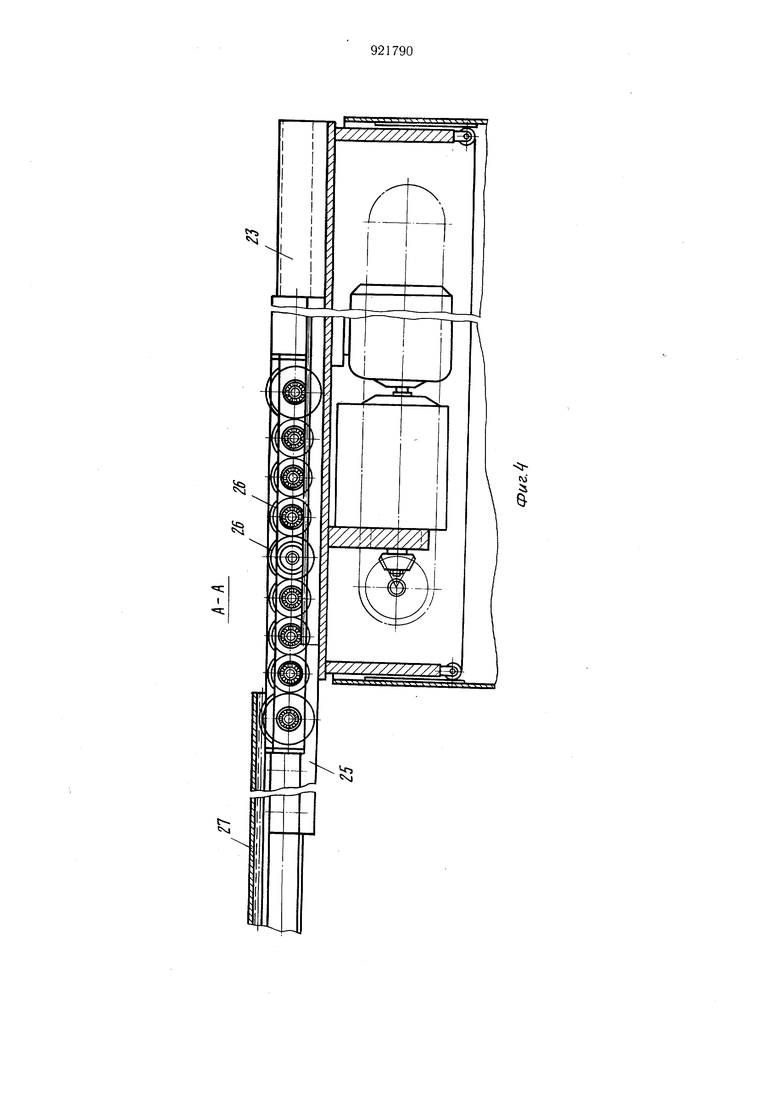
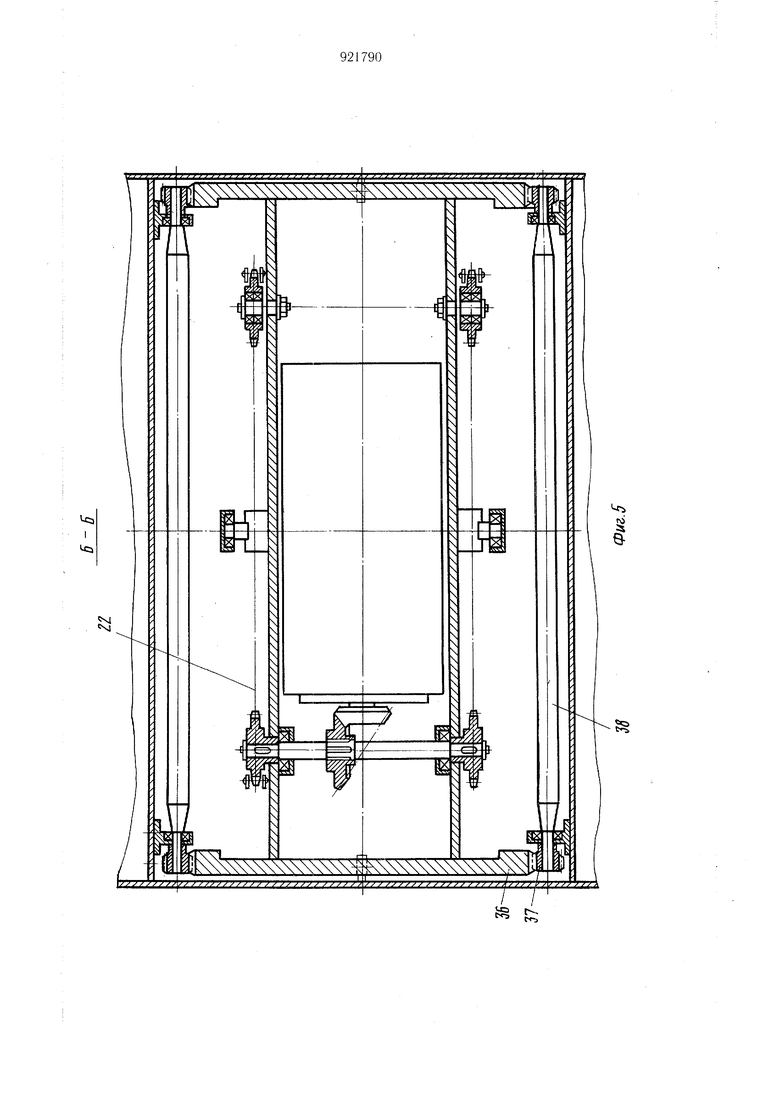
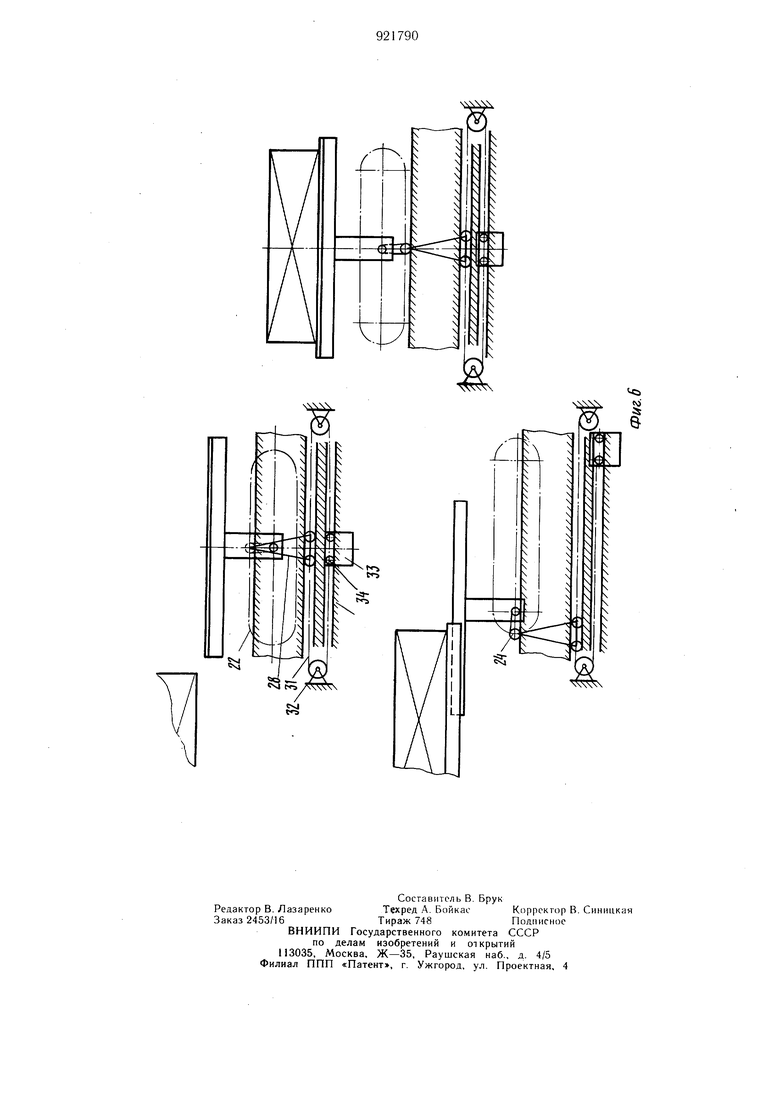
Изобретение относится к машиностроению и может быть использовано для автоматизации металлообработки. Известен автоматизированный участок механической обработки деталей, содержащий металлорежущие станки, устройства для установки и съема заготовок, например, станочные манипуляторы, стеллаж транспортно-накопительной системы для размещения тары и кран-штабелер с грузозахватным устройством 1. Недостатком известного участка является большое время обслуживания станка. Цель изобретения - сокращение времени обслуживания станка. Указанная цель достигается тем, что грузозахватное устройство крана-штабелера снабжено подвижной по направляющим его корпуса опорой с установленными с возможностью вращения коленчатыми рычагами, противовесом, связанным посредством введенного в грузозахватное устройство гибкого элемента, с подвижной опорой, и кареткой под тару, связанной через коленчатые рычаги и подвижную опору с противовесом. Кроме того кран-штабелер снабжен направляющими для грузозахватного устройства, а на основании участка в местах загрузки-выгрузки станков закреплены направляющие, стыкуемые с направляющими для грузозахватного устройства. На фиг. 1 представлен авто.матизированный участок, общий вид; на фиг. 2 - то же поперечный разрез; на фиг. 3 - грузоза.чватное устройство крана-штабелера участка; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5разрез Б-Б на фиг. 3; на фиг. 6 - схема работы грузозахватного устройства крана-штабелера. Автоматизированный участок механической обработки деталей управляемый от ЭВМ состоит из автоматизированных технологических единиц, содержащих станок 1 с ЧПУ, устройство для подачи и съема заготовок со станка 1, например станочный манипулятор 2 с захватной головкой 3, перемещающейся вдоль линий центров станка 1 и координатного стола 4, станка 1, перемещающегося от шагового привода 5 в направлении перпендикулярно.м линии центров станка 1, тару-накопитель 6 для заготовок и деталей. Над автоматизированными технологическими единицами установлен стеллаж транспортно-накопительной системы накопителя 7, по направляющим 8 в которой на катках 9 перемещается кран-щтабе тер 10, содержащий тележку 11 с приводом горизонтального перемещения и с приводом подъема 12, к которой на канатах 13 через блоки 14 подвешено грузозахватное устройство 15, при этом тележка 11 снабжена направляющими 16 и 17 для установочных катков 18 и 19 грузозахватного устройства 15, которые расгюложены в двух взаимно перпендикулярных плоскостях, примем у каждого координатного стола 4 установлены направляющие 20 и 21 для этих же установочных катков 18 и 19. Направляющие 16, 17, 20, 21 выполнены расщиренными на входах для установочных катков 18 и 19, при этом для каждого вида катков расширение выполнено в разных плоскостях. Грузозахватное устройство 15 крана-щтабелера 10 содержит два приводных горизонтальных цепных контура 22, расположенных на базовой секции 23 тележки захвата, с закрепленными на цепях коленчатыми рычагами 24, причем коленчатые рычаги 24 установлены на подщипниках в промежуточной секции 25, соединенной при помощи блока шестерен 26 и реек с грузонесущей кареткой 27, и в подвижной опоре 28, установленной на катках 29 в направляющих 30 на корпусе грузозахватного устройства 15. Подвижная опора 28 соединена при помощи канатов 31 через блоки 32 противовесом 33, перемещающимся на катках 34 по направляющим 35 корпуса грузозахватного устройства 15, соединенного с базовой секцией 23 при помощи реек 36, входящих в зацепление с щестернями 37, установленными попарно на валах 38, закрепленных на корпусе грузозахватного устройства 15. Работа автоматизированного участка осуществляется следующим образом. ЭВМ подает команду на микропроцессор, управляющий краном-щтабелером 10, взять тару-накогщтель 6 с определенным видом заготовок из стеллажа-накопителя 7 и подать на определенный координатный стол 4 определенного станка 1 с ЧПУ, при этом из библиотеки программ передаются програ.ммы на станок 1 и микропроцессор, управляющий станочным манипулятором 2 и координатным столо.м 4. Штабелер 10 перемещается по горизонтали над участком и несет тару-накопитель 6 до необходимого координатного стола 4 по направляющим 8 стеллажей-накопителей 7, после остановки включается привод подъема 12 и грузозахватное устройство 15 опускается на канатах 13, перекинутых через блоки 14, вместо загрузки-выгрузки, при этом установочные катки 18 и 19 фиксируются в расширенных на входах направляющих 18 и 19. После включения привода подъема 12 приводные цепные конту ры 22 перемещают коленчатые рычаги 24, выдвигающие промежуточную секцию 25, а та, в свою очередь, через блок щестерен 26 каретку 27, при этом подвижная опора 28 пере.мещается вместе с коленчатыми рычагами 24 на катках 29 направляющих i30, причем подвижная опора 28 при помощи канатов 31, перекинутых через блоки 32, перемещает в противоположную сторону противовес 33, в исходко.м положении находящийся в центре тяжести грузоподъемногоустройства 15, перемещающийся на катках 34 по направляющим 35. Когда коленчатые рычаги 24 пройдут пря.молинейный участок цепного контура 22, подвижная опора 28 останавливается, а с ней и противовес 33, при этом коленчатые рычаги 24 начинают поворачиваться относительно подвижной опоры 28 вокруг звездочек цепного контура 22 и поднимают или опускают базовую секцию 23. Выдвинутая каретка 27 производит съем или установку тары-накопителя 6 на координатный стол 4, причем строгая вертикальность подъе.ма базовой секции 23 и захвата осуществляется при помощи реек 36 и щестерен 37, установленных попарно на валах 38. После прохождения прямолинейного участка цепного контура 22 (звездочек 32) коленчатые рычаги 24, перемещая промежуточную секцию 25 каретки 27, подвижную опору 28, а с ней и противовес 33, возвращают захват в исходное положение, а противовес 33 - в центр тяжести грузоподъемного устройства 15. Затем.включается привод подъема 12, который поднимает грузоподъемное устройство вверх, при этом установочные катки 18 и 19 фиксируются в расширенных на входах направляющих 16 и 17 тележки 11. После установки тары-накопителя 6 на станок 1 станочный манипулятор 2 из исходного «нулевого положения перемещается до координатного стола 4, находящегося в «нулевом положении, и его захват 3 снимает заготовку из тары-накопителя 6 и устанавливает в патрон станка 1. От станка подача тары в стеллажи-накопители осуществляется аналогичным о:-разом, причем подача тары может производиться в обе стороны. В период работы одного станка 1 кран-щтабелер 10 обслуживает другие станки (автоматизированные технологические единицы). Таким образом, предлагаемое устройство технологично, позволяет автоматизировать процесс обработки деталей, увеличить производительность труда за счет сокращения затрат на транспортировку заготовок, сократить производственную площадь. Формула изобретения 1. Авто.матизированный участок механической обработки деталей, содержащий металлорежущие станки, устройства для установки и съема заготовок, например станочные .манипуляторы, стеллаж транспортно-накопительной системы для размещения тары
и кран-штабелер с грузозахватным устройством, отличающийся тем, что, с целью сокращения времени обслуживания станка грузозахватное устройство крана-штабелера снабжено подвижной по направляющим его корпуса опорой с установленными с возможностью вращения коленчатыми рычагами, противовесом, связанным посредством введенного в грузозахватное устройство гибкого элемента, с подвижной опорой, и кареткой под тару, связанной через коленчатые рычаги и подвижную опору с противовесом. 2. Участок по п. 1, отличающийся тем, что кран-щтабелер снабжен направляющими
для грузозахватного устройства, а на основании участка в местах загрузки-выгрузки станков закреплены направляющие, стыкуемые с направляющими для грузозахватного устройства.
Источники информации, принятые во внимание при экспертизе 1. Механизация и автоматизация транспортных и транспортно-складских работ в механообрабатывающих цехах машиностроительных предприятий. НИИМащ, С-9, Межотраслевые специализированные производства М., 1979, с. 96-97, рис. 27.
HW MM v--4b
7 Л 5 4 ге
Фиг.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный участок механической обработки деталей | 1984 |
|
SU1238946A2 |
| Автоматизированный участок механической обработки деталей | 1983 |
|
SU1161314A1 |
| Автоматизированный участок | 1983 |
|
SU1183351A1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Автоматизированный участок механической обработки корпусных деталей | 1986 |
|
SU1368161A1 |
| Гибкая производственная система | 1987 |
|
SU1491663A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| Автоматизированная транспортно-накопительная система | 1985 |
|
SU1306690A1 |
| Грузоподъемная платформа крана- шТАбЕлЕРА | 1979 |
|
SU793906A1 |

iz л S
Фис.2
